Сборник задач повышенной сложности по теоретической механике (статика) содержит задачи по основным разделам статики, методики их решения и примеры. Издание предназначено для студентов технических специальностей и прошло рецензирование на кафедре теоретической механики. Включает задачи различной сложности, что позволяет использовать его как для подготовки к олимпиадам, так и в учебном процессе.




















![3 8
ОТВЕТЫ К ЗАДАЧАМ
1. tg/2 f. 2. = (Mвр
cos2
)/(ca). 3. f Q/(P + 2Q). 4. Ya
= –(P +
+ Q)tg/2. 5. M2min
= (aM1
)/(asin2
+ frcos). 6. M = (Pl)/((cos +
+ fsin)cos). 7. S = P/2. 8. max
= 2arctgf, fQmin
= fQ1
/(Q1
+ Q2
). 9. mx
=
= m1
A1
/R1
+ m2
A2
/R2
; my
= m1
B1
/R1
+ m1
B1
/R2
; mz
= m1
C1
/R1
+ m2
C2
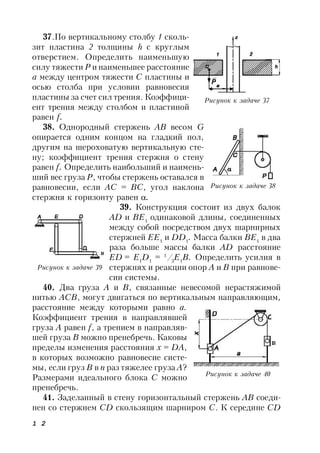
/R2
, где
R1
= ;2
1
2
1
2
1 CBA R2
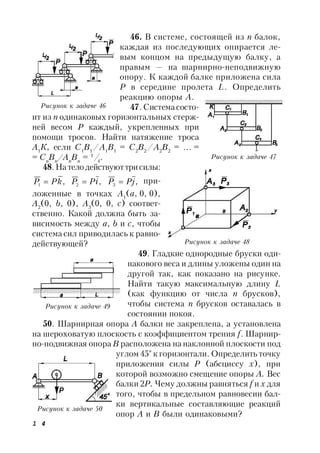
= .2
2
2
2
2
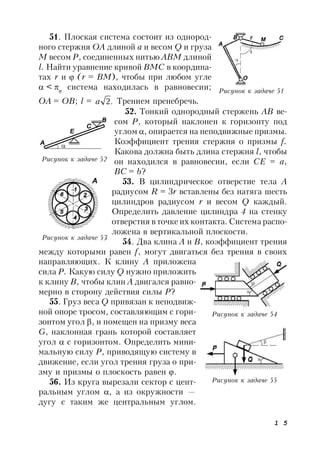
2 CBA Здесь принято, что векторы m1
, m2
направлены в сторону нормалей соответствующих плоскостей (вверх).
10. = arctg( 3 /9). 11. DQ(sin– cos/R)/d < P < DQ(sin + cos/R)/d.
12. l = Q(R + r)/(4c Rr ). 13. Векторы MO
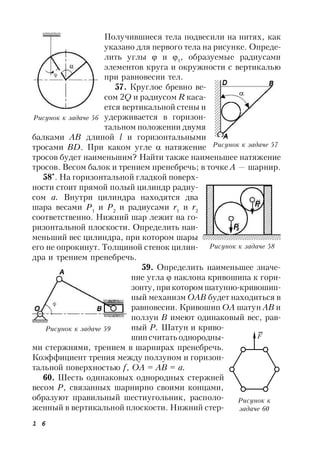
, MA
, MB
составляют с
плоскостью XOY одинаковые углы = arccos(V 22
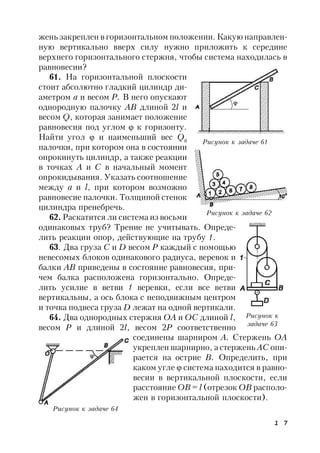
ba /2m). 14. Fmin
=
= P/3 .2 15. F min[f2
P2
/(cos – f2
sin), f1
(P1
+ P2
)/(cos – f1
sin)].
