Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yoshitaka HARA
21,158 views
Cartographer を用いた 3D SLAM
第6回3D勉強会@関東「SLAM 勉強会」講演資料 https://3dvision.connpass.com/event/156241/
Technology
◦
Read more
19
Save
Share
Embed
Embed presentation
1
/ 28
2
/ 28
3
/ 28
4
/ 28
5
/ 28
6
/ 28
7
/ 28
8
/ 28
9
/ 28
10
/ 28
11
/ 28
12
/ 28
13
/ 28
14
/ 28
15
/ 28
16
/ 28
17
/ 28
18
/ 28
19
/ 28
20
/ 28
21
/ 28
Most read
22
/ 28
Most read
23
/ 28
Most read
24
/ 28
25
/ 28
26
/ 28
27
/ 28
28
/ 28
More Related Content
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
20190307 visualslam summary
by
Takuya Minagawa
PDF
Visual slam
by
Takuya Minagawa
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
PDF
20190825 vins mono
by
Takuya Minagawa
オープンソース SLAM の分類
by
Yoshitaka HARA
20190307 visualslam summary
by
Takuya Minagawa
Visual slam
by
Takuya Minagawa
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
SLAM入門 第2章 SLAMの基礎
by
yohei okawa
20190825 vins mono
by
Takuya Minagawa
What's hot
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
PPTX
SLAM勉強会(PTAM)
by
Masaya Kaneko
PPTX
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
PDF
tf,tf2完全理解
by
Koji Terada
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PDF
SLAM開発における課題と対策の一例の紹介
by
miyanegi
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
PDF
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
PDF
UnityとROSの連携について
by
UnityTechnologiesJapan002
PPTX
mcl_3dl: amcl並に軽量な3-D/6-DoFローカリゼーションパッケージ
by
Atsushi Watanabe
PPTX
確率ロボティクス第11回
by
Ryuichi Ueda
PDF
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
PDF
論文紹介 LexToMap: lexical-based topological mapping
by
Akira Taniguchi
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
SLAM勉強会(PTAM)
by
Masaya Kaneko
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
tf,tf2完全理解
by
Koji Terada
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
SLAM開発における課題と対策の一例の紹介
by
miyanegi
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
3次元レジストレーション(PCLデモとコード付き)
by
Toru Tamaki
UnityとROSの連携について
by
UnityTechnologiesJapan002
mcl_3dl: amcl並に軽量な3-D/6-DoFローカリゼーションパッケージ
by
Atsushi Watanabe
確率ロボティクス第11回
by
Ryuichi Ueda
3次元レジストレーションの基礎とOpen3Dを用いた3次元点群処理
by
Toru Tamaki
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
Autoware: ROSを用いた一般道自動運転向けソフトウェアプラットフォーム
by
Takuya Azumi
論文紹介 LexToMap: lexical-based topological mapping
by
Akira Taniguchi
Similar to Cartographer を用いた 3D SLAM
PPTX
Direct Sparse Odometryの解説
by
Masaya Kaneko
PPTX
ORB-SLAMの手法解説
by
Masaya Kaneko
PDF
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PPTX
CNN-SLAMざっくり
by
EndoYuuki
PPTX
3Dマップを活用したVisual Localization
by
Hajime Taira
PDF
Visual-SLAM技術を利用した 果樹園の3次元圃場地図の作成
by
Masahiro Tsukano
PPTX
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
PDF
SLAMチュートリアル大会 Direct Sparse Odometry 紹介
by
KenTakaki
PDF
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
PPTX
Robot frontier lesson3 2018
by
Ryuichi Ueda
PDF
伊能社中 地図研修会【入門編】【初級編】
by
Hiroaki Sengoku
PDF
5.総合演習(2)
by
openrtm
ODP
オープンキャンパススライド2017
by
robo_lab
PDF
Shogo Yamazaki Bachelor Thesis
by
pflab
PDF
201111 05
by
openrtm
PDF
Robust Vehicle Localization in Urban Environments Using Probabilistic Maps
by
Kitsukawa Yuki
PPTX
[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...
by
Deep Learning JP
PDF
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
PDF
Robotpaper.Challenge 2019-09 ver2
by
robotpaperchallenge
Direct Sparse Odometryの解説
by
Masaya Kaneko
ORB-SLAMの手法解説
by
Masaya Kaneko
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
CNN-SLAMざっくり
by
EndoYuuki
3Dマップを活用したVisual Localization
by
Hajime Taira
Visual-SLAM技術を利用した 果樹園の3次元圃場地図の作成
by
Masahiro Tsukano
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
SLAMチュートリアル大会 Direct Sparse Odometry 紹介
by
KenTakaki
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
Robot frontier lesson3 2018
by
Ryuichi Ueda
伊能社中 地図研修会【入門編】【初級編】
by
Hiroaki Sengoku
5.総合演習(2)
by
openrtm
オープンキャンパススライド2017
by
robo_lab
Shogo Yamazaki Bachelor Thesis
by
pflab
201111 05
by
openrtm
Robust Vehicle Localization in Urban Environments Using Probabilistic Maps
by
Kitsukawa Yuki
[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...
by
Deep Learning JP
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
Robotpaper.Challenge 2019-09 ver2
by
robotpaperchallenge
Recently uploaded
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
Cartographer を用いた 3D SLAM
1.
Cartographer を用いた 3D SLAM 千葉工業大学
未来ロボット技術研究センター 原 祥尭(HARA, Yoshitaka) 3D勉強会 2019-12-15 @ystk_hara
2.
自己紹介(略歴) 1 3D勉強会 2019-12-15 2007年:筑波大 油田・坪内・大矢研
修士 2007年~2011年:日立製作所 日立研究所 (旧、機械研究所) 2012年~2015年:学振特別研究員DC1 2015年:筑波大 坪内・大矢研 博士 2015年~:千葉工大 未来ロボット技術研究センター(fuRo) 北陽電機さまと共同開発 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
3.
自己紹介(ROS 解説) 2 3D勉強会 2019-12-15 “ROS
の活用による屋外の歩行者空間に適応した自律移動ロボットの開発”, RSJ 第94回ロボット工学セミナー, 2015. https://www.slideshare.net/hara-y/ros-slam-navigation-rsj-seminar “ROS を用いた自律移動ロボットのシステム構築”, RSJ 第99回ロボット工学セミナー, 2016. https://www.slideshare.net/hara-y/ros-nav-rsj-seminar “解説:ROS を用いた自律走行”, 日本ロボット学会誌, vol. 35, no. 4, 2017. https://www.jstage.jst.go.jp/article/jrsj/35/4/35_35_286/_article/-char/ja/ 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
4.
