Download as PDF, PPTX


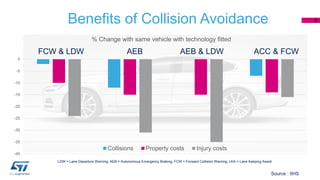



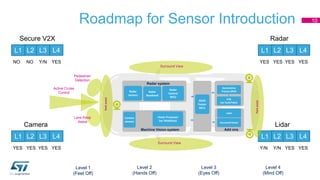
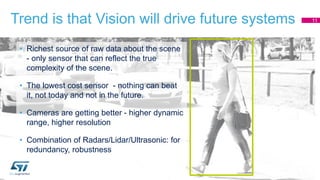


1) Cameras will be the dominant sensor for advanced driver assistance systems (ADAS) and automated driving, though radar and lidar may provide redundancy. 2) Vehicle-to-everything (V2X) communication allows vehicles to share information to deliver safety benefits beyond line-of-sight detection. 3) Security and protecting vehicle systems from attacks will be important as automated functions require data exchange between electronic control units and wireless connectivity increases.












![SPZ marketing brochure[1]](https://cdn.slidesharecdn.com/ss_thumbnails/6b2d2974-2512-42e6-98c7-ea7ee42d9fc4-161017014017-thumbnail.jpg?width=640&height=640&fit=bounds)






![[IJET-V1I2P11] Authors :Abdul Latif Saleem, Raja Sagar R, Sachin Datta N S, S...](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i2p11-150509054325-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)













































































