Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
miyanegi
PDF, PPTX
2,853 views
SLAM開発における課題と対策の一例の紹介
第6回 3D勉強会@関東 発表スライド https://3dvision.connpass.com/event/156241/
Engineering
◦
Read more
7
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 37
2
/ 37
Most read
3
/ 37
4
/ 37
5
/ 37
6
/ 37
7
/ 37
8
/ 37
9
/ 37
10
/ 37
11
/ 37
12
/ 37
13
/ 37
14
/ 37
15
/ 37
16
/ 37
17
/ 37
18
/ 37
19
/ 37
20
/ 37
21
/ 37
22
/ 37
23
/ 37
24
/ 37
25
/ 37
26
/ 37
27
/ 37
28
/ 37
29
/ 37
30
/ 37
31
/ 37
32
/ 37
33
/ 37
34
/ 37
35
/ 37
36
/ 37
37
/ 37
More Related Content
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
Visual slam
by
Takuya Minagawa
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
20190307 visualslam summary
by
Takuya Minagawa
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
PDF
ORB-SLAMを動かしてみた
by
Takuya Minagawa
オープンソース SLAM の分類
by
Yoshitaka HARA
Visual slam
by
Takuya Minagawa
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
20190307 visualslam summary
by
Takuya Minagawa
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
ORB-SLAMを動かしてみた
by
Takuya Minagawa
What's hot
PDF
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
20190825 vins mono
by
Takuya Minagawa
PPTX
SLAM勉強会(PTAM)
by
Masaya Kaneko
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PPTX
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
PPTX
ORB-SLAMの手法解説
by
Masaya Kaneko
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
PDF
深層学習によるHuman Pose Estimationの基礎
by
Takumi Ohkuma
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PDF
tf,tf2完全理解
by
Koji Terada
PDF
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
PDF
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
三次元点群処理ライブラリPCLと 統合ロボットシステム研究での 利用例の紹介
by
Ryohei Ueda
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
20190825 vins mono
by
Takuya Minagawa
SLAM勉強会(PTAM)
by
Masaya Kaneko
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
SfM Learner系単眼深度推定手法について
by
Ryutaro Yamauchi
ORB-SLAMの手法解説
by
Masaya Kaneko
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
深層学習によるHuman Pose Estimationの基礎
by
Takumi Ohkuma
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
tf,tf2完全理解
by
Koji Terada
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
Similar to SLAM開発における課題と対策の一例の紹介
PDF
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
PPTX
確率ロボティクス第11回
by
Ryuichi Ueda
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PPTX
3Dマップを活用したVisual Localization
by
Hajime Taira
PDF
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
PPTX
Robot frontier lesson3 2018
by
Ryuichi Ueda
PDF
SLAMっぽ方法で動きを測る (ROS Japan UG #24)
by
kiyoshiiriemon
PDF
Robotpaper.Challenge 2019-09 ver2
by
robotpaperchallenge
PDF
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
確率ロボティクス第11回
by
Ryuichi Ueda
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
3Dマップを活用したVisual Localization
by
Hajime Taira
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
Robot frontier lesson3 2018
by
Ryuichi Ueda
SLAMっぽ方法で動きを測る (ROS Japan UG #24)
by
kiyoshiiriemon
Robotpaper.Challenge 2019-09 ver2
by
robotpaperchallenge
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
SLAM開発における課題と対策の一例の紹介
1.
SLAM開発における課題と 対策の一例の紹介 3D勉強会 #6 井上
2.
自己紹介 井上 株式会社Preferred Networks エンジニア 学生
SfMをフルスクラッチで書く 1社目 MVSをフルスクラッチで書く 2社目 SLAMをフルスクラッチで書く 2
3.
SLAMは楽しい 3
4.
SLAMの開発はつらい 4
5.
どうしてつらいか? 真値が取れない 大量のハイパーパラメーター テストしにくい 5
6.
真値が取れない POINT 01 6
7.
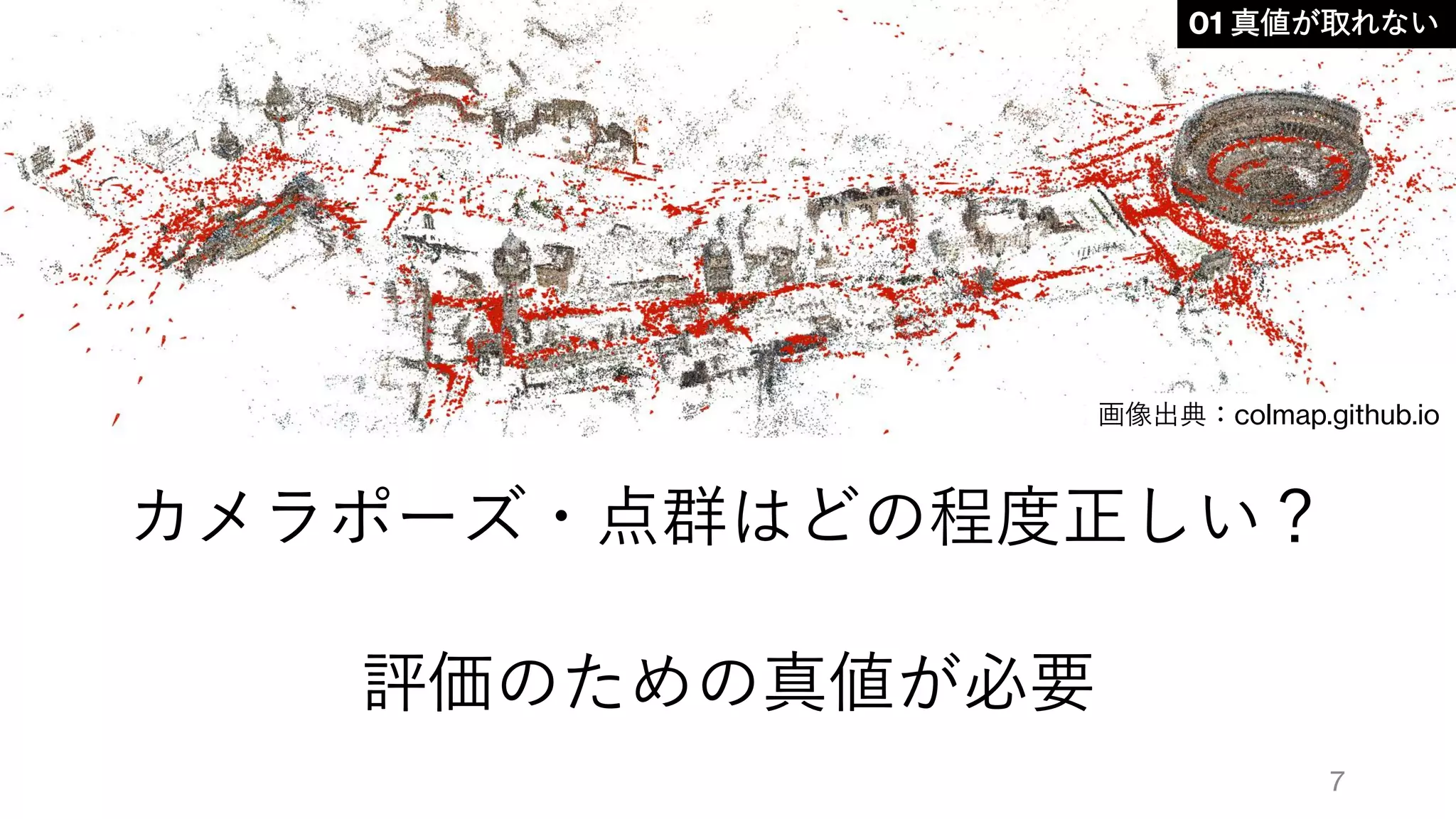
カメラポーズ・点群はどの程度正しい? 評価のための真値が必要 7 01 真値が取れない 画像出典:colmap.github.io
8.
