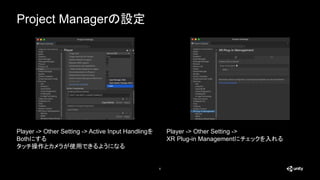
Project Managerの設定
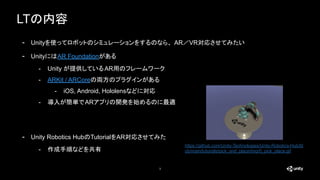
6
Player ->Other Setting -> Active Input Handlingを
Bothにする
タッチ操作とカメラが使用できるようになる
Player -> Other Setting ->
XR Plug-in Managementにチェックを入れる
URDF Importer assimp.dllエラー
10
Plugin'assimp.dll' is used from several
locations:Packages/com.unity.robotics.urdf-importer/Runtime/U
nityMeshImporter/Plugins/AssimpNet/Native/win/x86_64/assimp
.dll would be copied to <PluginPath>/assimp.dll
Packages/com.unity.robotics.urdf-importer/Runtime/UnityMeshI
mporter/Plugins/AssimpNet/Native/win/x86/assimp.dll would be
copied to <PluginPath>/assimp.dll
Please fix plugin settings and try again
削除
URDF Importer のassimp.dllを削除
iOSでビルドする際には不要
その他エラー
Pick_and_Place_Project -> Asset -> DemoScripts -> Demo.cs
を削除
11.
11
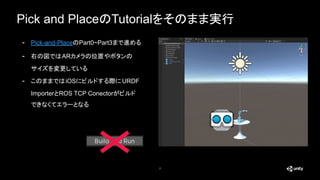
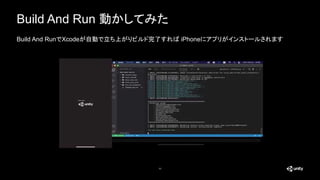
Build And Run動かしてみた
Build And RunでXcodeが自動で立ち上がりビルド完了すれば iPhoneにアプリがインストールされます