Downloaded 121 times


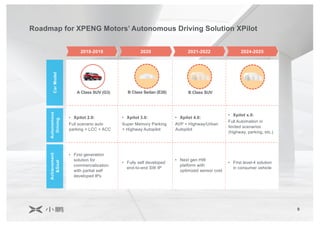
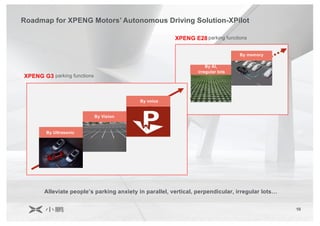


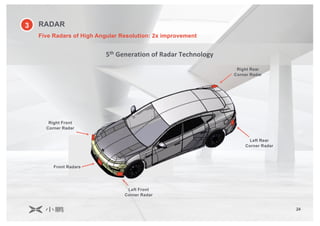
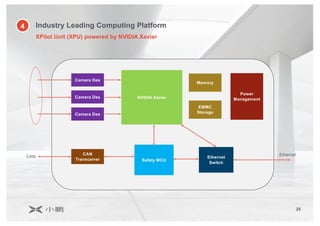
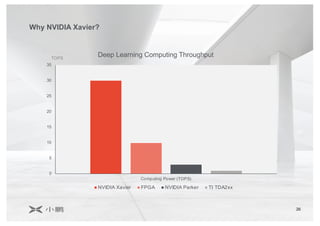
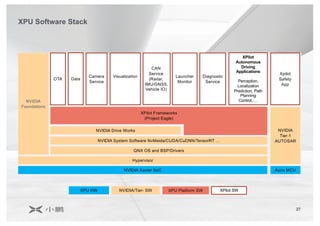
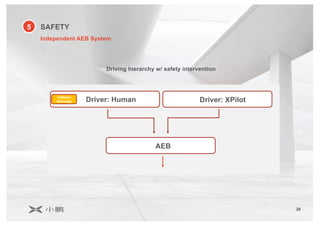
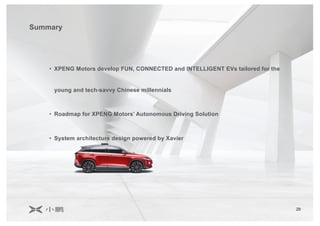

XPeng Motors focuses on developing intelligent electric vehicles with autonomous driving capabilities tailored for Chinese millennials. The company has a detailed roadmap for its autonomous driving solutions, including various levels of automation and advanced features optimized for the Chinese market. Their system architecture leverages high-performance computing platforms, like NVIDIA Xavier, to enhance perception and driving assistance technologies.

























![[오픈소스컨설팅]Atlassian Confluence User Guide_Full](https://cdn.slidesharecdn.com/ss_thumbnails/confluenceuserguidev4-151023042334-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)








