自己紹介(SLAM 解説) 3 3D勉強会 2019-12-15 日経
Robotics 連載 “SLAM とは何か”, 全18回, 2016~2017. “SLAM とは何か:自己位置推定と地図構築の全体像”, RSJ セミナー, 2018. “ロボティクスにおける SLAM 手法と実用化例”, SSII OS, 2019. https://www.slideshare.net/hara-y/slam-ssii-os-2019 “SLAM の基礎とオープンソース”, RSJ セミナー, 2019. https://www.slideshare.net/hara-y/slam-rsj-seminar-2019 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
5.
各種の SLAM アプローチ4 3D勉強会
2019-12-15
6.
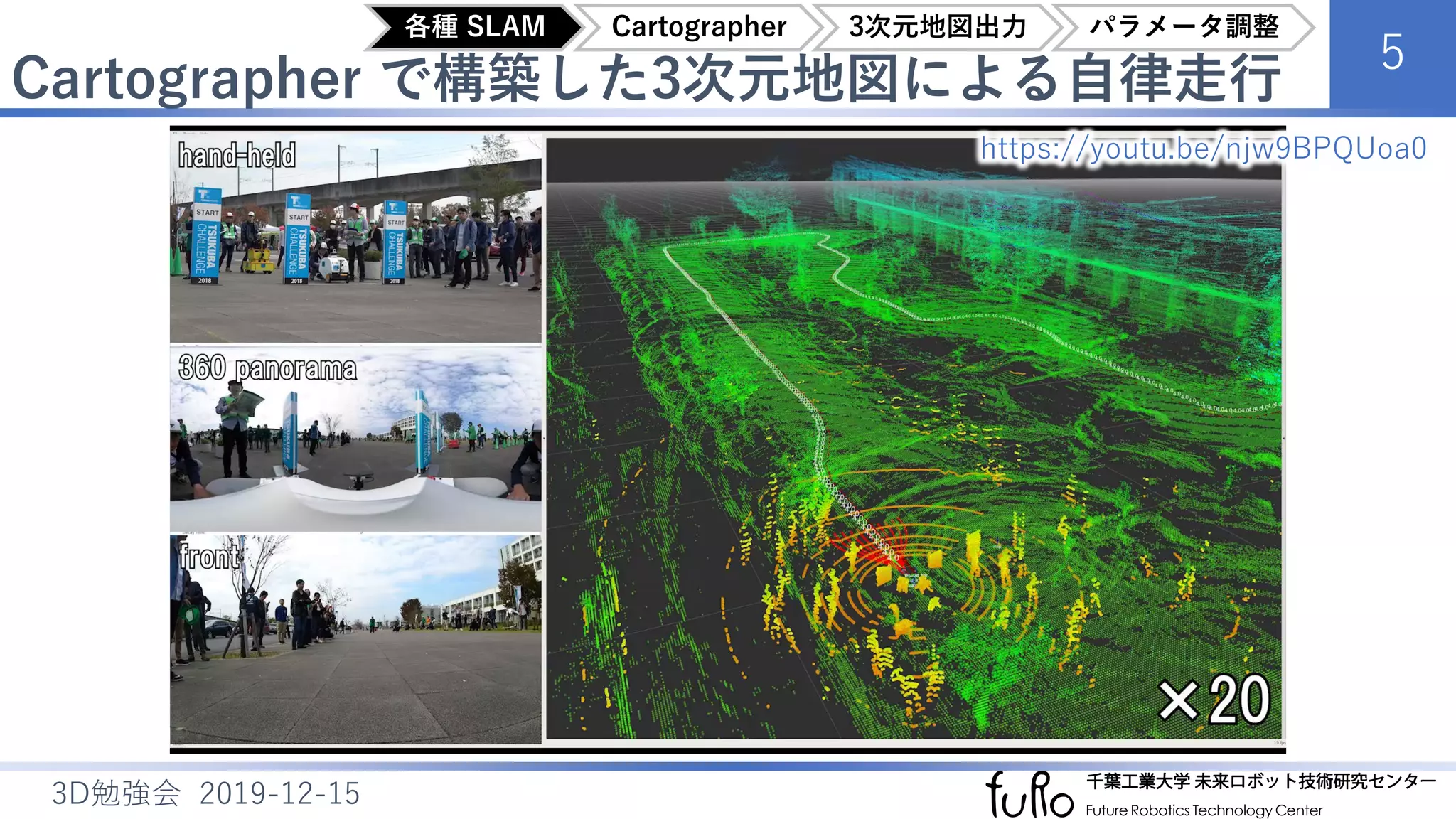
Cartographer で構築した3次元地図による自律走行 5 3D勉強会 2019-12-15 https://youtu.be/njw9BPQUoa0 各種
SLAM Cartographer 3次元地図出力 パラメータ調整
7.
つくばチャレンジ全チームの SLAM アプローチ 6 3D勉強会
2019-12-15 Laser SLAM が圧倒的多数、 ただグラフベースはまだ少ない RGB-D、Visual SLAM は少数、 屋外リアルワールドは難しい SLAM 不使用チームの戦略 オドメトリ地図で教示再生 GNSS(GPS など) トポロジカル地図 End-to-End 深層学習 13 25 8 2 2 15 0 5 10 15 20 25 30 Laser スキャンマッチング Laser ベイズフィルタ Laser グラフベース SLAM RGB-D SLAM Visual SLAM SLAM 不使用 その他の統計は [原+, “つくばチャレンジ2018技術調査アンケートの報告”] を参照 https://www.slideshare.net/hara-y/tsukuba-challenge-2018-survey 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
8.
自律走行や SLAM のオープンソース利用状況 7 3D勉強会
2019-12-15 ROS で標準的な navigation と slam_gmapping が多い Autoware も多い Cartographer は意外に少ない (試用して諦めたとの声も) 製品である Stencil の利用も Visual SLAM は RTAB-Map と ORB-SLAM のみで少ない 18 20 1 1 8 2 1 1 2 1 0 5 10 15 20 25 ROS navigation ROS slam_gmapping ROS hector_slam ROS slam_karto Autoware Cartographer MRPT Kaarta Stencil RTAB-Map ORB-SLAM その他の統計は [原+, “つくばチャレンジ2018技術調査アンケートの報告”] を参照 https://www.slideshare.net/hara-y/tsukuba-challenge-2018-survey 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
9.