真値をとるためにはコストがかかる 真値あり公開データセットを使う or コストをかけて真値を取る 01 真値が取れない 8
9.
データセット例 1/2 KITTI [IJRR
2013] 屋外、ステレオ、 LiDAR、GPS、IMU EuRoC [IJRR 2016] 屋内、ステレオ、IMU、 モーションキャプチャ、 レーザースキャナ 01 真値が取れない 9 画像は論文またはプロジェクトページから引用
10.
データセット例 2/2 TUM RGB-D
[IROS 2012] 屋内、RGB-D、 モーションキャプチャ ICL-NUIM [ICRA 2014] 屋内、CG 01 真値が取れない 10 画像は論文またはプロジェクトページから引用
11.
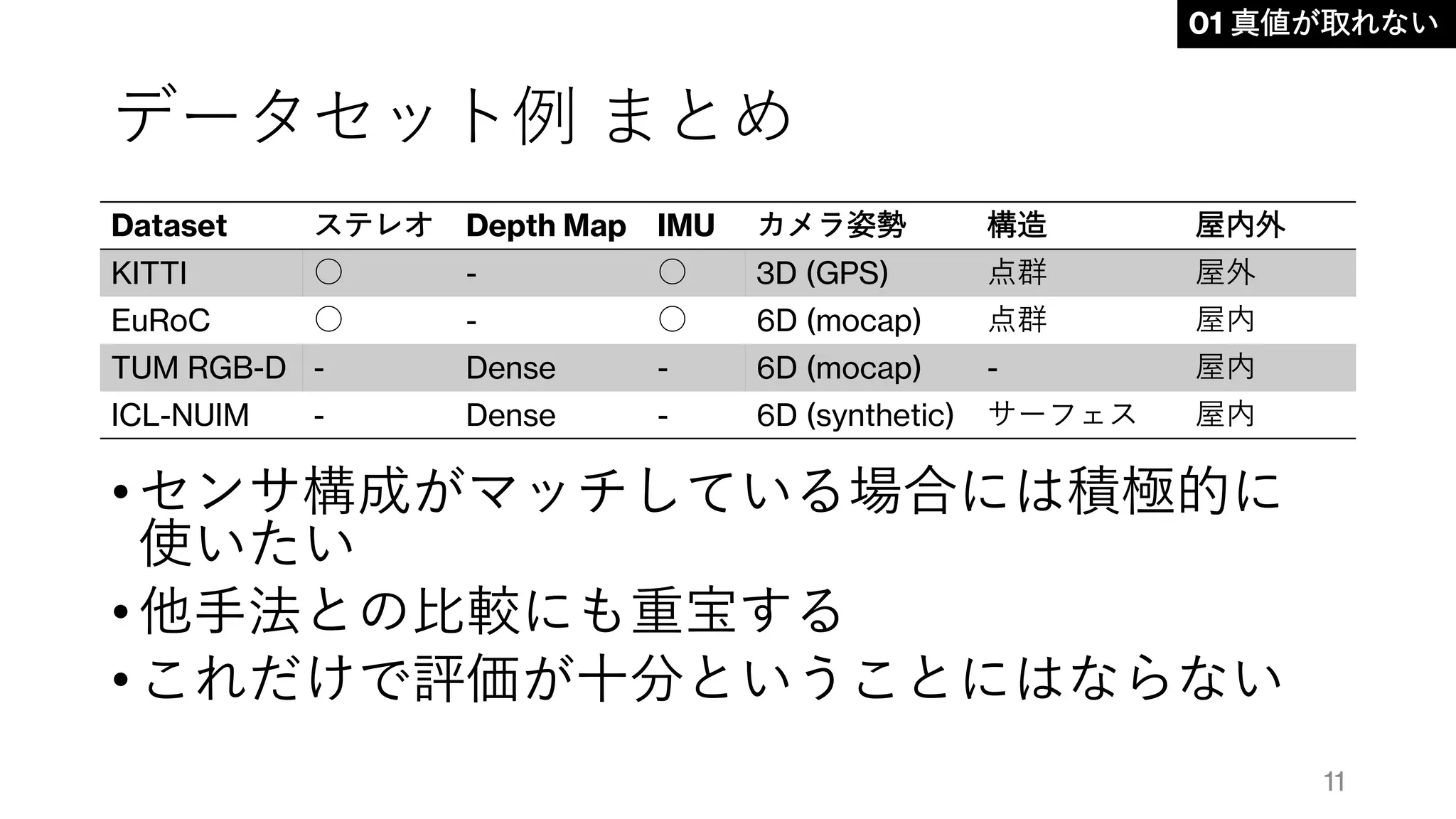
データセット例 まとめ • センサ構成がマッチしている場合には積極的に 使いたい •
