Download as PDF, PPTX
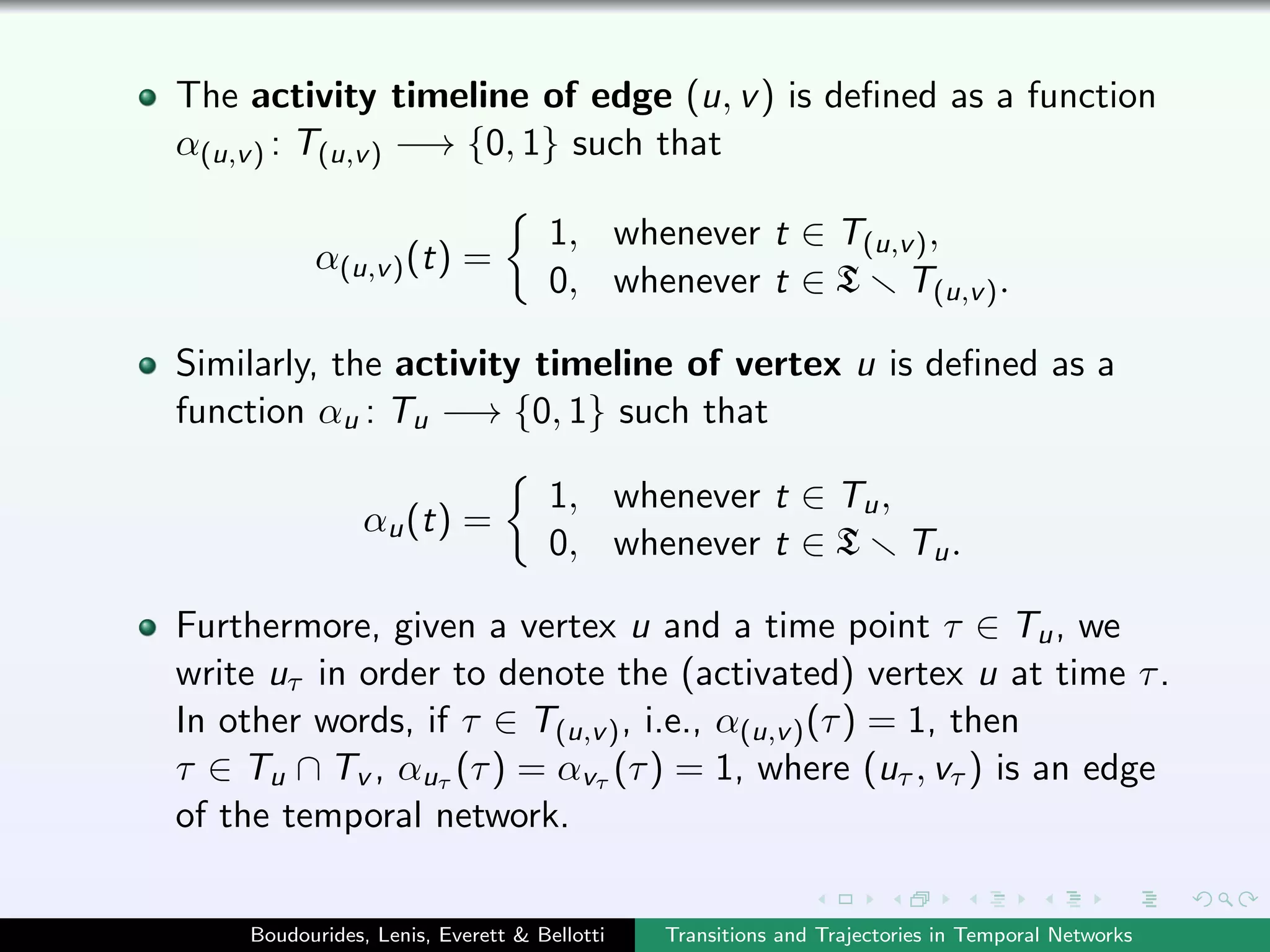
![To avoid certain technicalities, let us assume (from now on)
that we have a temporal network such that, for any edge or
vertex, the activity time set of this edge or vertex is a union of
disjoint intervals (each one having positive length).
