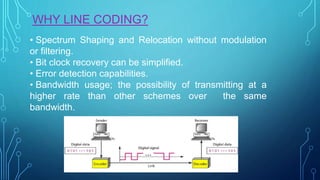
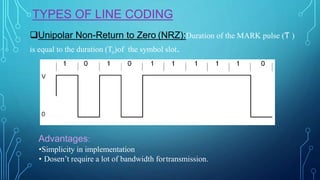
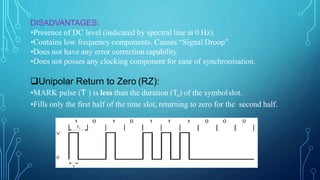
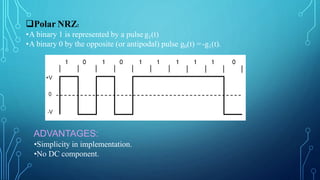
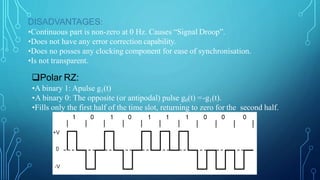
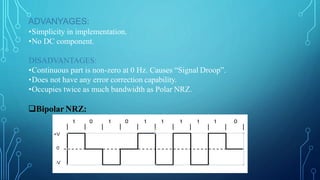
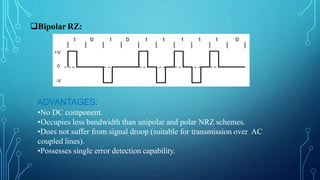
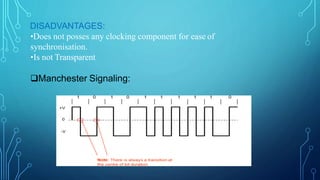
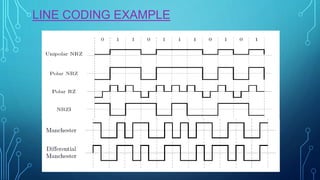
This document discusses line coding, which is the process of representing binary data as electrical pulses or signals to transmit over a communication channel. It describes several common line coding techniques such as NRZ, RZ, bipolar, and Manchester coding. For each technique, it outlines the advantages like bandwidth usage, error detection capabilities, and ease of clock recovery, as well as disadvantages such as DC component presence, signal droop, and transparency. The document provides examples of how each coding scheme encodes binary data into pulses and explains which properties each coding scheme optimizes for transmission.