他手法との比較にも重宝する • これだけで評価が十分ということにはならない Dataset ステレオ Depth Map IMU カメラ姿勢 構造 屋内外 KITTI ○ - ○ 3D (GPS) 点群 屋外 EuRoC ○ - ○ 6D (mocap) 点群 屋内 TUM RGB-D - Dense - 6D (mocap) - 屋内 ICL-NUIM - Dense - 6D (synthetic) サーフェス 屋内 01 真値が取れない 11
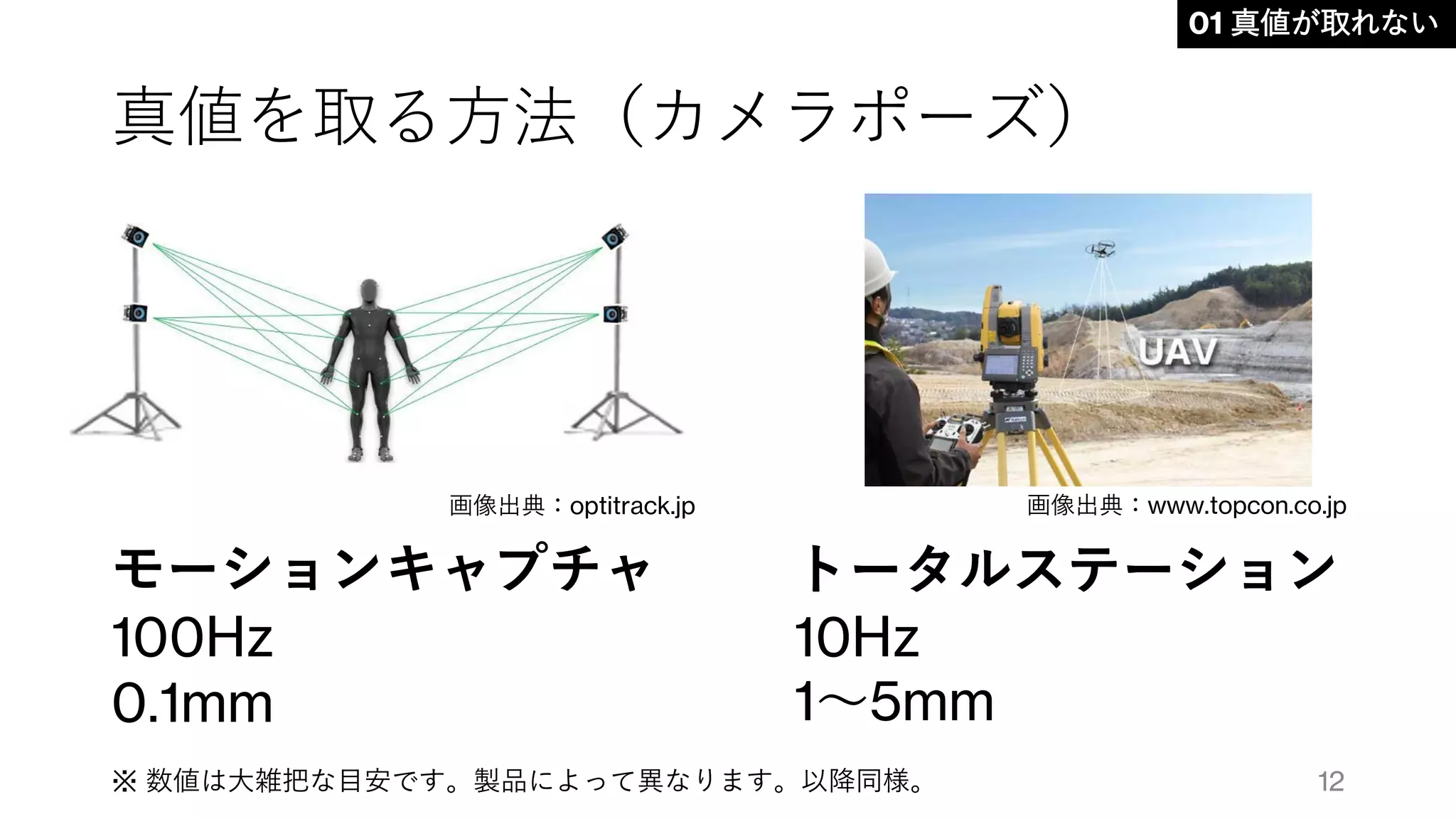
12.
真値を取る方法(カメラポーズ) 画像出典:optitrack.jp モーションキャプチャ 100Hz 0.1mm 画像出典:www.topcon.co.jp トータルステーション 10Hz 1~5mm 01 真値が取れない 12※ 数値は大雑把な目安です。製品によって異なります。以降同様。
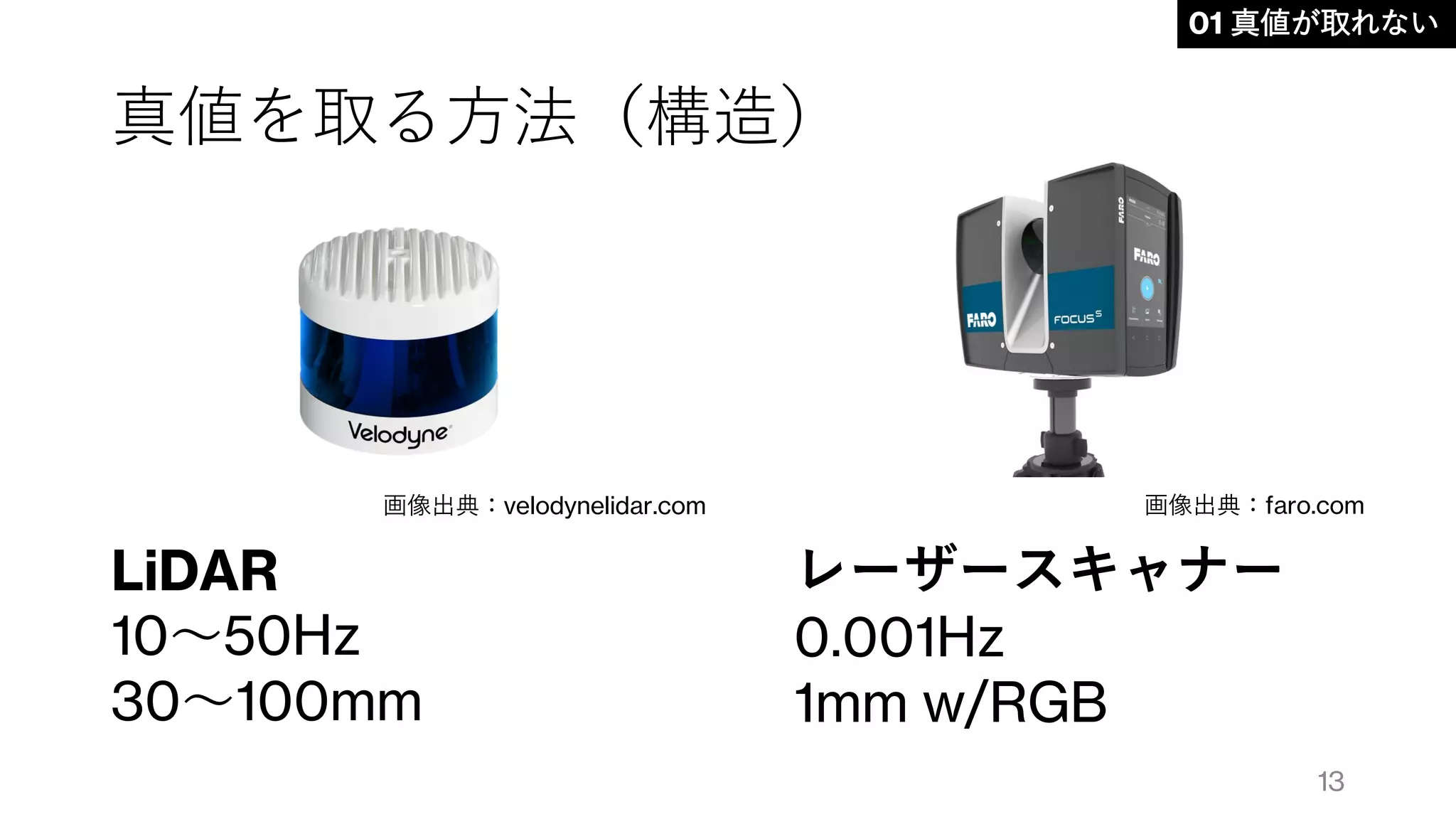
13.