Thus, for any edge e, the activity set Te of e is:
Te =
k
n=1
Tn(e).
Above k = k(e) and, for all n = 1, . . . , k, Tn(e) is a closed
interval of the form:
Tn(e) = [tn(e), tn(e)],
where tn(e), tn(e) ≥ 0, for n = 1, . . . , k, and:
tn(e) < tn(e) < tn+1(e).
Tn(e) is called n–th activity subinterval of the activity set Te
and tn(e), tn(e) are its left, right end points (respectively).
Boudourides, Lenis, Everett & Bellotti Transitions and Trajectories in Temporal Networks](https://image.slidesharecdn.com/trajectories1-150619095905-lva1-app6891/75/Transitions-and-Trajectories-in-Temporal-Networks-6-2048.jpg)

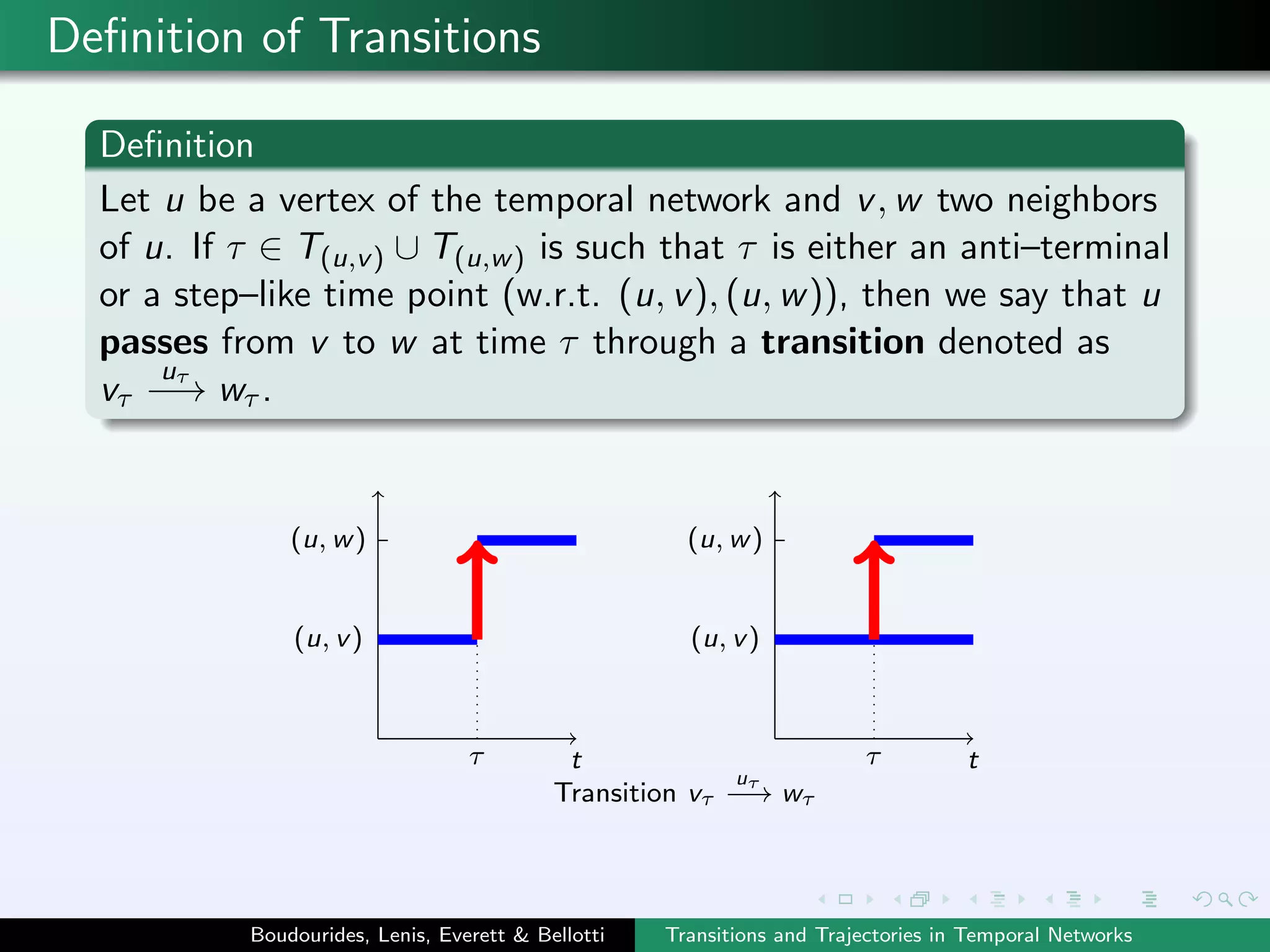
![Definition of Translations
Definition
Let u, v two adjacent vertices in the temporal network. If
τ, σ ∈ T(u,v), τ < σ, are such that [τ, σ] ⊂ [ti (u, v), ti (u, v)], for
some activity subinterval [ti (u, v), ti (u, v)], then we say that u
shifts from vτ to vσ through a translation denoted as vτ
u
vσ.
tti τ σ ti
Translation vτ
u
vσ
(u, v)
Remarks:
In a temporal network, neither transitions nor translations make up edges.
