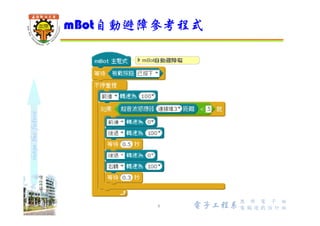
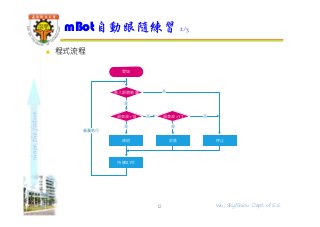
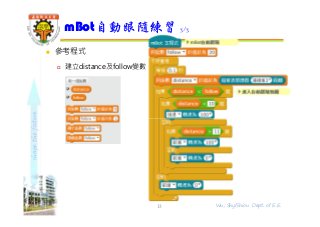
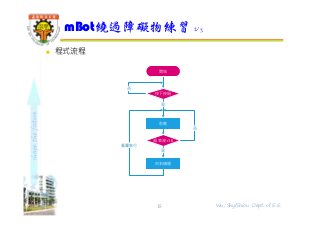
文档介绍了超音波的基本原理及其应用,包括测距、雷达、医疗等多个领域。通过mbot超音波模块的配合,提供了多个自动避障和跟随的编程示例以及程序逻辑。文档详细说明了如何利用超音波技术实现智能控制和机器人的自主功能。