真値を取る方法(構造) 画像出典:velodynelidar.com LiDAR 10~50Hz 30~100mm 画像出典:faro.com レーザースキャナー 0.001Hz 1mm w/RGB 01 真値が取れない 13
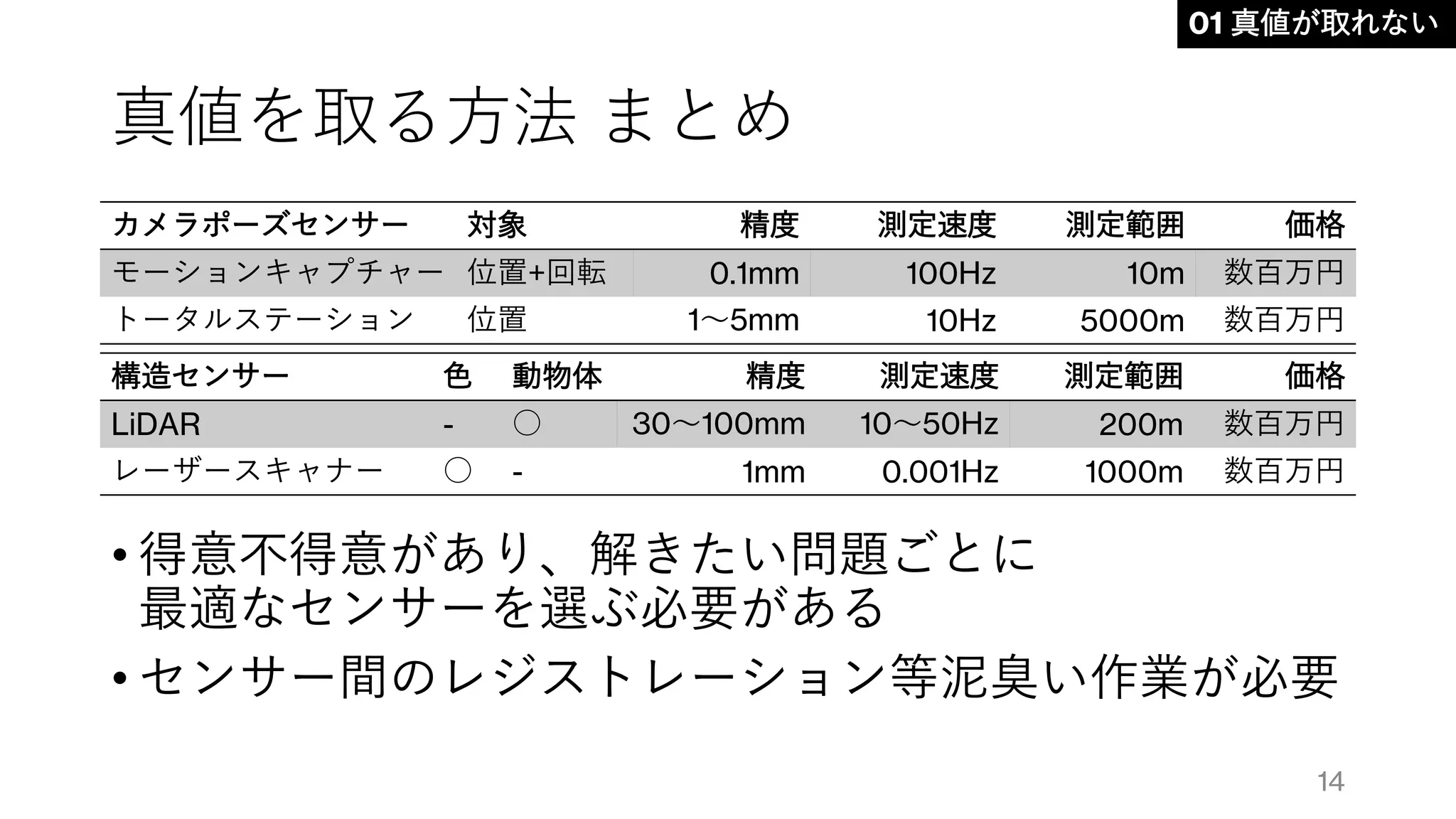
14.
真値を取る方法 まとめ • 得意不得意があり、解きたい問題ごとに 最適なセンサーを選ぶ必要がある •
センサー間のレジストレーション等泥臭い作業が必要 カメラポーズセンサー 対象 精度 測定速度 測定範囲 価格 モーションキャプチャー 位置+回転 0.1mm 100Hz 10m 数百万円 トータルステーション 位置 1~5mm 10Hz 5000m 数百万円 構造センサー 色 動物体 精度 測定速度 測定範囲 価格 LiDAR - ○ 30~100mm 10~50Hz 200m 数百万円 レーザースキャナー ○ - 1mm 0.001Hz 1000m 数百万円 01 真値が取れない 14
15.
