Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
TK
Uploaded by
tomohiro kuwano
PDF, PPTX
3,789 views
リンク機構を有するロボットをGazeboで動かす
「Gazeboでリンク機構をシミュレーションする方法」について話しています。
Engineering
◦
Read more
5
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
Most read
8
/ 18
Most read
9
/ 18
Most read
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
tf,tf2完全理解
by
Koji Terada
PDF
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
UnityとROSの連携について
by
UnityTechnologiesJapan002
PDF
Point net
by
Fujimoto Keisuke
PDF
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
tf,tf2完全理解
by
Koji Terada
SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜
by
SSII
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
UnityとROSの連携について
by
UnityTechnologiesJapan002
Point net
by
Fujimoto Keisuke
Jetson活用セミナー ROS2自律走行実現に向けて
by
Fixstars Corporation
What's hot
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
Gazebo/ROSで力覚センサプラグインを使う
by
HDeanK
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
PDF
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
PPTX
報酬設計と逆強化学習
by
Yusuke Nakata
PDF
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
PDF
【Unity】 Behavior TreeでAIを作る
by
torisoup
PDF
MoveItの新機能、 pilz industrial motion を試してみた
by
Ryo Kabutan
PDF
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PPTX
確率ロボティクス第三回
by
Ryuichi Ueda
PDF
Visual slam
by
Takuya Minagawa
PDF
組み込み関数(intrinsic)によるSIMD入門
by
Norishige Fukushima
PDF
03 第3.6節-第3.8節 ROS2の基本機能(2/2)
by
Mori Ken
PDF
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PPTX
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PPTX
確率ロボティクス第五回
by
Ryuichi Ueda
PPTX
You Only Look One-level Featureの解説と見せかけた物体検出のよもやま話
by
Yusuke Uchida
オープンソース SLAM の分類
by
Yoshitaka HARA
Gazebo/ROSで力覚センサプラグインを使う
by
HDeanK
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
LiDAR点群と画像とのマッピング
by
Takuya Minagawa
報酬設計と逆強化学習
by
Yusuke Nakata
NDTスキャンマッチング 第1回3D勉強会@PFN 2018年5月27日
by
Kitsukawa Yuki
【Unity】 Behavior TreeでAIを作る
by
torisoup
MoveItの新機能、 pilz industrial motion を試してみた
by
Ryo Kabutan
20180527 ORB SLAM Code Reading
by
Takuya Minagawa
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
確率ロボティクス第三回
by
Ryuichi Ueda
Visual slam
by
Takuya Minagawa
組み込み関数(intrinsic)によるSIMD入門
by
Norishige Fukushima
03 第3.6節-第3.8節 ROS2の基本機能(2/2)
by
Mori Ken
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
確率ロボティクス第五回
by
Ryuichi Ueda
You Only Look One-level Featureの解説と見せかけた物体検出のよもやま話
by
Yusuke Uchida
リンク機構を有するロボットをGazeboで動かす
1.
@calm0815 2020/5/1 ROS Japan UG
#36 飛び込みLT 作成:@calm0815 リンク機構を有するロボットを Gazeboで動かす
2.
@calm0815 自己紹介 名前:桑野 僚大(Kuwano Tomohiro) 経歴: •
~ 2020/03 : 九州工業大学大学院 修士(制御工学) • 西田研究室:ソフトロボットグリッパの開発 • 学生フォーミュラ: 空力パーツの設計してみたり、シミュレータ(PCゲーム)作ってみたり • 2020/04 ~ : 自動車メーカ 生産技術開発本部 • 2020/04 ~ : 自宅待機&在宅勤務 Twitter : @calm0815 Github : calm0815 ➢ https://github.com/calm0815 「ROS、(文字通り)チョットワカル」位のユーザです。 趣味で回路くんだり、ROS触ったりしてます。
3.
@calm0815 Target: Gazeboでリンク機構を動かす Contents: 1. ROSからGazeboを起動するときの処理 2. URDFの欠点と,SDFを用いた対応策 3.
実際にやってみよう!
4.
