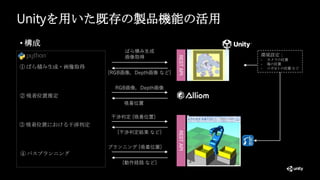
2020年度のUnity道場ロボティクススペシャルでは,産業用ロボットにおけるUnityとAI技術の活用事例について,私たちの実際の取り組みを例として紹介しました.今回は,その周辺技術として,ロボットの動作計画を例に,産業分野向けに従来開発してきた既存アセットをUnityへ活用する事例についてご紹介します.

![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-5-320.jpg)
![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-6-320.jpg)
![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-7-320.jpg)
![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-8-320.jpg)
![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-9-320.jpg)
![導入①:ばら積みピッキング
• Unity道場 ロボティクススペシャル 虎の巻[1]
[1] Unity Japan, https://www.youtube.com/watch?v=0N7ysSOJIgw (accessed 2021/10/18).](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-10-320.jpg)
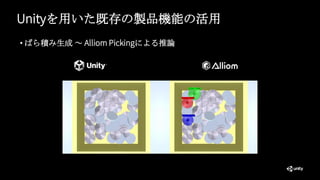
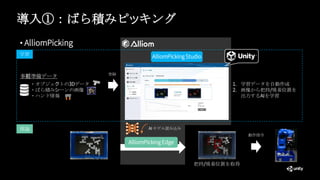
![導入①:ばら積みピッキング
• AlliomPicking
• Unity道場 ロボティクススペシャル(2020年)での
講演内容は2021年より“AlliomPicking”として製品化
[2] 安川電機 e –メカサイト, https://www.youtube.com/watch?v=s3kHYTkDVNI (accessed 2021/10/18).
[3] 日経クロステック, https://xtech.Nikkei.com/atcl/nxt/mag/rob/18/012600001/00071/ (accessed 2021/10/18).
2019国際ロボット展(iREX2019)[2] 日経Robotics (2021/3月号)[3]](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-11-320.jpg)

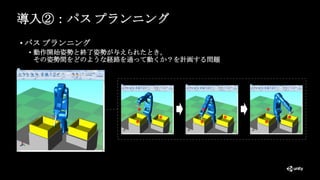
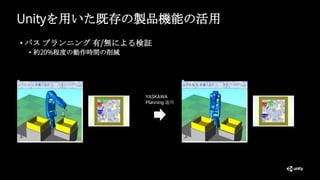
![導入②:パス プランニング
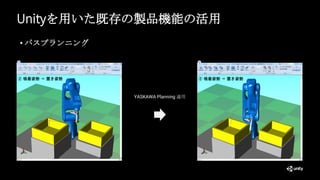
• パス プランニング
[4] 安川電機, https://www.yaskawa.co.jp/newsrelease/technology/16564 (accessed 2021/10/18).
[5] 安川電機 e –メカサイト, https://www.youtube.com/watch?v=rfG-RUPt-HE (accessed 2021/10/18).
YASKAWA Planning
(左図:バイオメディカルロボットシステム[4],右図:異常時のライン復旧動作(6倍速,一部改変)[5])](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-15-320.jpg)
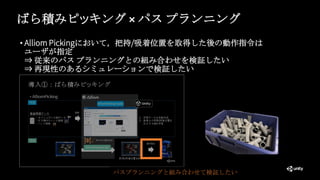
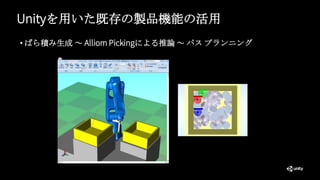
![ばら積みピッキング × パス プランニング
• 製品として提供されている既存のプランニング機能を組み合わせて
検証したいが,その機能が組み込まれているシミュレータでは,
動力学計算や画像取得が難しい・・・
• オブジェクトのばら積み状態の生成や画像取得が大変
[6] Yaskawa America, Inc., https://www.youtube.com/watch?v=WPFEEt8AeTQ&list=PLoQTh8O3tekKLMGU4_nlXrHV8uoZJdFz5&index=1 (accessed 2021/10/18).
MotoSim EG-VRC[6]](https://image.slidesharecdn.com/unityroboticslt20218-211115052122/85/Unity-17-320.jpg)