まとめ 最初は公開データセットで評価しつつ、 目的のシーンで真値を計測し評価をする 01 真値が取れない 15
16.
大量のハイパーパラメーター POINT 02 16
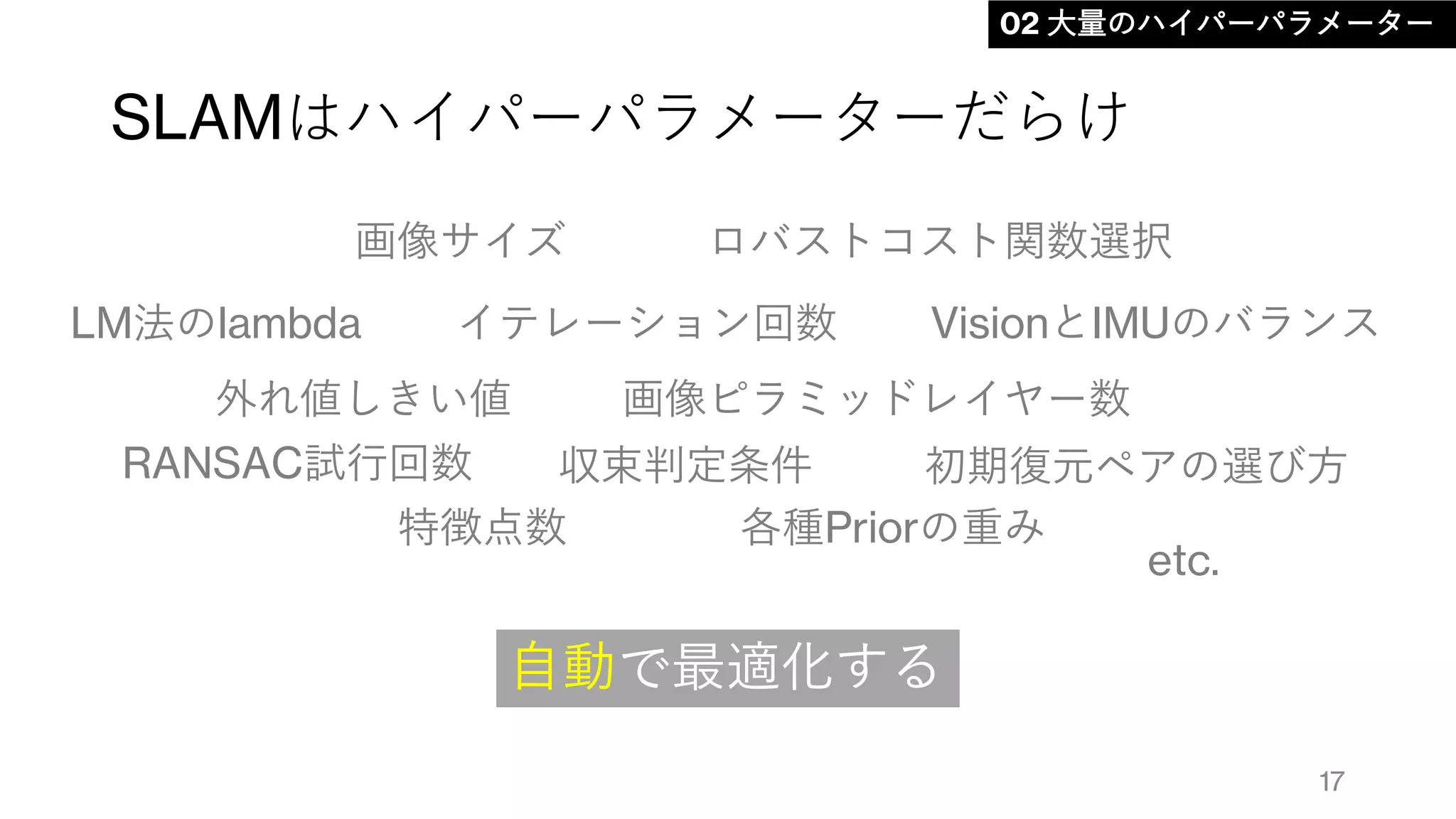
17.
SLAMはハイパーパラメーターだらけ 画像サイズ 特徴点数 イテレーション回数LM法のlambda 外れ値しきい値 画像ピラミッドレイヤー数 ロバストコスト関数選択 各種Priorの重み VisionとIMUのバランス 初期復元ペアの選び方RANSAC試行回数 収束判定条件 自動で最適化する 02
大量のハイパーパラメーター 17 etc.
18.
18 出典:https://github.com/optuna/optuna 02 大量のハイパーパラメーター
19.
import optuna from subprocess
import run def objective(trial): threshold = trial.suggest_uniform('threshold', 0.1, 10.0) iter = trial.suggest_int('iter', 50, 300) score = run( ['your/slam/binary', f'{threshold}', f'{iter}'], capture_output=True, text=True).stdout return score study = optuna.create_study() study.optimize(objective, n_trials=100) 19 02 大量のハイパーパラメーター 探索するパラメーターの 種類と範囲を指定 SLAMを実行して 評価結果を返す 公式ドキュメントや講演資料を参照 • https://optuna.readthedocs.io/ • https://www.slideshare.net/pfi/pydatatokyo-meetup-21-optuna
20.
1. 復元から評価まで自動化する 2. 最大(小)化したい評価指標を定義 20 02
大量のハイパーパラメーター 実績:手動調整より10%向上
21.
まとめ ハイパーパラメーターの調整は自動化できる 課題 • 評価指標をどう定義するか? 21 02 大量のハイパーパラメーター
22.
テストしにくい POINT 03 22
23.
モジュールの結合度が高くなりがち 23 03 テストしにくい 画像出典:ORB-SLAM [TRO
2015]
24.
モジュールの結合度が高くなりがちで ユニットテストがしにくい = バグを発見できない 24 バグを減らすテクニックを併用する 03 テストしにくい
25.
バグを減らすテクニック 静的解析ツール・Sanitizer(省略) 代数計算ツール 継続的な性能のトラッキング 25 03 テストしにくい 𝝏𝒚 𝝏𝒙
26.