However, if two vertices are joined by a transition, it is possible (but not
necessary) that these vertices were joined by an edge too.
In a temporal network without self–loops, any two vertices joined by a
translation cannot be joined by an edge.
Boudourides, Lenis, Everett & Bellotti Transitions and Trajectories in Temporal Networks](https://image.slidesharecdn.com/trajectories1-150619095905-lva1-app6891/75/Transitions-and-Trajectories-in-Temporal-Networks-12-2048.jpg)
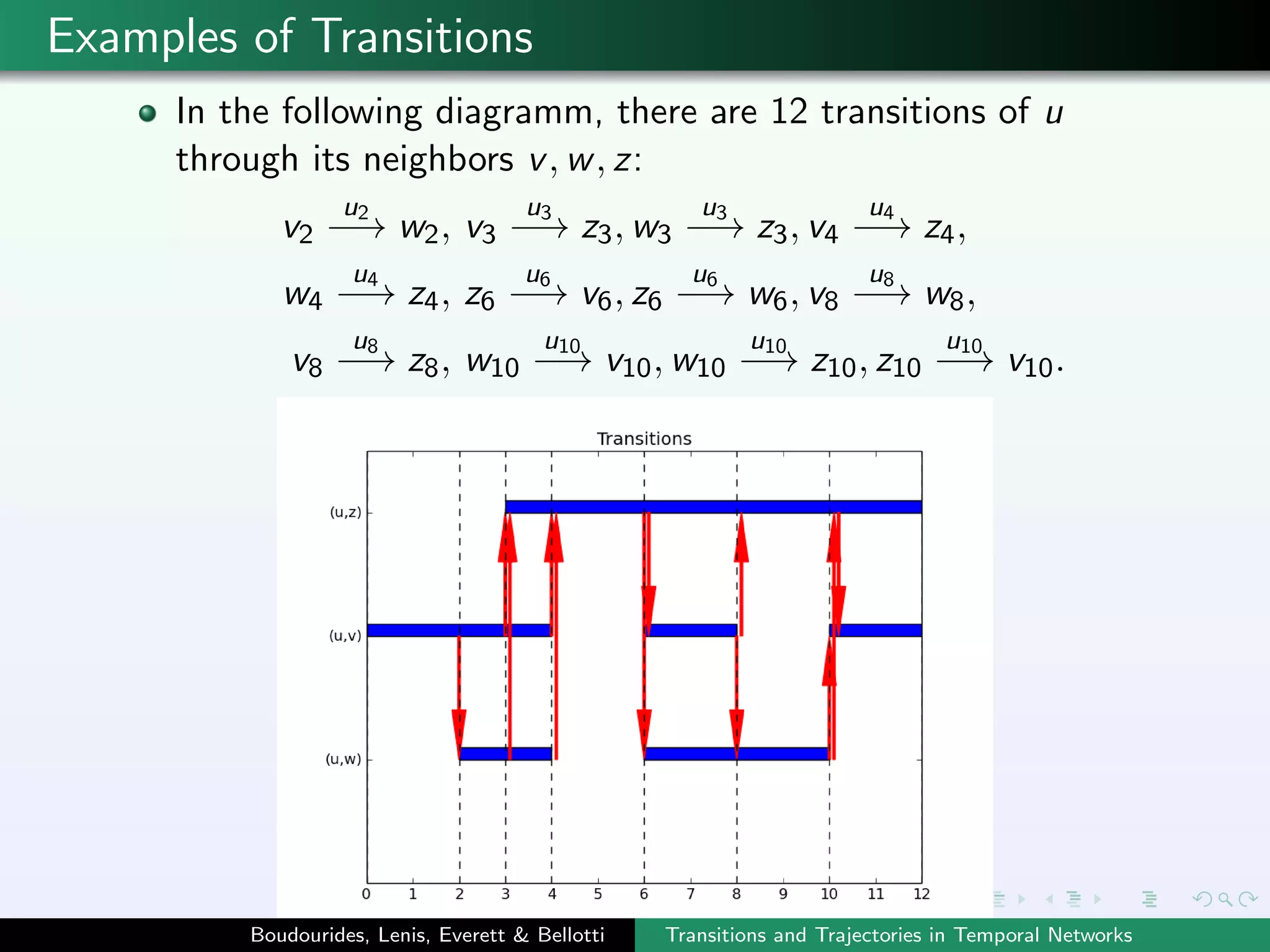
![Definition of Trajectories
Definition
In a temporal network, a trajectory of vertex u passing over its
neighbors v, w, z, . . . is an alternating sequence of vertices,
translations and transitions of the form:
[(v0, u, v1), (v1, u1, w1), (w1, u, w2), (w2, u2, z2), . . .]
where v0
u
v1 is a translation, v1
u1
−→ w1 is a transition,
w1
u
w2 is a translation, w2
u2
−→ z2 is a transition, etc.
Boudourides, Lenis, Everett & Bellotti Transitions and Trajectories in Temporal Networks](https://image.slidesharecdn.com/trajectories1-150619095905-lva1-app6891/75/Transitions-and-Trajectories-in-Temporal-Networks-13-2048.jpg)
![Example: Two Trajectories
t0 1 2 3 4
Trajectory [(v0, u, v1), (v1, u1, w1), (w1, u, w2), (w2, u2, v2), (v2, u, v3), (v3, u3, w3), (w3, u, w4)]
(u, v)
(u, w)
t0 1 2 3 4
Trajectory [(v0, u, v3), (v3, u3, w3), (w3, u, w4)]
(u, v)
(u, w)
Boudourides, Lenis, Everett & Bellotti Transitions and Trajectories in Temporal Networks](https://image.slidesharecdn.com/trajectories1-150619095905-lva1-app6891/75/Transitions-and-Trajectories-in-Temporal-Networks-14-2048.jpg)

This document describes computational tools for analyzing transitions and trajectories in temporal networks. It defines key concepts such as edges and vertices having activity timelines, transitions occurring when edges become active/inactive at the same time, and trajectories being alternating sequences of translations and transitions that vertices undergo. Python code is provided to generate temporal networks, display transitions and trajectories, and output trajectory statistics.

































![[Up! Essência] Produtos](https://cdn.slidesharecdn.com/ss_thumbnails/prod-130615145027-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)