オープンソース Laser SLAM
の比較 8 3D勉強会 2019-12-15 上記以外にも数多くの手法が存在する ループ検出とグラフ最適化によるループ閉じ込みが、特に広大な環境において重要 [友納, 原, “SLAM の現状と今後の展望”, システム制御情報学会誌, 2020] Laser SLAM (LIDAR SLAM) と Visual SLAM (Camera SLAM) の全体像を解説 分類 次元 地図形式 スキャン歪み 対策 ループ検出 グラフ最適化 GMapping RBPF 2D 占有格子 × 非明示的 × Autoware (ndt_mapping) スキャン マッチング 3D 点群 × × × Velodyne SLAM スキャン マッチング 3D 点群 ○ × × LOAM スキャン マッチング 3D 点群 ○ × × Karto SLAM グラフベース 2D 占有格子 × 粗密探索 SPA Cartographer グラフベース 2D, 3D 占有格子 ○ 分枝限定法 Ceres Solver 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
10.
Cartographer を用いた SLAM9 3D勉強会
2019-12-15
11.
Cartographer のアルゴリズム概要 10 3D勉強会 2019-12-15
Voxel Filter 固定サイズで点群を間引き Adaptive Voxel Filter 最大サイズと最小点数で動的に間引き Local Scan Matching(逐次SLAM) Ceres スキャンマッチング/ 相関スキャンマッチングから選択 Ceres は初期位置からの局所マッチング Global Scan Matching(ループ検出) 相関スキャンマッチングで大域探索 Pose Adjustment(グラフ最適化) SPA でポーズ調整 拘束の外れ値はM推定で対処 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
12.
Cartographer は高性能だがハードルも高い 11 3D勉強会 2019-12-15 公式ドキュメント(順次更新されているが…) https://google-cartographer.readthedocs.io/en/latest/ https://google-cartographer-ros.readthedocs.io/en/latest/ システムが複雑 コード行数:約6万行(約500ファイル) パラメータ数:約100個 パラメータ調整が難しい(開発者ら自身が以下のように説明) “アルゴリズム内部の十分な理解が必要で、パラメータ調整は本当に困難” 各種
SLAM Cartographer 3次元地図出力 パラメータ調整
13.
3次元 Cartographer のデフォルトパラメータで構築 12 3D勉強会
2019-12-15 占有格子地図の平行投影 大域的な整合性が破綻、 局所的にはそれなり 黄色のループ拘束がほぼ 生成されていない つくば市役所 研究学園駅前公園 再訪位置が同じ位置に マッピングされず、 ループが閉じていない 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
14.
パラメータ調整によるループ閉じ込みの実現 13 3D勉強会 2019-12-15 ループ拘束が適切 に生成されるよう パラメータ調整 3次元は処理負荷大、 3~24時間程度 (Core i7
8750H) 処理時間が長く、 試行錯誤は困難 →自動化したいが… つくば市役所 研究学園駅前公園 1,000 m 走行距離 6 km、約2時間走行 ループ閉じ込みによって 全体の整合性が取れている 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
15.
3次元点群地図の出力14 3D勉強会 2019-12-15
16.
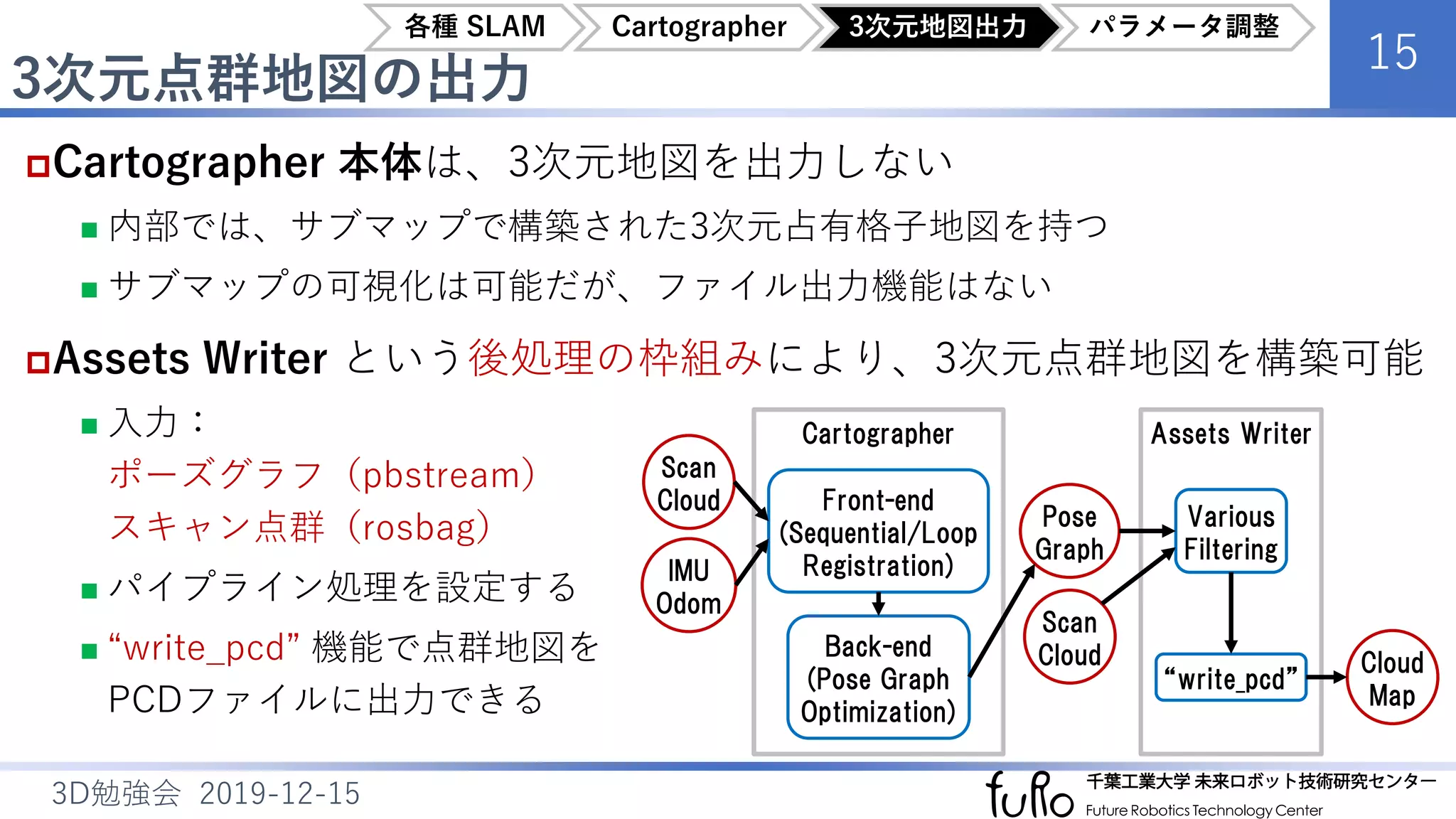
3次元点群地図の出力 15 3D勉強会 2019-12-15 Cartographer 本体は、3次元地図を出力しない
内部では、サブマップで構築された3次元占有格子地図を持つ サブマップの可視化は可能だが、ファイル出力機能はない Assets Writer という後処理の枠組みにより、3次元点群地図を構築可能 入力: ポーズグラフ(pbstream) スキャン点群(rosbag) パイプライン処理を設定する “write_pcd” 機能で点群地図を PCDファイルに出力できる Cartographer Assets Writer Front-end (Sequential/Loop Registration) Back-end (Pose Graph Optimization) Various Filtering “write_pcd” Scan Cloud IMU Odom Pose Graph Scan Cloud Cloud Map 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
17.