代数計算ツール SLAMではGauss-Newton法をよく使う = ヤコビ行列を書く必要がある 26 03 テストしにくい 𝑟
𝑥 = 𝑦 − 𝑓 𝑥 J = 𝜕𝑟 𝑥 𝜕𝑥 𝑥 ← 𝑥 − JT J −1 JT 𝑟 𝑥
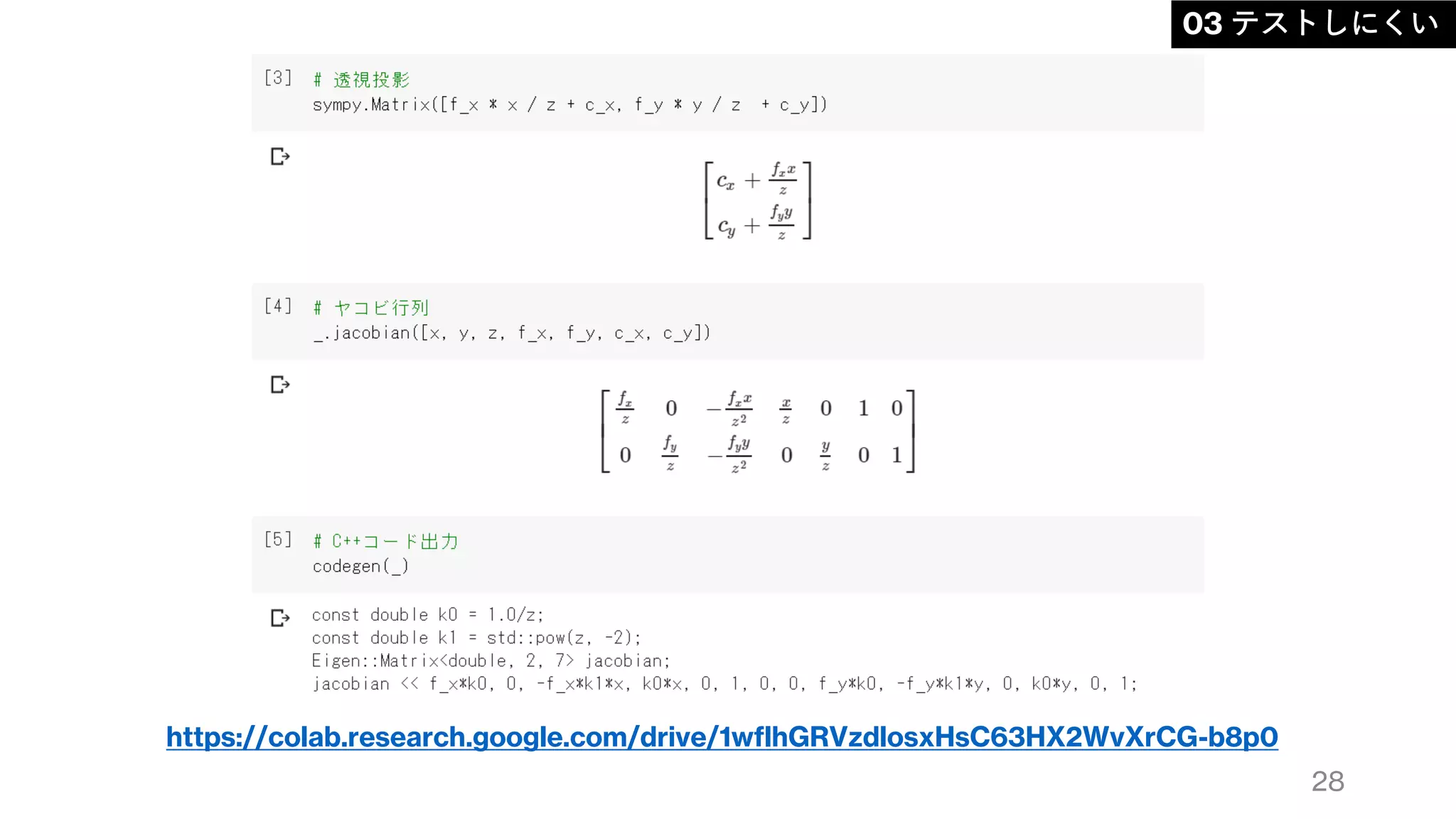
27.
27 03 テストしにくい 微分計算を自動化 Octave Mathematica
MATLAB
28.
28 03 テストしにくい https://colab.research.google.com/drive/1wflhGRVzdlosxHsC63HX2WvXrCG-b8p0
29.
代数計算ツール まとめ 考慮できないものもある • リー群の群作用の偏微分 •
浮動小数点数の計算誤差 • SIMD 最終的には、手で書いた微分と数値微分の 計算結果が一致するかテストしている 29 03 テストしにくい
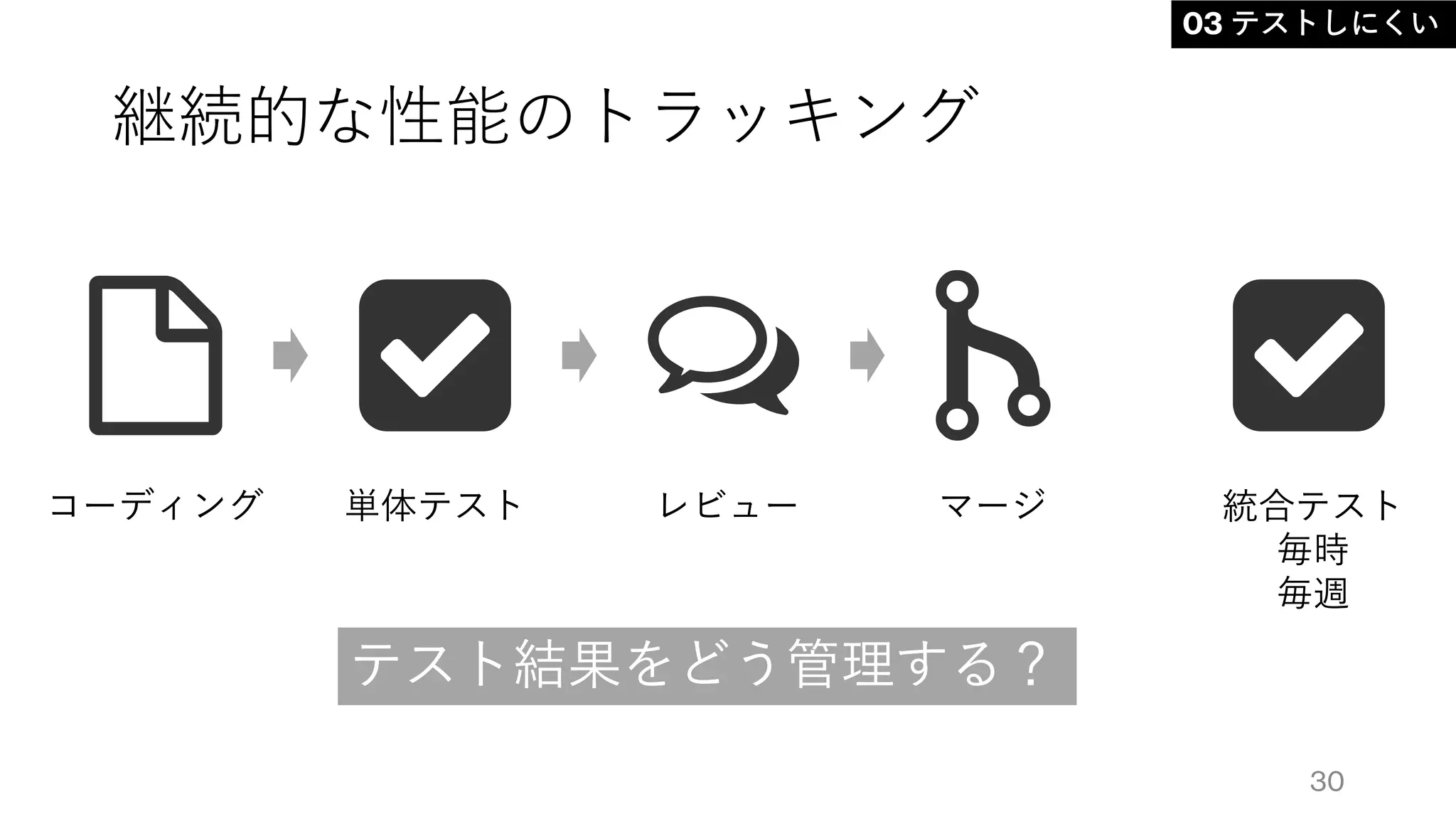
30.
