1. ЗАНЯТИЕ 2. НЕСВОБОДНАЯ ТОЧКА.
Задача 31.3 (И.В. Мещерский)
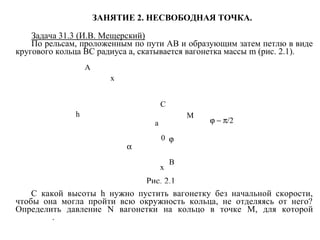
По рельсам, проложенным по пути АВ и образующим затем петлю в виде
кругового кольца ВС радиуса а, скатывается вагонетка массы m (рис. 2.1).
A
x
C
h
M
a
α
ϕ − π/2
0 ϕ
x
B
Рис. 2.1
С какой высоты h нужно пустить вагонетку без начальной скорости,
чтобы она могла пройти всю окружность кольца, не отделяясь от него?
Определить давление N вагонетки на кольцо в точке M, для которой
.
2. Решение.
Несвободное движение вагонетки, моделируемой материальной точкой,
состоит из прямолинейного на участке АВ и криволинейного внутри кругового
кольца.
Рассмотрим движение точки на участке АВ.
1) Ось координат Ax направляем вдоль участка АВ.
2) Материальная точка стартует из точки А без начальной скорости.
3) В произвольный момент времени положение точки определяется текущей
координатой x и к ней приложены сила тяжести и нормальная реакция
гладкой прямой АВ.
4) Векторное уравнение движения точки
(2.4)
5)
и постоянные силы.
6) Проекция уравнения (2.4) на ось Ax приводит к дифференциальному
уравнению движения точки на участке АВ:
,
где
- угол наклона прямой АВ к горизонту.
(2.5)
3. 7)
Проинтегрируем уравнение (2.5) с целью нахождения скорости
точки в
конце участка АВ учитывая, что
(
– текущая скорость точки на
участке АВ)
(2.6)
.
Рассмотрим криволинейное движение точки внутри кругового кольца под
действием сил
и
(
- реакция кольца). Уравнения (2.3) для
рассматриваемого случая будут:
,
(2.7)
.
(2.8)
Если учесть, что
(скорость точки на криволинейном участке), то
уравнения (2.7) и (2.8) будут
,
(2.9)
.
(2.10)
4. Чтобы определить реакцию N (давление) в текущей точке М, необходимо
знать текущую скорость V. Найдем ее, интегрируя уравнение (2.9) с
использованием, в качестве независимой переменной, угол .
,
так как
(
),
,
.
Если учесть (2.6), то
.
(2.11)
Если подставить найденное выражение (2.11) для
в (2.10), то величина
реакции
(а значит и давление вагонетки на рельсы) в зависимости от φ
будет:
(2.12)
5. 8) Анализ выражения (2.12) показывает, что наибольшее давление вагонетки
на рельсы будет
,
достигаемое при
(в точке В), а наименьшее
,
достигаемое при
(в верхней точке С).
Условием прохождения вагонеткой всей окружности кольца, очевидно,
будет
. Откуда
.
6. Задача 31.11 (И. В. Мещерский).
Лыжник при прыжке с трамплина спускается с эстакады АВ,
наклоненной под углом =30˚ к горизонту (Рис 2.2).
y
A
h
B
30º
C
x
z
l
E
45º
D
Рис. 2.2
Перед отрывом он проходит небольшую горизонтальную площадку ВС,
длиной которой при расчете пренебрегаем. В момент отрыва лыжник
толчком сообщает себе вертикальную составляющую скорости
=1м/с.
Высота эстакады =9м, коэффициент трения лыж о снег =0,08, линия
приземления CD образует угол =45˚ с горизонтом. Определить дальность l
полета лыжника, пренебрегая сопротивлением воздуха. Дальностью полета
считать длину, измеряемую от точки отрыва С до точки приземления
лыжника на линии CD.
7. Решение.
Движение лыжника, моделируемого материальной точкой, состоит из
несвободного прямолинейного на участках АВ и ВС и свободного по
некоторой криволинейной траектории.
Моделирование движения точки на участке АВ и нахождение её скорости
в точке В аналогичны рассмотренным в предыдущей задаче и приводятся ниже
без подробных пояснений.
Уравнение движения точки на участке АВ (вдоль оси AZ) будет
,
где
(2.13)
- сила трения.
Уравнение (2.13), с учетом выражения для силы трения, примет вид
или, с учетом числовых значений =9,81 м/с² и
.
Уравнение (2.14) в новых переменных
движения точки)
=0,08
(2.14)
(скорость прямолинейного
м/с.
8. Моделирование криволинейного движения осуществим в осях XCY.
Начальными
условиями
для
этого
движения
будут
(
м/с, так как на небольшом
горизонтальном участке ВС величина скорости практически не изменится,
м/с).
Свободное движение точки происходит под действием лишь силы
тяжести. Её уравнением движения будет
(2.15)
Проекции уравнения (2.15)
дифференциальным уравнениям:
на
оси
и
,
Интегрируем уравнение (2.16)
м/с,
,
Итак, решение
(2.16)
(2.17)
(т.к. при =0,
.
,
м/с)
=
= 0).
(2.18)
Интегрируем уравнение (2.17)
(так как при =0,
приводят
к
9. или y = -4,9 2 + + C4; C4 = 0,(так как при =0,
Итак, решение
=
= 0).
.
(2.19)
Найдем уравнение траектории свободного движения точки исключая
время t. из (2.18) и (2.19):
(2.20)
.
Для нахождения дальности l полета определим координаты точки Е
(точки пересечения параболической траектории (2.20) с прямой
прямой CD). Т. е. решим систему:
(2.21)
Используя метод подстановки, получим
33,78 м,
=
= -33,78 м,
м.
10. или y = -4,9 2 + + C4; C4 = 0,(так как при =0,
Итак, решение
=
= 0).
.
(2.19)
Найдем уравнение траектории свободного движения точки исключая
время t. из (2.18) и (2.19):
(2.20)
.
Для нахождения дальности l полета определим координаты точки Е
(точки пересечения параболической траектории (2.20) с прямой
прямой CD). Т. е. решим систему:
(2.21)
Используя метод подстановки, получим
33,78 м,
=
= -33,78 м,
м.