移動物体を除去するパイプラインを新たに追加 16 3D勉強会 2019-12-15 ボクセルを用いたバイナリベイズフィルタで移動物体を除去(新規実装) 生の点群地図には、歩行者や他ロボットなどの移動物体が残る 従来のバイナリベイズフィルタ では、地面も誤って消えてしまう →グリッド分割に伴う本質的問題 ビーム入射角を考慮したモデル により、地面の点群を適切に残す [AR, 2020
(accepted)] X, Y Z LIDAR hit (occupied) miss (free) unknown 地面はビームが浅い照射となるため、 多数のビームが通過して自由空間と誤判定される 側面図 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
18.
フィルタリングによる移動物体除去の比較 17 3D勉強会 2019-12-15 生の点群 頻度占有モデル(従来手法) ベイズ占有モデル(従来手法) 入射角を考慮したベイズ占有モデル 移動物体やノイズが含まれる 歩行者などの軌跡が残る 地面が消えてしまい、ノイズは残ってしまう 移動物体は消えるが、地面も消えてしまう 移動物体が消え、地面は残る [AR, 2020
(accepted)] 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
19.
Cartographer を利用して構築した3次元地図 18 3D勉強会 2019-12-15 colored
by intensity 自動で地図構築、手動での修正なし ビーム入射角を考慮した移動物体除去 [AR, 2020 (accepted)] 受光強度で地面の舗装/芝生/白線などを区別できる つくば市役所 研究学園駅前公園 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
20.
Cartographer のパラメータ調整19 3D勉強会 2019-12-15
21.
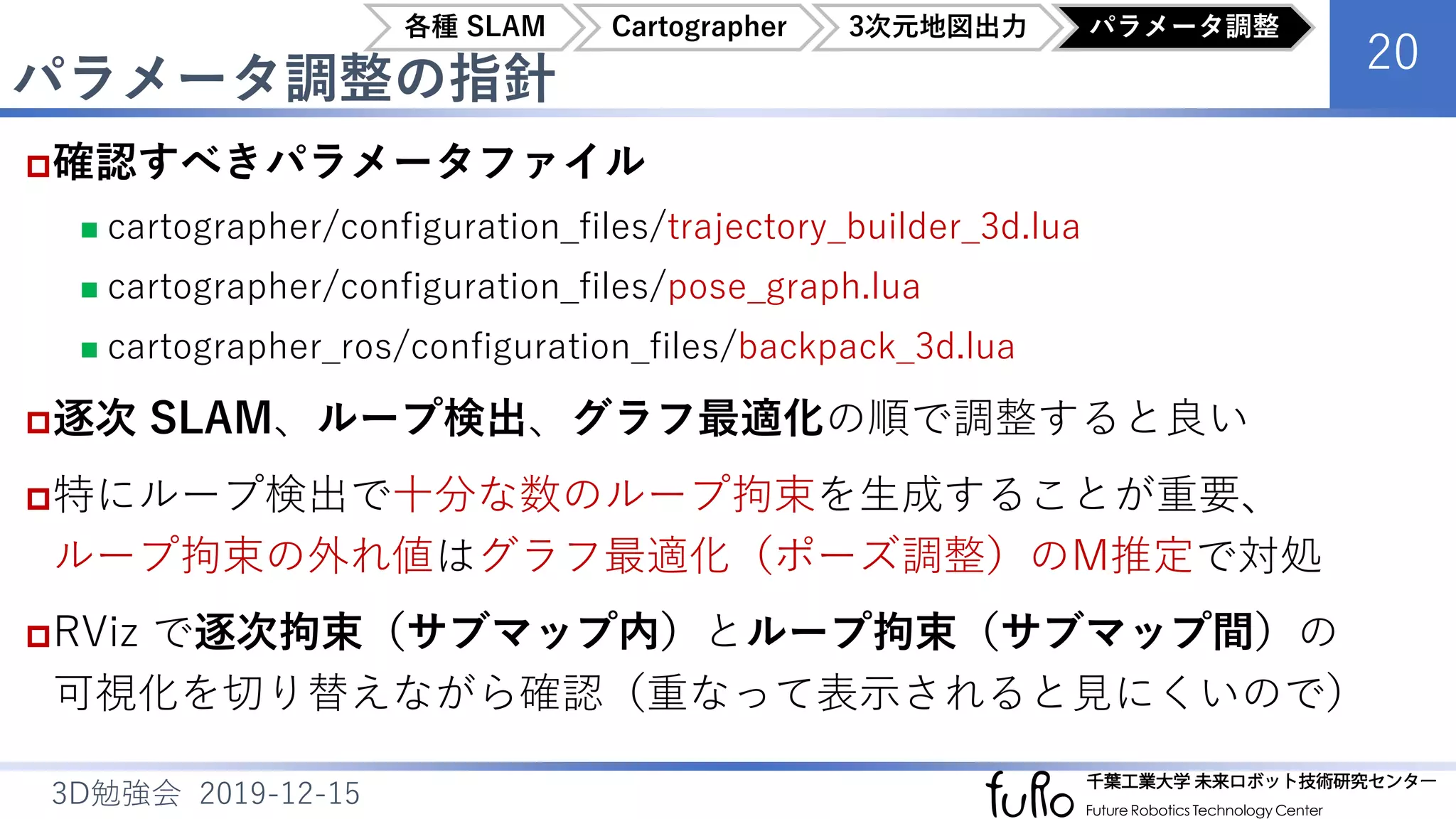
パラメータ調整の指針 20 3D勉強会 2019-12-15 確認すべきパラメータファイル cartographer/configuration_files/trajectory_builder_3d.lua
cartographer/configuration_files/pose_graph.lua cartographer_ros/configuration_files/backpack_3d.lua 逐次 SLAM、ループ検出、グラフ最適化の順で調整すると良い 特にループ検出で十分な数のループ拘束を生成することが重要、 ループ拘束の外れ値はグラフ最適化(ポーズ調整)のM推定で対処 RViz で逐次拘束(サブマップ内)とループ拘束(サブマップ間)の 可視化を切り替えながら確認(重なって表示されると見にくいので) 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
22.
