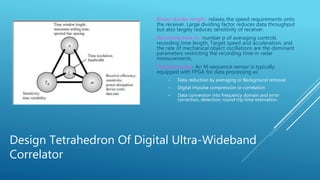
The document discusses ultra-wideband (UWB) sensor electronics focusing on m-sequence correlators used for measuring impulse response functions (IRF) of test objects. It explores the generation and advantages of binary pseudo-noise codes, particularly m-sequences, and the technical challenges in interpreting UWB signals. The text highlights the necessity of correlators for impulse compression and signal detection amidst noise, along with the methods for data processing and optimization in UWB systems.




































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
