Downloaded 11 times
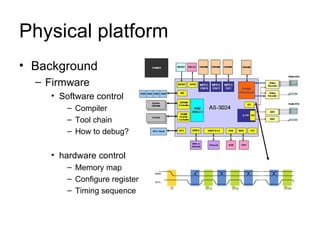
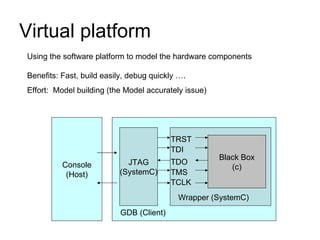
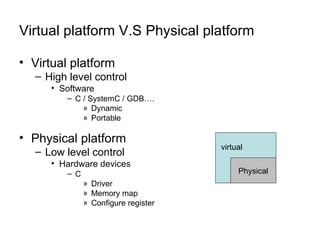
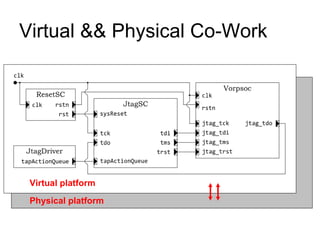
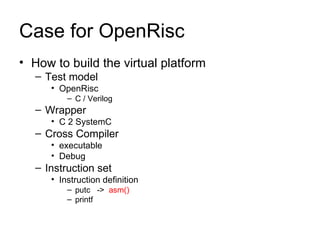
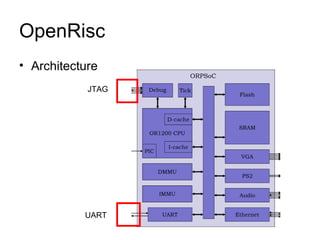
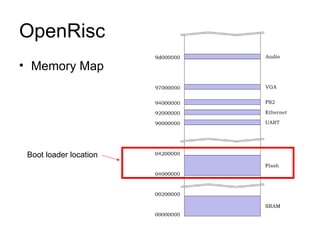
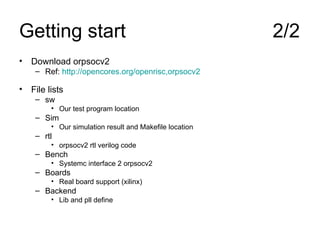
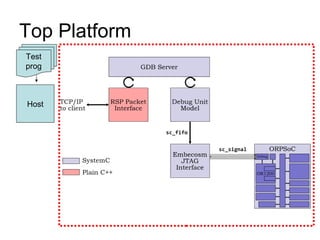
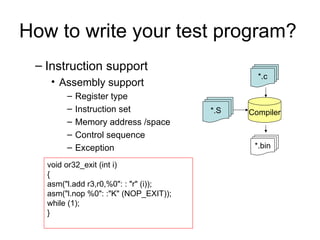
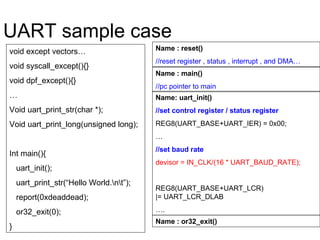
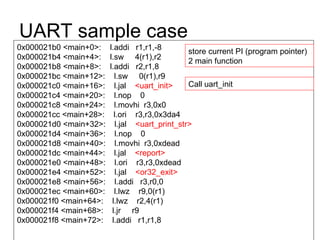
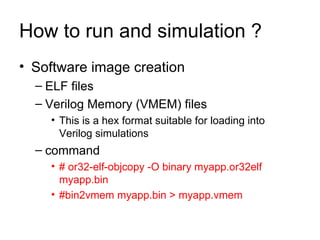
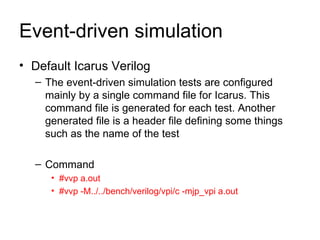
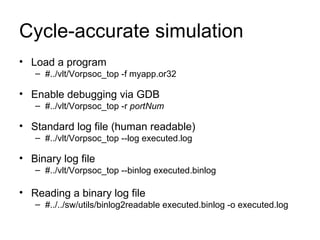
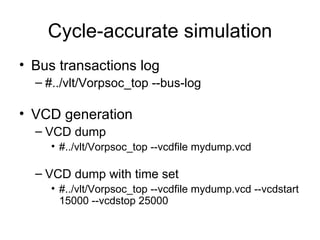
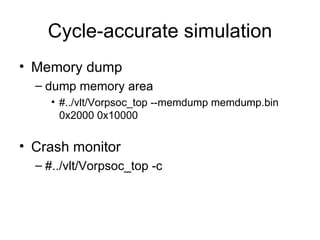

This document discusses building a virtual platform for the OpenRISC architecture using SystemC and transaction-level modeling. It covers setting up the toolchain, writing test programs, and simulating the platform using event-driven or cycle-accurate simulation with Icarus Verilog or the Vorpsoc simulator. The virtual platform allows fast development and debugging of OpenRISC code without requiring physical hardware.







![[COSCUP 2021] A trip about how I contribute to LLVM](https://cdn.slidesharecdn.com/ss_thumbnails/20210731coscup2021atripabouthowicontributetollvm-210731072923-thumbnail.jpg?width=640&height=640&fit=bounds)







![[COSCUP 2020] How to use llvm frontend library-libtooling](https://cdn.slidesharecdn.com/ss_thumbnails/howtousellvmfrontendlibrary-libtooling-200801165836-thumbnail.jpg?width=640&height=640&fit=bounds)