16. M2
/M1
= (b2
– a2
)/(b2
+ a2
). 17. f tg(/2). 18. = 2 – /2 равновесие
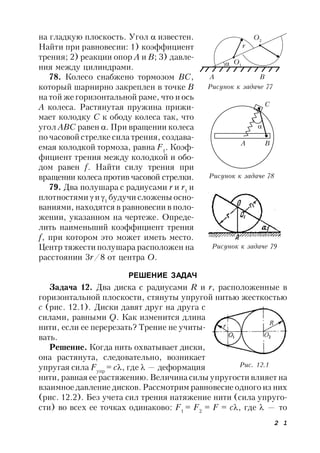
неустойчивое. 19. Часть эллипса x2
/a2
+ (y – a/2)2
/(a/2)2
= 1. 0 x a,
0 y a/2. 20. tg = (P1
– P2
)(1 + f2
)/((P1
+ P2
)(1 – f2
)) – 2f/(1 – f2
).
21. M2
= Pl, RC
= 2P/ ,3 RD
= P ,313 RE
= 0. 22. P = bQ/(b – 2f0
y). 23. Q =
= M 2 /3l. 24. F = M 3 /R. 25. f r/l, G2
G1
(Lr/l)(fl – r)/(l2
+ r2
).
26. SA
= 5F/c. 27. N2
= 2P – 36Pl/25r. 28. R = 5M/l. 29. tgk
= 2Q/(P/(2 (n –
– k) + 1)). 30. 00 RM — система не приводится к равнодействующей,
RXZ
= .22
hMM OA 31. b 6Rf/ ,91 2
f b 4Ra/ .4 22
ha 32. c =
= mg 2 /l. 33. T = Mg/ .6 34. R = 4F. 35. f 3 /3. 36. fmin
= 0,4. 37. amin
= h/2f, Pmin
0. 38. Pmin
= Gcos/(sin + 2fcos), Pmax
= Gcos/(sin –
2fcos). 39. SE
= 2,4P, SD
= 2,1P, YA
= 1,3P, YB
= 1,2P, где P — вес балки AD.
40. (–fan2
+ b)/(n2
– 1) x (fan2
+ b)/(n2
– 1), n > 1, b = a .1222
nnf
41. XA
= 0, YA
= –14 H, MA
= –32 H∙м, RC
= 2 H. 42. Расстояние пластины от
верхней опоры x = (Pl – mg2
)1
/P(1
+ 2
). 43. nmin
= 9. 44. F P(f +
+ )2( hRh /(R – h)). 45. f = tg. 46. YA
= 0,5P(1 – (a/l)n
)/(1 – a/l).
47. T = 2P(1 – 1/4n
)/3. 48. a + b + c = 0. 49. L = a/2 .)/1(
1
n
i
i 50. 1) x > (2f –
– 1)/(1 + f); 2) f = 1, x = l/2. 51. r = 2a 2 – 4aPcos/Q. 52. l (tg/f +
1)a + + 2b, tg f. 53. N = 4Q. 54. Q = P(sin + fcos/(sin + fcos). 55. Pmin
= Gtg + Qcossin(2– )/(coscos(+ – )). 56. tg = (1 – cos)/(3 –
1,5 + sin), tg1
= (1 – cos)/(2– + sin). 57. sin = 0,5; Tmin
= 4Qr/l.
58. Qmin
= P2
(2a – – r1
– r2
)/a. 59. = arctg(1/4f). 60. F = 3P. 61. cos = ,/3
la
NA
= Qtg, NC
= Q/cos, a l, Q0
= P/2tg2
. 62. Не раскатятся, RA
= 1,384P,
RB
= 2,268P. 63. T1
= P. 64. = arccos((1 + 51 )/10). 65. a/l 4f/ .161
2
f
66. M = Pa/2 + Q(a – bcos3
/2). 67. При f > /r 4(1 – /r) tg 4(1 + /r).
При f /r 4(1 – f) tg 4(1 + f). 68. xC
= 2rcos3
, yC
= rcos(2 – sin2).](https://image.slidesharecdn.com/zzsxilbrslkscaapmyeh-signature-7265c3e20b8e507ebe4bb1014784c684363c1b6eb97f77a9a34b9f01330933a1-poli-160712064535/85/572-38-320.jpg)
























![[6] kesetimbangan partikel & fbd](https://cdn.slidesharecdn.com/ss_thumbnails/6kesetimbanganpartikelfbd-120404040738-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)