「【増員!130名】【#TechBuzz】第16回 Unity 勉強会 Unityでつくるデジタルサイネージ / 学生がUnityで2Dゲームを作るとこうなる / IGDA Japan 福島GameJam2013開催報告と3年目の福島」にて発表した資料です。















![[IGC 2017] 넥슨코리아 심재근 - 시스템 기획자에 대한 기본 지식과 준비과정](https://cdn.slidesharecdn.com/ss_thumbnails/igc-170905073804-thumbnail.jpg?width=640&height=640&fit=bounds)




![[4.20版] UE4におけるLoadingとGCのProfilingと最適化手法](https://cdn.slidesharecdn.com/ss_thumbnails/ue4loadgcprofilingoptimization420-180802153630-thumbnail.jpg?width=640&height=640&fit=bounds)




![[PandoraCube] 게임 디자인 원리](https://cdn.slidesharecdn.com/ss_thumbnails/2019-200224191648-thumbnail.jpg?width=640&height=640&fit=bounds)





























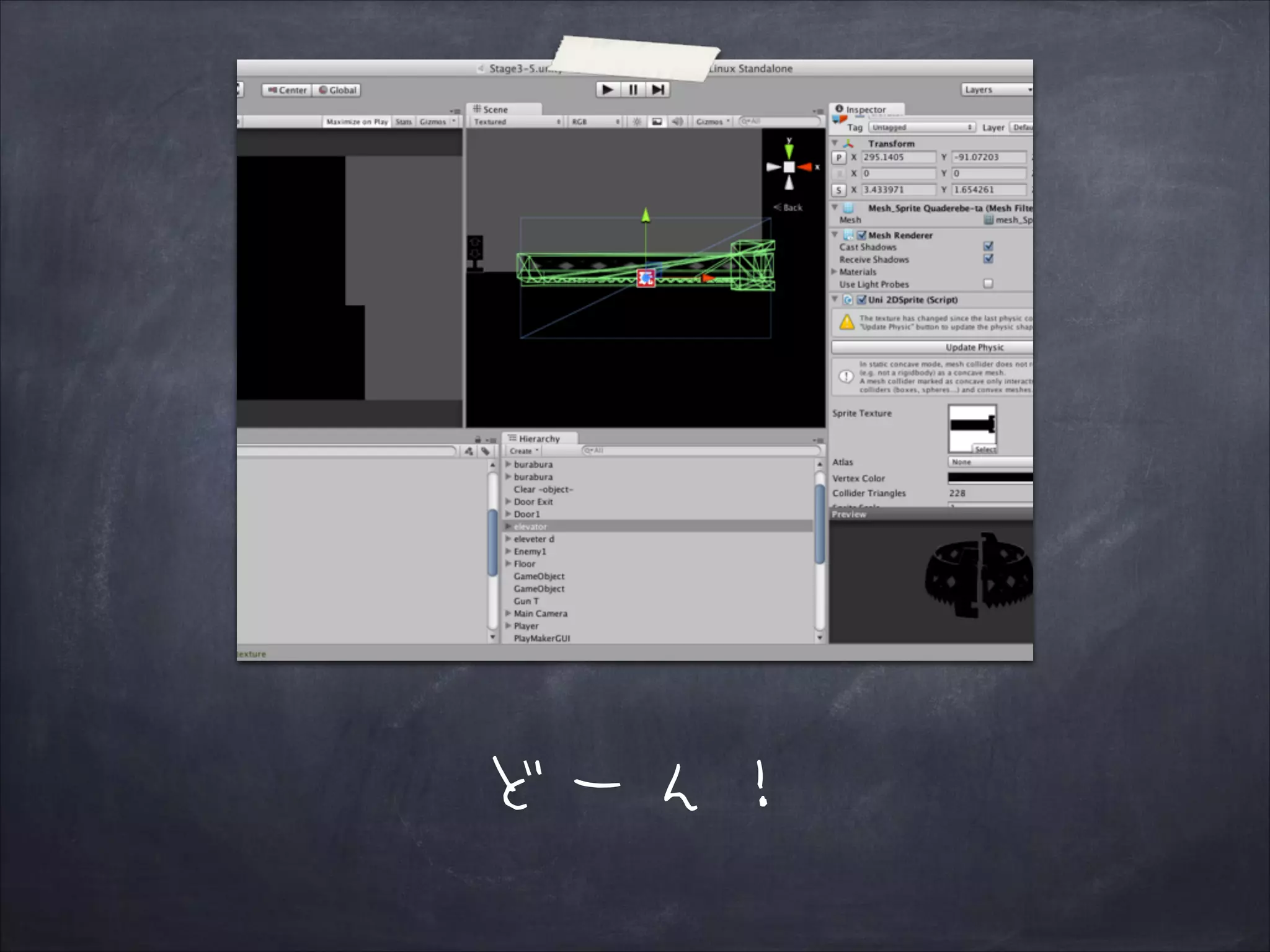
![[崇城大学][熊本Apps!] 学生のためのUnity勉強会](https://cdn.slidesharecdn.com/ss_thumbnails/unity-131216061232-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
