Download to read offline

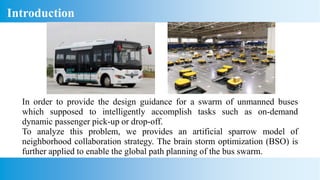
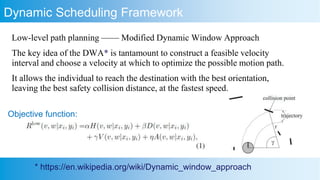

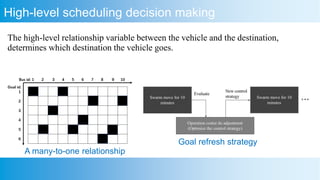
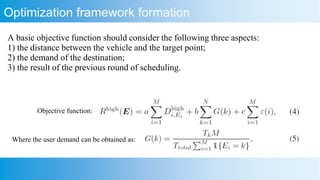
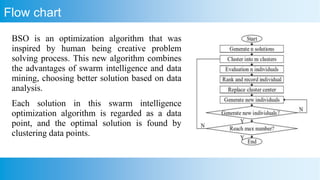
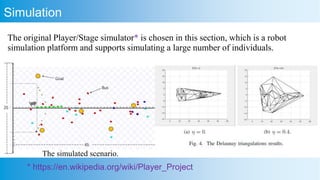
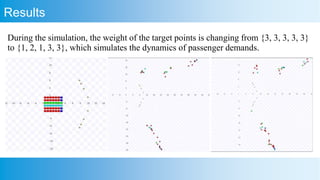

The document discusses a dynamic scheduling framework for a swarm of unmanned buses utilizing brain storm optimization (BSO) to intelligently manage on-demand passenger pick-up and drop-off. It introduces an artificial sparrow model for collaboration and highlights the BSO algorithm's ability to optimize path planning and scheduling decisions, avoiding local optima through random solution updates. Simulation results demonstrate the effectiveness of the proposed control strategy in managing changing passenger demands and ensuring safety within the bus swarm.






![[Seminar] 200508 hyunwook lee](https://cdn.slidesharecdn.com/ss_thumbnails/seminar200508hyunwooklee-200523073123-thumbnail.jpg?width=640&height=640&fit=bounds)