Download as PDF, PPTX
![Faster R-CNN:
Towards Real-Time Object Detection with
Region Proposal Networks
Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun
[paper@NIPS15][arXiv][python][matlab][slides by R. Girshick]
Slides by Amaia Salvador [GDoc]
Computer Vision Reading Group (01/03/2016)](https://image.slidesharecdn.com/03fasterr-cnn-towardsreal-timeobjectdetectionwithregionproposalnetworks-160301150110/85/Faster-R-CNN-Towards-real-time-object-detection-with-region-proposal-networks-UPC-Reading-Group-1-320.jpg)
![Faster R-CNN:
Towards Real-Time Object Detection with
Region Proposal Networks
Shaoqing Ren, Kaiming He, Ross Girshick, Jian Sun
[paper@NIPS15][arXiv][python][matlab][slides by R. Girshick]
Slides by Amaia Salvador [GDoc]
Computer Vision Reading Group (01/03/2016)](https://image.slidesharecdn.com/03fasterr-cnn-towardsreal-timeobjectdetectionwithregionproposalnetworks-160301150110/75/Faster-R-CNN-Towards-real-time-object-detection-with-region-proposal-networks-UPC-Reading-Group-1-2048.jpg)





![Summary
37
● Faster R-CNN is the basis of the winners of COCO and
ILSVRC 2015 object detection competitions [1].
● RPN is also used in the winning entries of ILSVRC 2015
localization [1] and COCO 2015 segmentation competitions
[2].
[1] K. He, X. Zhang, S. Ren, and J. Sun, “Deep residual learning for image recognition,”
arXiv:1512.03385, 2015.
[2] J. Dai, K. He, and J. Sun, “Instance-aware semantic segmentation via multi-task
network cascades,” arXiv:1512.04412, 2015.](https://image.slidesharecdn.com/03fasterr-cnn-towardsreal-timeobjectdetectionwithregionproposalnetworks-160301150110/85/Faster-R-CNN-Towards-real-time-object-detection-with-region-proposal-networks-UPC-Reading-Group-37-320.jpg)

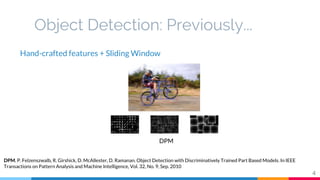
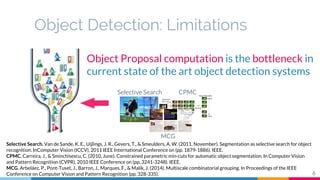
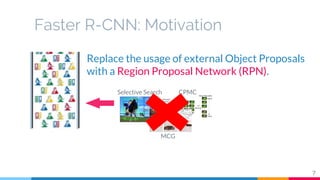
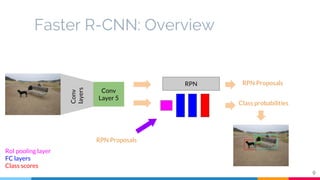
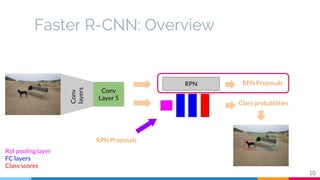
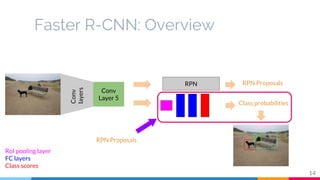
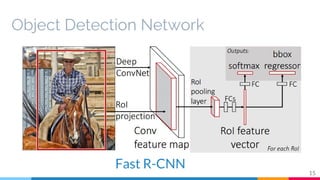
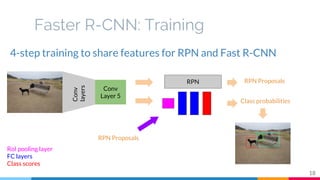
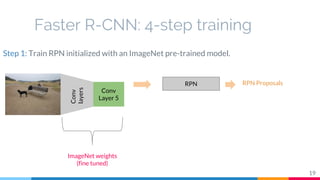
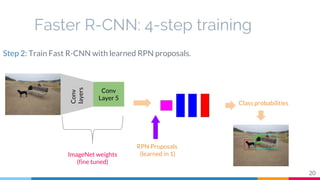
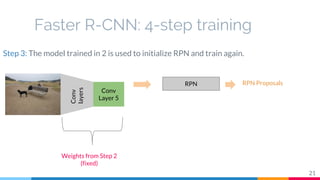
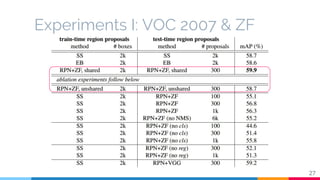
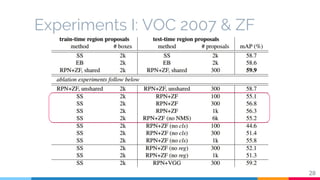
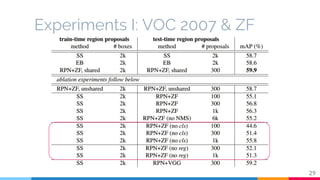
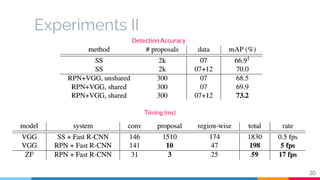
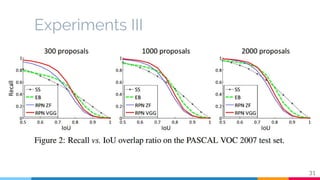
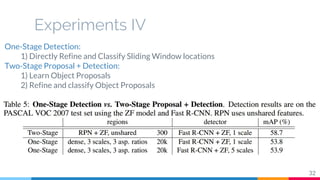
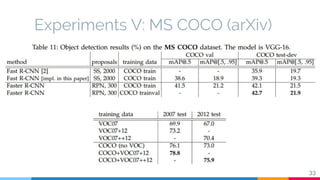
The document discusses Faster R-CNN, a real-time object detection framework that integrates a Region Proposal Network (RPN) to enhance efficiency by sharing convolutional features with the object detection network. It outlines the methodology behind Faster R-CNN, including how the RPN generates proposals, the training steps involved, and experiments that demonstrate its superior proposal quality and detection speed compared to previous methods. Faster R-CNN serves as a foundation for leading object detection systems in significant competitions.