継続的な性能のトラッキング 30 03 テストしにくい コーディング 単体テスト
レビュー マージ 統合テスト 毎時 毎週 テスト結果をどう管理する?
31.
31 03 テストしにくい 出典:https://github.com/mlflow/mlflow
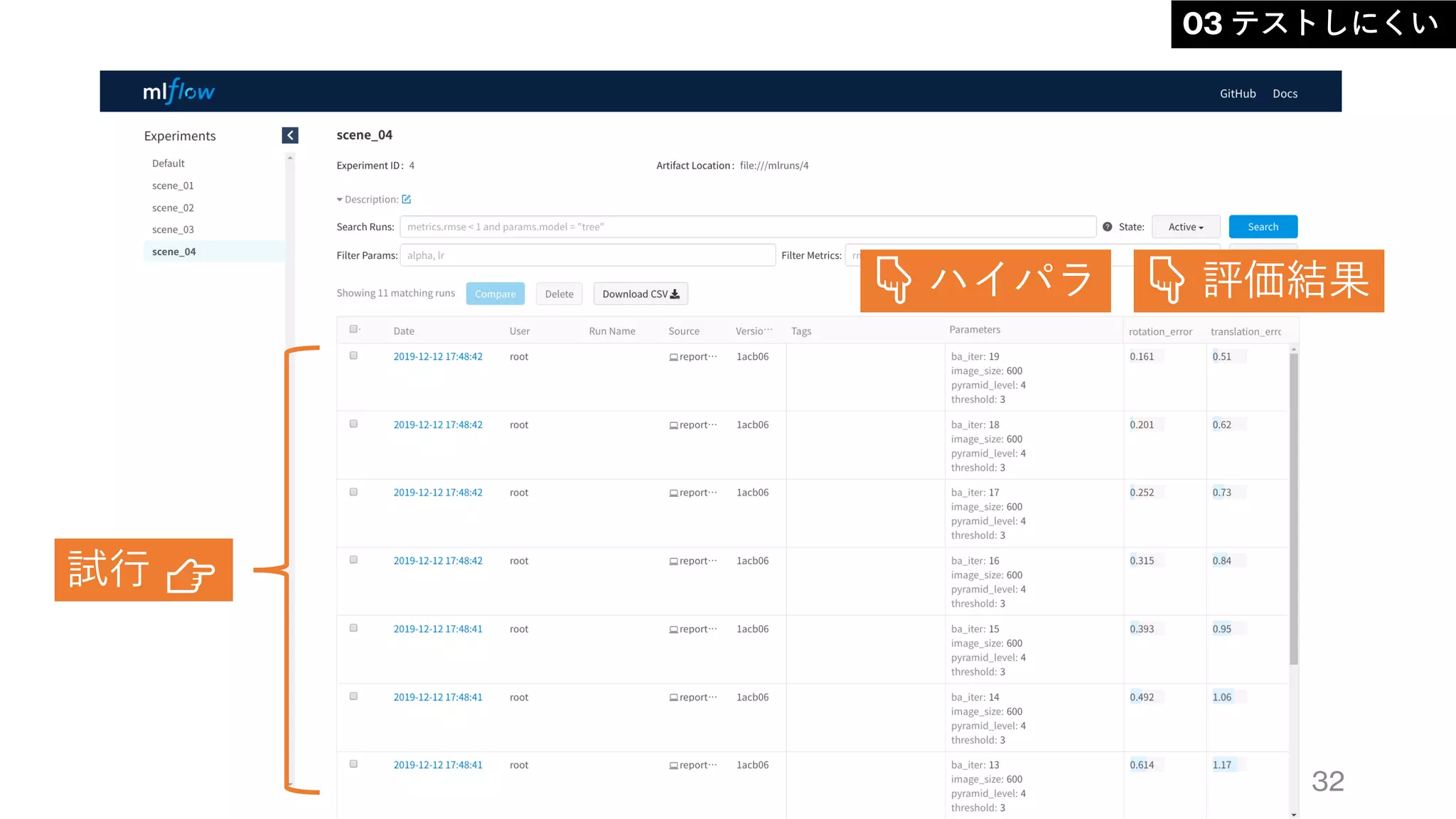
32.