各パラメータの説明(センサ関連) 21 3D勉強会 2019-12-15 TRAJECTORY_BUILDER_3D.min/max_range TRAJECTORY_BUILDER_3D.high/low_resolution_adaptive_voxel_filter.max_range LIDAR
の仕様をベースに調整、ただし high_resolution を長くすると処理が重い TRAJECTORY_BUILDER_3D.voxel_filter_size 後述の submaps.high_resolution と整合するように調整 TRAJECTORY_BUILDER_3D.num_accumulated_range_data(スキャン歪み対策) LIDAR 点群のスキャン分割に合わせて調整、全周スキャン点群ごとに配信の場合は“1”、 センサハンドラでのスキャン分割(全周ごとではなく分割して配信)が必要 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
23.
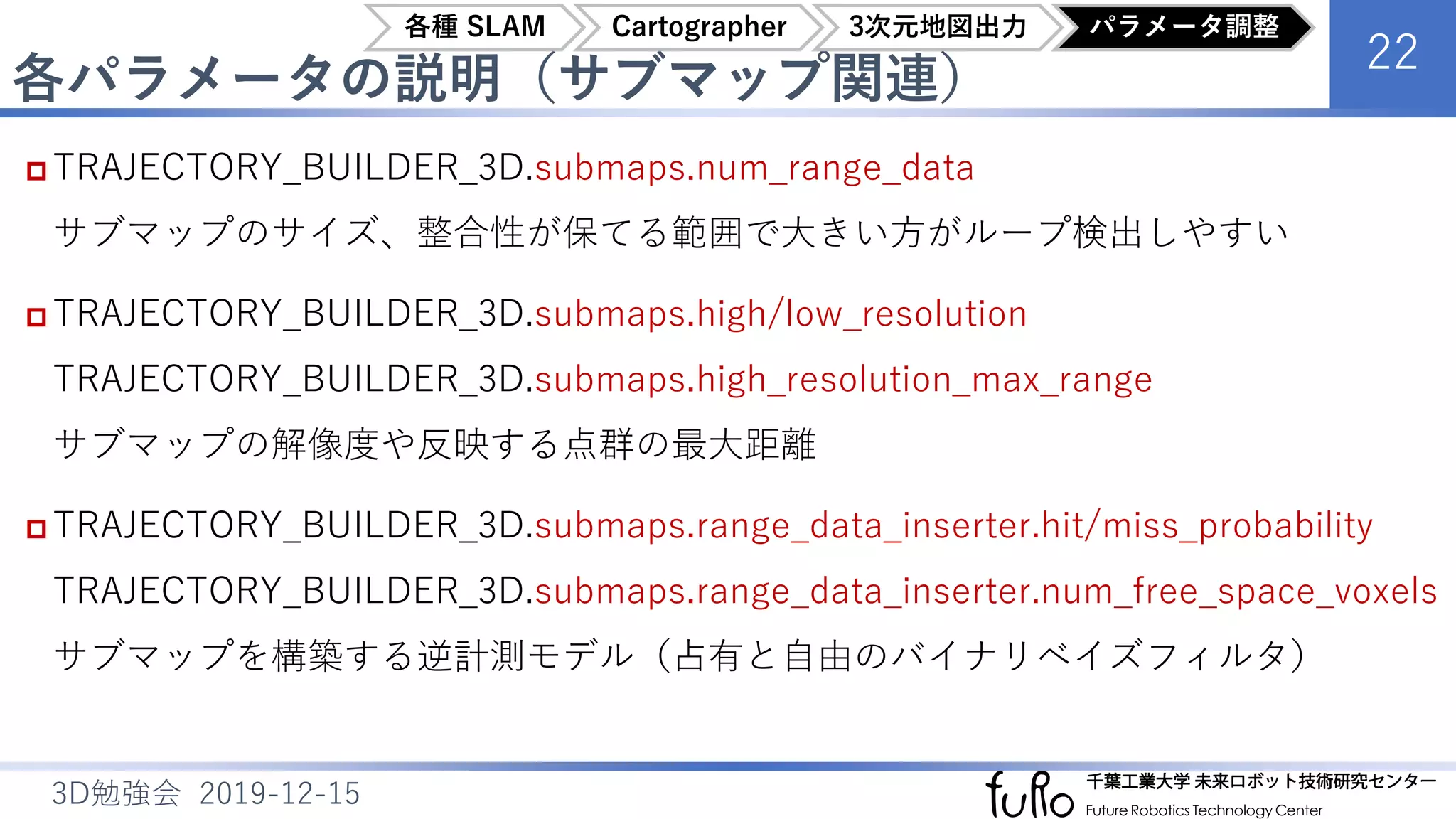
各パラメータの説明(サブマップ関連) 22 3D勉強会 2019-12-15 TRAJECTORY_BUILDER_3D.submaps.num_range_data サブマップのサイズ、整合性が保てる範囲で大きい方がループ検出しやすい
TRAJECTORY_BUILDER_3D.submaps.high/low_resolution TRAJECTORY_BUILDER_3D.submaps.high_resolution_max_range サブマップの解像度や反映する点群の最大距離 TRAJECTORY_BUILDER_3D.submaps.range_data_inserter.hit/miss_probability TRAJECTORY_BUILDER_3D.submaps.range_data_inserter.num_free_space_voxels サブマップを構築する逆計測モデル(占有と自由のバイナリベイズフィルタ) 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
24.
