Downloaded 4,038 times

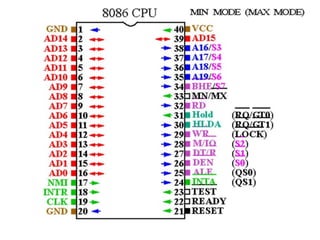
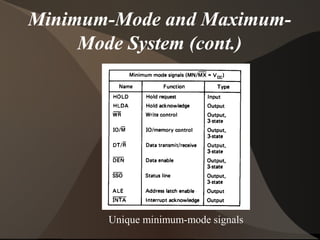
![AD15 –AD0 [ Pin 2- 16 &39]
The signal have dual function as in case of the 8085. They act as bus
during the first part of machine cycle and as data bus in the later part.
A19/S6 –A16/S3 [Pin 35- 38]
Contains address information in the first part and status bits in the
later part. The status bits, when decoded, indicates the type of
operations (eg. Memory access) being performed and the segment
register being used.
S4 S3 SEGMENT REGISTER
0 0 ES
0 1 SS
1 0 CS
1 1 DS
S5 = IF
S6 = 0
(ALWAYS)](https://image.slidesharecdn.com/8086-130806132326-phpapp01/85/The-Intel-8086-microprocessor-40-320.jpg)
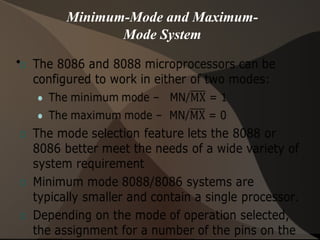
![BHE/S7 [pin 34]
MN/MX [pin 33]
High – Minimum Mode Operation
Low – Maximum Mode Operation
RD [pin 32]
Read or receive data from M or I/O device
TEST [pin 23]
Relate to wait instruction. The instruction puts the 8086 in
idle state which ends only when the TEST input goes low](https://image.slidesharecdn.com/8086-130806132326-phpapp01/85/The-Intel-8086-microprocessor-41-320.jpg)
![READY [Pin 22]
Ready is a signal provided by the memory or I/O devices to the
microprocesssor.When READY = High, the microprocessor
proceeds to process the data in usual manner. When READY =
Low, the micropressor goes into wait state and waits for READY to
become High.
RESET [Pin 21]
Resets the Processor](https://image.slidesharecdn.com/8086-130806132326-phpapp01/85/The-Intel-8086-microprocessor-42-320.jpg)
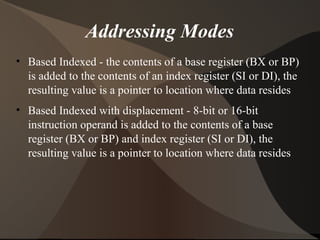
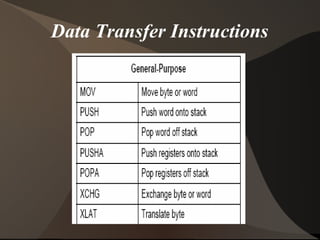
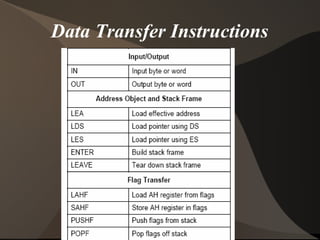
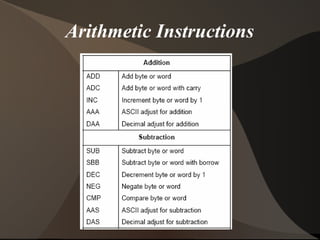
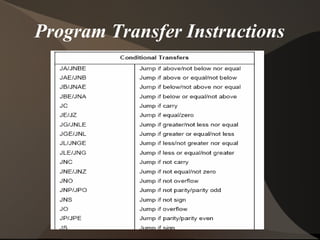

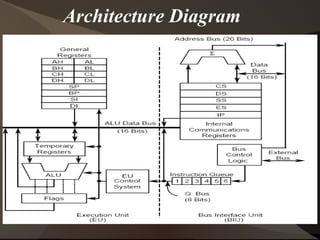
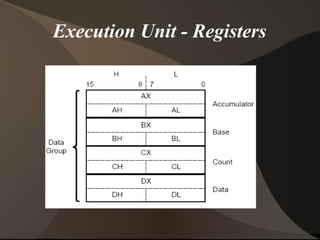
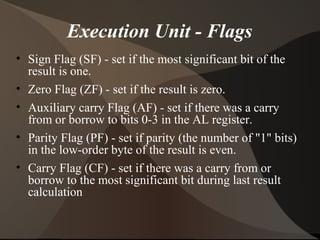
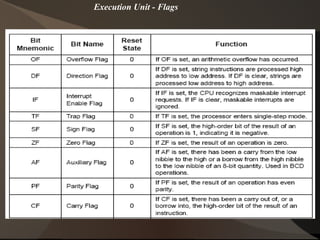
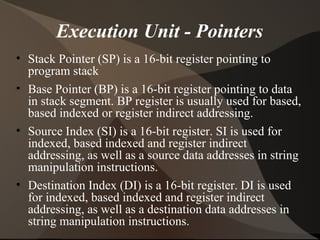
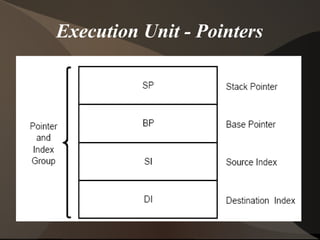
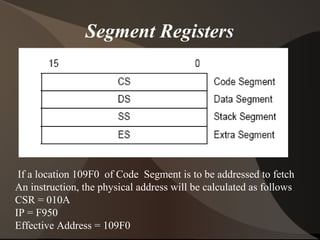
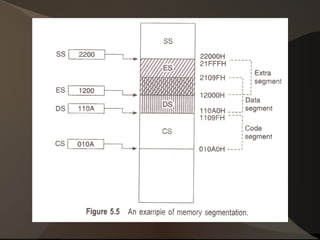
The document provides information on the architecture of the 8086 microprocessor. It describes the Execution Unit (EU) and Bus Interface Unit (BIU) that partition the CPU logic. The EU is responsible for executing instructions while the BIU handles fetching instructions and operands from memory. The EU contains an ALU, registers including general purpose, segment, pointer and index registers, and a flag register. It also describes the various addressing modes supported by the 8086.