1. ЗАНЯТИЕ 1. СВОБОДНАЯ МАТЕРИАЛЬНАЯ ТОЧКА.
Задача 27.16 (И.В.Мещерский)
На какую высоту
и за какое время
поднимется тело веса ,
брошенное вертикально вверх со скоростью , если сопротивление воздуха
может быть выражено формулой
, где - величина скорости тела?
(1.3)
5) - постоянный вектор,
- вектор постоянного
направления, а его модуль зависит от квадрата модуля
текущей скорости.
6) Проекция уравнения (1.3) на ось OZ
z
H
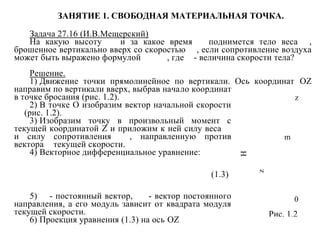
Решение.
1) Движение точки прямолинейное по вертикали. Ось координат OZ
направим по вертикали вверх, выбрав начало координат
в точке бросания (рис. 1.2).
z
2) В точке О изобразим вектор начальной скорости
(рис. 1.2).
3) Изобразим точку в произвольный момент с
текущей координатой Z и приложим к ней силу веса
и силу сопротивления
, направленную против
m
вектора текущей скорости.
4) Векторное дифференциальное уравнение:
0
0
Рис. 1.2
2. или
.
(1.4)
при
,
,
.
7) Момент времени
достижения точкой максимальной высоты
определяется обращением в ноль скорости её движения, поэтому
уравнение (1.4) необходимо преобразовать так, чтобы решая его, получить
зависимость
. Для этого необходимо ввести новую переменную
, что
приводит к дифференциальному уравнению с разделяющимися
переменными вида:
(1.5)
Решим уравнение (1.5) с учётом пределов изменения переменных
(1.6)
.
3. Для нахождения максимальной высоты подъёма точки, преобразуем
уравнение (1.5) так, чтобы, решая его, получить зависимость
. Для этого
необходимо перейти в нём к новой независимой переменной Z, умножая обе
его части на :
.
Учитывая, что
и, разделяя переменные, получим
.
(1.7)
Решим уравнение (1.7) с учётом пределов изменения переменных
(1.8)
8) Анализ полученных результатов (1.6) и (1.8) показывает, что с
увеличением начальной скорости
, максимальная высота
и время
подъёма
возрастают, а с увеличением коэффициента
силы
сопротивления эти параметры убывают, что соответствует физической
сущности явлений.
4. Задача 27.53 (И. В. Мещерский)
Определить движение тяжёлой материальной точки, масса которой равна
m, притягиваемой к неподвижному центру О силой, прямо пропорциональной
расстоянию. Движение происходит в пустоте; сила притяжения на единице
расстояния равна
; в момент
, причём ось
направлена по вертикали вниз.
y
Решение.
1) Ось
направим по вертикали вниз (по условию задачи), ось
горизонтали (Рис.1.3).
2) В начальный момент точка имеет
a
координаты
и
нулевую
начальную скорость.
x
0
3) В произвольный момент времени
положение точки определяется текущим
радиус-вектором
и на неё действует
сила тяжести
и сила притяжения
,
направленная к неподвижному центру .
4) Векторное
дифференциальное
m
уравнение :
(1.9)
y
Рис. 1.3
- по
x
5. 5)
- постоянный вектор, а сила притяжения
направлена всегда
против радиус-вектора , а её величина пропорциональна расстоянию точки
до центра. О (т.е. пропорциональна ) с коэффициентом
. Поэтому сила
притяжения может быть математически представлена в виде
(1.10)
Дифференциальное уравнение (1.9) с учётом (1.10) будет
или
(1.11)
6) Проектирование уравнения (1.11) на оси координат приводит к двум
независимым дифференциальным уравнениям с соответствующими
начальными условиями:
,
(1.12)
.
И
,
(1.13)
.
6. 7) Для решения поставленной задачи необходимо проинтегрировать
уравнения (1.12) и (1.13). Первое из них относится к линейным однородным
дифференциальным уравнениям, а второе- к линейным неоднородным
второго порядка. Методы решения таких уравнений известны. Начнём с
(1.12)
,
(1.14)
- характеристическое уравнение, корни которого
мнимые. Общее решение уравнения (1.14) будет
- чисто
,
(1.15)
где
и
-постоянные интегрирования подлежащие определению по
начальным условиям. Подставим в (1.15):
,
и найдём
,
.
Дифференцируем (1.15) по времени (находим проекцию скорости точки на
ось )
.
Подставляем в (1.16):
и находим
Таким образом, решение (1.15) с учётом найденных
.
(1.16)
,
и
будет
(1.17)
.
7. Решение неоднородного уравнения (1.13) приводится ниже:
-однородное уравнение, соответствующее уравнению (1.13) того же
типа, что и (1.14). Его общее решение
.
(1.18)
Частное решение уравнения (1.13) предлагается отыскать в виде
постоянной
.
(1.19)
Подставляя (1.19) в (1.13), получаем
.
Общее решение уравнения (1.13), складывающееся из (1.18) и (1.19) будет
.
(1.20)
Постоянные интегрирования
и
находим по начальным условиям.
,
.
Итак, решение (1.20) с учётом найденных
и
.
получается в виде
(1.21)
8. 8) Проанализируем полученные результаты. Во-первых, исключим
время из (1.17) и (1.21), а именно, находя из (1.17)
подставляя в (1.21), получим
(1.22)
т.е. траектория движущейся точки лежит на прямой. Так как
,
то траекторией будет лишь отрезок прямой (1.22) (рис.1.4). Итак, в условиях
поставленной задачи, точка будет совершать гармоническое колебание (1.17),
(1.21) периода
на отрезке прямой (1.22) (
).
0
-a
a
y
Рис. 1.4
x