Download as PDF, PPTX














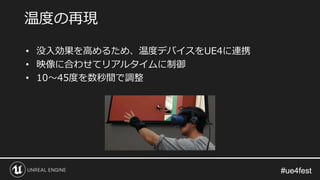


UNREAL FEST EXTREME 2020 WINTER 再生リスト https://www.youtube.com/playlist?list=PLr_Cbd4sUDTzxG9a4TrU0Rg6-ApCJBCsI 講演内容: 先進運転支援システム(ADAS)を始めとする車両開発に、UE4を活用する試みが世界中で検討されています。車両開発者が既に利用されているシミュレーションソフトとUE4を接続する上での課題や解決方法を、実例を交えてお伝えします。また車載のLiDARセンサーの検証をVR空間内で行う取り組みやHMI開発についてもご紹介致します。https://www.rikei.co.jp/product/639/ 講演者: 石川 大樹 ( 株式会社理経 新規事業推進室 室長 ) 田村 貴紀 ( 株式会社理経 新規事業推進室 XRソリューショングループ グループ長 ) KHUSINOV JAKHONGIR ( 株式会社理経 シニアエンジニア ) https://unrealengine.jp/unrealfest/ #ue4fest





![[UE4]マテリアルの注意すべきこと!~テクスチャロードとSwitch~](https://cdn.slidesharecdn.com/ss_thumbnails/ue4materialcaution-190309153116-thumbnail.jpg?width=640&height=640&fit=bounds)














![[UE4]自動テストでもっと楽したい!](https://cdn.slidesharecdn.com/ss_thumbnails/ue4automationtest-190527101956-thumbnail.jpg?width=640&height=640&fit=bounds)
































