занятие4. теоремы о количестве движения системы и движении центра масс системы.
1. 3. ТЕОРЕМЫ О КОЛИЧЕСТВЕ ДВИЖЕНИЯ СИСТЕМЫ И
ДВИЖЕНИИ ЦЕНТРА МАСС СИСТЕМЫ.(1 ЗАНЯТИЕ, 2 ЧАСА)
ЗАНЯТИЕ 4.
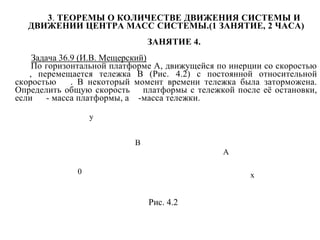
Задача 36.9 (И.В. Мещерский)
По горизонтальной платформе А, движущейся по инерции со скоростью
, перемещается тележка В (Рис. 4.2) с постоянной относительной
скоростью
. В некоторый момент времени тележка была заторможена.
Определить общую скорость платформы с тележкой после её остановки,
если
- масса платформы, а -масса тележки.
y
B
A
0
x
Рис. 4.2
2. Решение:
1) Рассмотрим систему, состоящую из двух взаимодействующих тел
(платформы и тележки).
2) Выберем систему координат (оси xOy, Рис 4.2).
3) В произвольный момент времени
приложим к точкам системы
внешние силы (силы тяжести платформы и тележки
и
; реакции
внешней связи – рельсов
,
). По условию задачи, внешними силами
сопротивления движению платформы пренебрегаем.
4) Выясним, каким свойством обладают внешние силы системы. ( В
нашей задаче все внешние силы вертикальны, а потому сумма проекции
всех внешних сил на ось О равна нулю, т.е.
. Имеет место следствие
3) теоремы о количестве движения, а именно
).
5) Реализуем свойство сохранения количества движения нашей системы
в проекции на ось ох.
- количество движения системы до торможения
тележки (здесь учтено, что
- проекция абсолютной скорости тележки
на ось ох)
- количество движения системы после торможения тележки
(здесь – проекция скорости платформы вместе с тележкой на ось О ). Далее
,
(4.7)
6) Анализ результата (4.7) показывает, что скорость платформы после
торможения тележки увеличится, при этом это увеличение тем больше, чем
больше относительная скорость
тележки и тем меньше, чем больше масса
платформы по отношению к массе тележки.
3. Задача 35.10 (И.В. Мещерский)
Электрический мотор массы
установлен без креплений на гладком
горизонтальном фундаменте;
на валу мотора под прямым углом
закреплён одним концом однородной стержень длины 2 и массы
, на
другой конец стрежня насажен точечный груз массы ; угловая скорость
вала равна ω (Рис. 4.3)
y
2l
ωt
x
x
0
Рис. 4.3
Определить: 1) горизонтальное движение мотора; 2) наибольшее
горизонтальное усиление , действующее на болты, если ими будет
закреплён кожух электромотора на фундаменте.
4. Решение.
Рассмотрим материальную систему, состоящую из корпуса мотора,
стержня и точечного груза.
1) Ось О системы, координат направим вдоль фундамента, а ось О –
вертикально через центр мотора в его начальном положении (считаем, что
стержень в начальный момент горизонтален).
2) В произвольный момент времени положение мотора определяется
текущей координатой
а положение стержня текущим углом
(вращение равномерное). Внешними силами, приложенными к точкам
системы при предположении, что фундамент гладкий, будут силы тяжести
,
,
и нормальные реакции фундамента 1 и 2 .
3) Характер внешних сил таков, что сумма их проекций на ось О равна
нулю, т.е.
. Имеет место следствие 3) теоремы о движении центра масс
системы, т.е. во всё время движения, координата х с её центра масс постоянна
( = 0, так как система начинает двигаться из состояния покоя, а потому =
Const).
4) Реализуем найденное свойство системы. В начальный момент (см.
первую формулу из (4.1) и рис. 4.3)
.
В произвольный момент
5. Далее, приравнивая выражения для ,
получим:
откуда
(4.10)
Результат (4.10) показывает, что корпус мотора будет совершать
гармонические колебания вдоль оси Ох с амплитудой
и периодом
.
Закрепим теперь корпус мотора на фундаменте (рис. 4.4), тогда к внешним
силам, приложенным к точкам системы добавятся горизонтальные реакции
болтов 1 и 2 .
6. y
2l
ωt
0
x
Рис. 4.4
Равнодействующая этих реакций
равна по величине, очевидно,
горизонтальному усилию, действующему на болты со стороны мотора.
Применив к динамике нашей системы теорему о движении её центра масс
в проекции на ось Ох получим:
.
(4.11)
Из (4.11) ясно, что для нахождения усилия R, необходимо найти х с (t) и
затем с (t).
(4.12)
(см. (4.1) и рис. 4.4.)
.
(4.13)
7. Подставляя (4.13) в (4.11) получим:
.
(4.14)
Результат (4.14) показывает, что на болты действует горизонтальное
усилие переменное как по величине, так и по направлению. Наибольшее его
значение будет:
.