Downloaded 64 times






![Gaming
•Currently, there is a new field of gaming called Neurogaming, which uses non-
invasive BCI in order to improve gameplay so that users can interact with a
console without the use of a traditional controller. Some Neurogaming software
use a player's brain waves, heart rate, expressions, pupil dilation, and even
emotions to complete tasks or effect the mood of the game. For example, game
developers at Emotiv have created non-invasive BCI that will determine the
mood of a player and adjust music or scenery accordingly. This new form of
interaction between player and software will enable a player to have a more
realistic gaming experience. Because there will be less disconnect between a
player and console, Neurogaming will allow individuals to utilize their
"psychological state"] and have their reactions transfer to games in real-time.
•However, since Neurogaming is still in its first stages, not much is written
about the new industry. The first NeuroGaming Conference was held in San
Francisco on May 1–2, 2013.](https://image.slidesharecdn.com/braincomputerinterface-140501221754-phpapp01/85/Brain-computer-Interface-11-320.jpg)



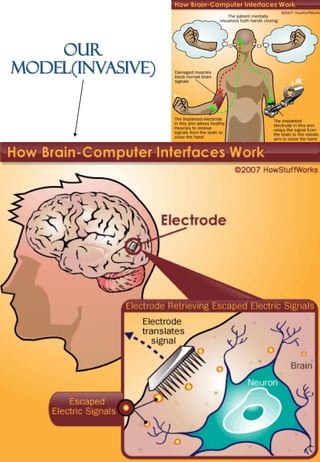


The document discusses applications of brain-computer interfaces (BCIs). It describes how BCIs can help people with disabilities like amyotrophic lateral sclerosis communicate and interact with their environment by bypassing damaged motor pathways. BCIs are also being used and developed for gaming applications through neurogaming. This allows games to be controlled and influenced by the player's brain activity and state. Finally, the document outlines some specific BCI applications for disabled people, including a wheelchair and robot arm that can be controlled by thought.