32 03 テストしにくい 👇 ハイパラ
👇 評価結果 試行 👉
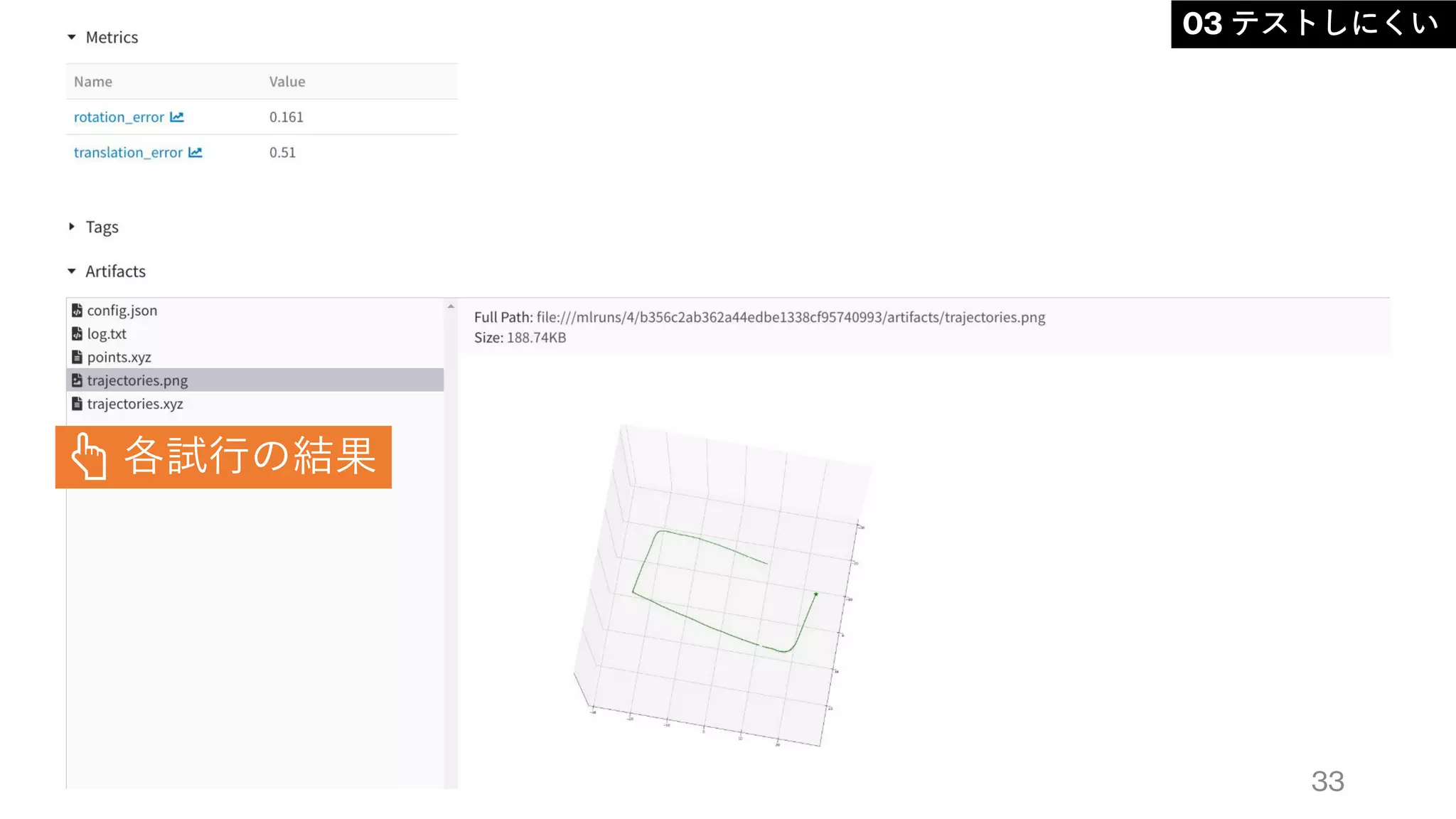
33.
33 03 テストしにくい 👆 各試行の結果
34.
34 03 テストしにくい 👇 ハイパラ
vs. 評価結果
35.
まとめ 積極的に自動化してバグが混入する余地を減らす 混入してもすぐに検出できるシステムを構築する 35 03 テストしにくい
36.
SLAMの開発はつらいが 軽減する方法はある 楽しくSLAM開発! 36
37.
参考文献 • The KITTI
Vision Benchmark Suite http://www.cvlibs.net/datasets/kitti/ • The EuRoC MAV Dataset https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets • RGB-D SLAM Dataset and Benchmark https://vision.in.tum.de/data/datasets/rgbd-dataset • The ICL-NUIM dataset https://www.doc.ic.ac.uk/~ahanda/VaFRIC/iclnuim.html • LiDAR Comparison Chart https://autonomoustuff.com/lidar-chart/ 37
Download

![データセット例 1/2
KITTI [IJRR 2013]
屋外、ステレオ、
LiDAR、GPS、IMU
EuRoC [IJRR 2016]
屋内、ステレオ、IMU、
モーションキャプチャ、
レーザースキャナ
01 真値が取れない
9
画像は論文またはプロジェクトページから引用](https://image.slidesharecdn.com/problemsandsolutionsforslamdevelopment-191215161142/75/SLAM-9-2048.jpg)
![データセット例 2/2
TUM RGB-D [IROS 2012]
屋内、RGB-D、
モーションキャプチャ
ICL-NUIM [ICRA 2014]
屋内、CG
01 真値が取れない
10
画像は論文またはプロジェクトページから引用](https://image.slidesharecdn.com/problemsandsolutionsforslamdevelopment-191215161142/75/SLAM-10-2048.jpg)
![import optuna
from subprocess import run
def objective(trial):
threshold = trial.suggest_uniform('threshold', 0.1, 10.0)
iter = trial.suggest_int('iter', 50, 300)
score = run(
['your/slam/binary', f'{threshold}', f'{iter}'],
capture_output=True, text=True).stdout
return score
study = optuna.create_study()
study.optimize(objective, n_trials=100)
19
02 大量のハイパーパラメーター
探索するパラメーターの
種類と範囲を指定
SLAMを実行して
評価結果を返す
公式ドキュメントや講演資料を参照
• https://optuna.readthedocs.io/
• https://www.slideshare.net/pfi/pydatatokyo-meetup-21-optuna](https://image.slidesharecdn.com/problemsandsolutionsforslamdevelopment-191215161142/75/SLAM-19-2048.jpg)

![モジュールの結合度が高くなりがち
23
03 テストしにくい
画像出典:ORB-SLAM [TRO 2015]](https://image.slidesharecdn.com/problemsandsolutionsforslamdevelopment-191215161142/75/SLAM-23-2048.jpg)
















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)