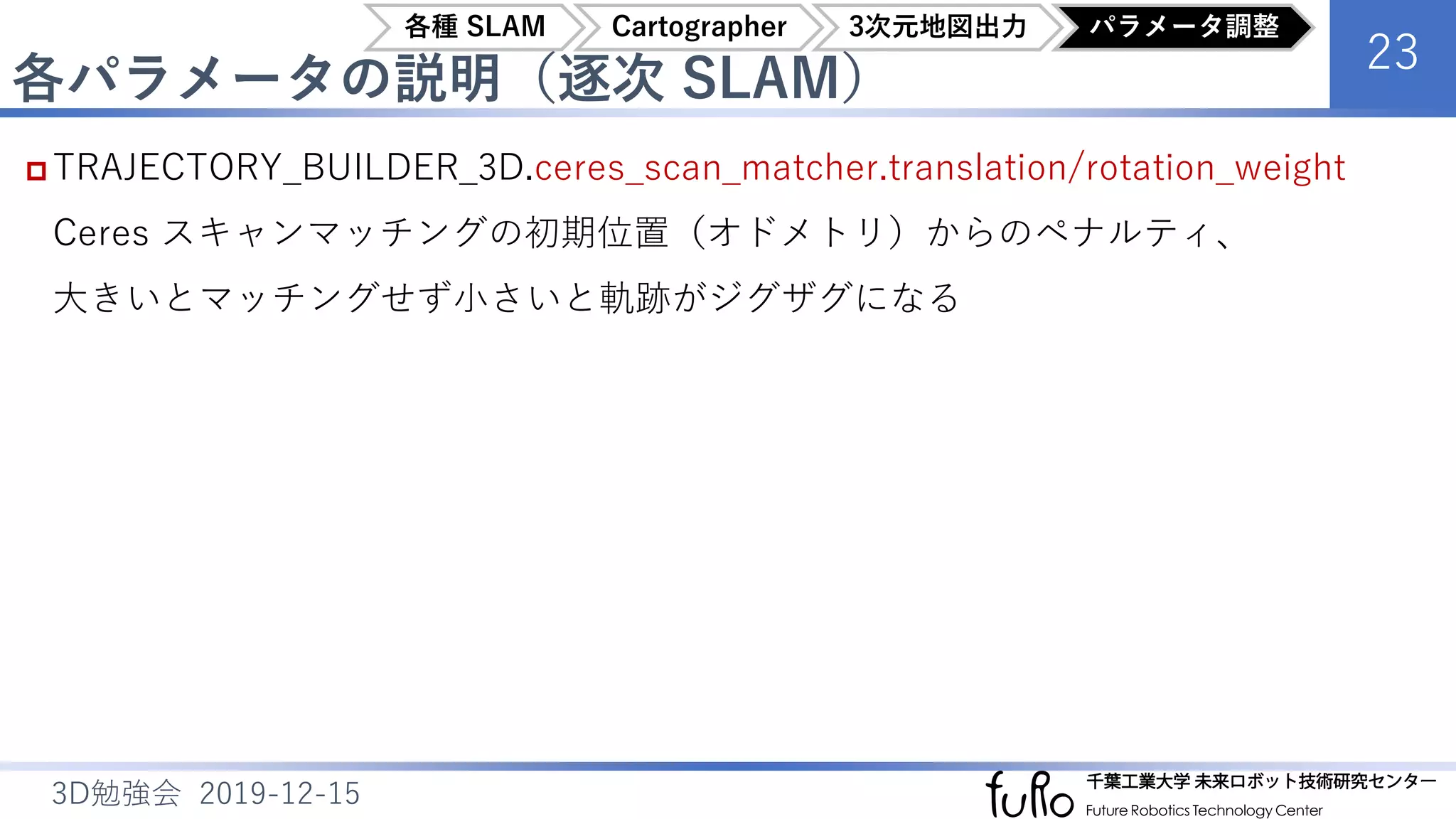
各パラメータの説明(逐次 SLAM) 23 3D勉強会 2019-12-15
TRAJECTORY_BUILDER_3D.ceres_scan_matcher.translation/rotation_weight Ceres スキャンマッチングの初期位置(オドメトリ)からのペナルティ、 大きいとマッチングせず小さいと軌跡がジグザグになる 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
25.
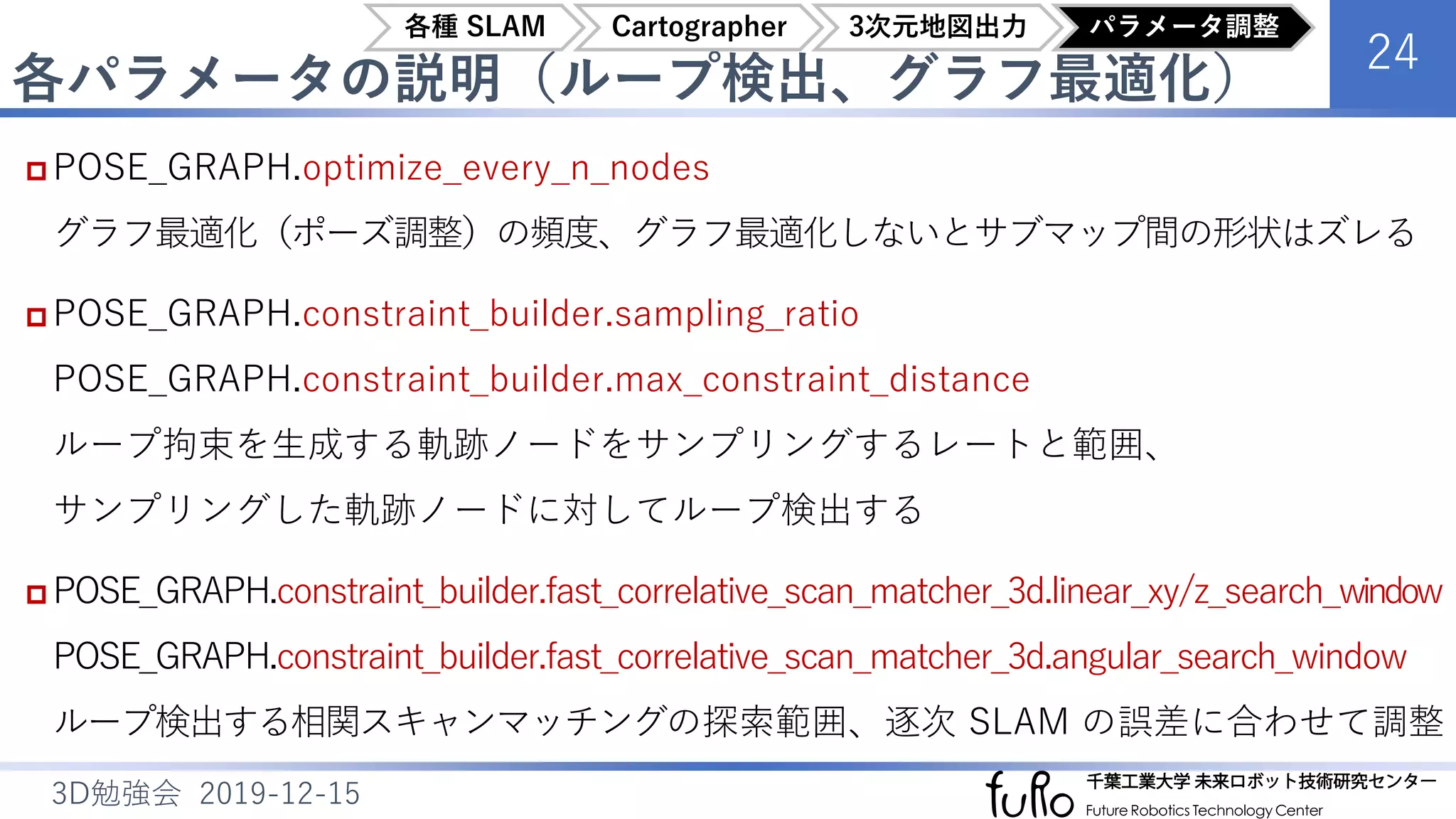
各パラメータの説明(ループ検出、グラフ最適化) 24 3D勉強会 2019-12-15 POSE_GRAPH.optimize_every_n_nodes グラフ最適化(ポーズ調整)の頻度、グラフ最適化しないとサブマップ間の形状はズレる
POSE_GRAPH.constraint_builder.sampling_ratio POSE_GRAPH.constraint_builder.max_constraint_distance ループ拘束を生成する軌跡ノードをサンプリングするレートと範囲、 サンプリングした軌跡ノードに対してループ検出する POSE_GRAPH.constraint_builder.fast_correlative_scan_matcher_3d.linear_xy/z_search_window