Download as PDF, PPTX










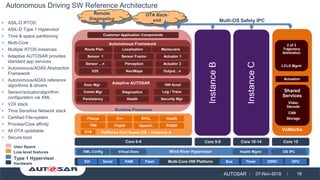
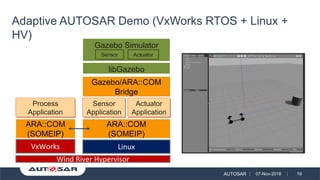
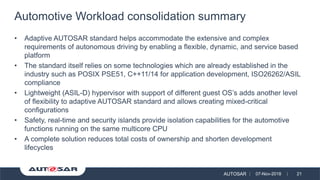
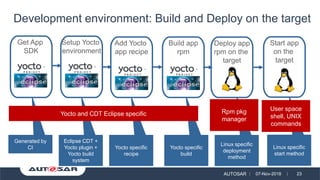
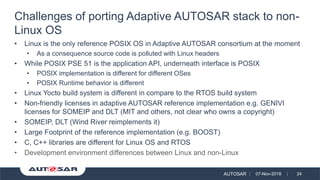
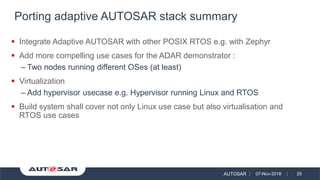


The document discusses the implementation of a mixed-critical adaptive AUTOSAR stack utilizing VxWorks and Linux, focusing on various automotive functions including ADAS and connected vehicle technologies. It highlights the lessons learned during the porting process to VxWorks RTOS and the challenges related to integrating with different operating systems. Additionally, it emphasizes the benefits of using hypervisors for workload consolidation and safety certification in autonomous driving systems.







































