POSE_GRAPH.constraint_builder.fast_correlative_scan_matcher_3d.angular_search_window ループ検出する相関スキャンマッチングの探索範囲、逐次 SLAM の誤差に合わせて調整 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
26.
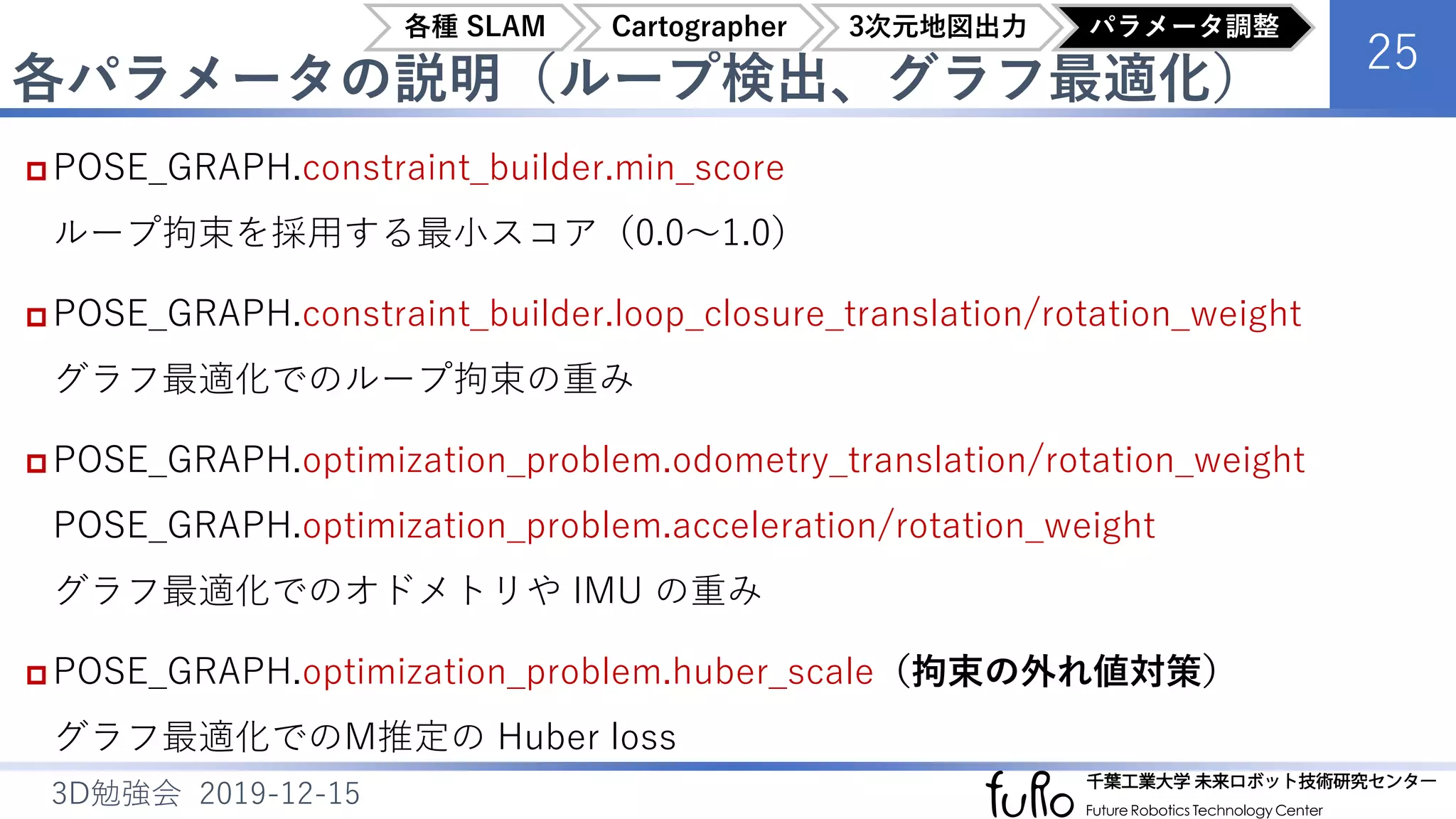
各パラメータの説明(ループ検出、グラフ最適化) 25 3D勉強会 2019-12-15 POSE_GRAPH.constraint_builder.min_score ループ拘束を採用する最小スコア(0.0~1.0)
POSE_GRAPH.constraint_builder.loop_closure_translation/rotation_weight グラフ最適化でのループ拘束の重み POSE_GRAPH.optimization_problem.odometry_translation/rotation_weight POSE_GRAPH.optimization_problem.acceleration/rotation_weight グラフ最適化でのオドメトリや IMU の重み POSE_GRAPH.optimization_problem.huber_scale(拘束の外れ値対策) グラフ最適化でのM推定の Huber loss 各種 SLAM Cartographer 3次元地図出力 パラメータ調整
27.
まとめ26 3D勉強会 2019-12-15
28.
まとめ 27 3D勉強会 2019-12-15 つくばチャレンジ全チームの SLAM
アプローチの統計 →屋外リアルワールドでは、現状は Laser SLAM の方が強力 オープンソース Laser SLAM の比較 3次元 Cartographer を用いた地図構築の実例 Assets Writer の後処理による、3次元点群地図の出力 ビーム入射角を考慮したバイナリベイズフィルタによる移動物体除去 Cartographer のパラメータ調整ノウハウ 各種 SLAM Cartographer 3次元地図出力 パラメータ調整




![つくばチャレンジ全チームの SLAM アプローチ
6
3D勉強会 2019-12-15
Laser SLAM が圧倒的多数、
ただグラフベースはまだ少ない
RGB-D、Visual SLAM は少数、
屋外リアルワールドは難しい
SLAM 不使用チームの戦略
オドメトリ地図で教示再生
GNSS(GPS など)
トポロジカル地図
End-to-End 深層学習
13
25
8
2
2
15
0 5 10 15 20 25 30
Laser スキャンマッチング
Laser ベイズフィルタ
Laser グラフベース SLAM
RGB-D SLAM
Visual SLAM
SLAM 不使用
その他の統計は [原+, “つくばチャレンジ2018技術調査アンケートの報告”] を参照
https://www.slideshare.net/hara-y/tsukuba-challenge-2018-survey
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-7-2048.jpg)
![自律走行や SLAM のオープンソース利用状況
7
3D勉強会 2019-12-15
ROS で標準的な navigation と
slam_gmapping が多い
Autoware も多い
Cartographer は意外に少ない
(試用して諦めたとの声も)
製品である Stencil の利用も
Visual SLAM は RTAB-Map
と ORB-SLAM のみで少ない
18
20
1
1
8
2
1
1
2
1
0 5 10 15 20 25
ROS navigation
ROS slam_gmapping
ROS hector_slam
ROS slam_karto
Autoware
Cartographer
MRPT
Kaarta Stencil
RTAB-Map
ORB-SLAM
その他の統計は [原+, “つくばチャレンジ2018技術調査アンケートの報告”] を参照
https://www.slideshare.net/hara-y/tsukuba-challenge-2018-survey
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-8-2048.jpg)
![オープンソース Laser SLAM の比較
8
3D勉強会 2019-12-15
上記以外にも数多くの手法が存在する
ループ検出とグラフ最適化によるループ閉じ込みが、特に広大な環境において重要
[友納, 原, “SLAM の現状と今後の展望”, システム制御情報学会誌, 2020]
Laser SLAM (LIDAR SLAM) と Visual SLAM (Camera SLAM) の全体像を解説
分類 次元 地図形式
スキャン歪み
対策
ループ検出 グラフ最適化
GMapping RBPF 2D 占有格子 × 非明示的 ×
Autoware
(ndt_mapping)
スキャン
マッチング
3D 点群 × × ×
Velodyne
SLAM
スキャン
マッチング
3D 点群 ○ × ×
LOAM
スキャン
マッチング
3D 点群 ○ × ×
Karto SLAM グラフベース 2D 占有格子 × 粗密探索 SPA
Cartographer グラフベース 2D, 3D 占有格子 ○ 分枝限定法 Ceres Solver
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-9-2048.jpg)






![移動物体を除去するパイプラインを新たに追加
16
3D勉強会 2019-12-15
ボクセルを用いたバイナリベイズフィルタで移動物体を除去(新規実装)
生の点群地図には、歩行者や他ロボットなどの移動物体が残る
従来のバイナリベイズフィルタ
では、地面も誤って消えてしまう
→グリッド分割に伴う本質的問題
ビーム入射角を考慮したモデル
により、地面の点群を適切に残す
[AR, 2020 (accepted)] X, Y
Z
LIDAR
hit (occupied)
miss (free)
unknown
地面はビームが浅い照射となるため、
多数のビームが通過して自由空間と誤判定される
側面図
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-17-2048.jpg)
![フィルタリングによる移動物体除去の比較
17
3D勉強会 2019-12-15
生の点群
頻度占有モデル(従来手法)
ベイズ占有モデル(従来手法)
入射角を考慮したベイズ占有モデル
移動物体やノイズが含まれる
歩行者などの軌跡が残る
地面が消えてしまい、ノイズは残ってしまう
移動物体は消えるが、地面も消えてしまう
移動物体が消え、地面は残る
[AR, 2020 (accepted)]
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-18-2048.jpg)
![Cartographer を利用して構築した3次元地図
18
3D勉強会 2019-12-15
colored by intensity
自動で地図構築、手動での修正なし
ビーム入射角を考慮した移動物体除去
[AR, 2020 (accepted)]
受光強度で地面の舗装/芝生/白線などを区別できる
つくば市役所
研究学園駅前公園
各種 SLAM Cartographer 3次元地図出力 パラメータ調整](https://image.slidesharecdn.com/cartographer3dcvtech2019-191216103521/75/Cartographer-3D-SLAM-19-2048.jpg)


















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)






























![[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...](https://cdn.slidesharecdn.com/ss_thumbnails/differentiablemappingnetworks-200707033539-thumbnail.jpg?width=640&height=640&fit=bounds)