@calm0815 .urdf ロボットの情報 • URDF[1]で記述 • 場合によっては XacroからURDFに変換 •
URDFをrosparamに登録 1. ROSからGazeboを起動するときの処理 [1] URDF XML Specifications:http://wiki.ros.org/urdf/XML .urdf 形式[spawn_urdf] .sdf 形式 Gazebo’s API : urdf2sdf Gazebo’s world convert 指令値など Joint角など Plugin: gazebo_ros_control
5.
@calm0815 1. ROSからGazeboを起動するときの処理 .urdf 形式[spawn_urdf] .sdf 形式 Gazebo’s API
: urdf2sdf Gazebo’s world convert 指令値など Joint角など Plugin: gazebo_ros_control URDFで表現できないロボットは Gazeboにスポーンさせることはできない (と,思われている) .urdf ロボットの情報 • URDF[1]で記述 • 場合によっては XacroからURDFに変換 • URDFをrosparamに登録 [1] URDF XML Specifications:http://wiki.ros.org/urdf/XML
6.
@calm0815 2. URDFの欠点と、SDFを用いた対応策 URDFで表現できないロボットって? ➢ よく指摘されるのが「リンク機構」を有するロボット 例)ETH
Zurich が開発した「Ascento」[2] [2] ASCENTO | Indoor Mobility Robot ETHZ, https://www.ascento.ethz.ch/ • 脚部にリンク機構を有している • “Hip Motor”が回転することで,ロボットは 屈伸動作を行う
7.
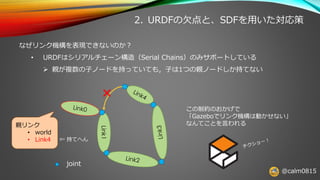
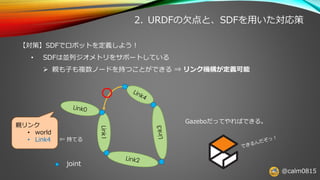
@calm0815 2. URDFの欠点と、SDFを用いた対応策 なぜリンク機構を表現できないのか? • URDFはシリアルチェーン構造(Serial
Chains)のみサポートしている ➢ 親が複数の子ノードを持っていても,子は1つの親ノードしか持てない Link1 × この制約のおかげで 「Gazeboでリンク機構は動かせない」 なんてことを言われる joint 親リンク • world • Link4 ⇐ 持てへん
8.
@calm0815 2. URDFの欠点と、SDFを用いた対応策 【対策】SDFでロボットを定義しよう! • SDFは並列ジオメトリをサポートしている ➢
親も子も複数ノードを持つことができる ⇒ リンク機構が定義可能 Link1 ○ Gazeboだってやればできる。 joint 親リンク • world • Link4 ⇐ 持てる
9.
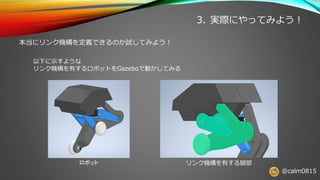
@calm0815 3. 実際にやってみよう! 本当にリンク機構を定義できるのか試してみよう! 以下に示すような リンク機構を有するロボットをGazeboで動かしてみる ロボット リンク機構を有する脚部
10.
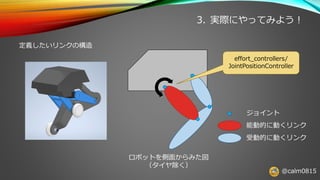
@calm0815 3. 実際にやってみよう! 定義したいリンクの構造 ロボットを側面からみた図 (タイヤ除く) 能動的に動くリンク 受動的に動くリンク effort_controllers/ JointPositionController ジョイント
11.
@calm0815 .urdf ロボットの情報 • URDF[1]で記述 • 場合によっては XacroからURDFに変換 •
URDFをrosparamに登録 .urdf 形式[spawn_urdf] .sdf 形式 Gazebo’s API : urdf2sdf Gazebo’s world convert 指令値など Joint角など Plugin: gazebo_ros_control × “URDFのみ”の起動方法 3. 実際にやってみよう! 使わない [1] URDF XML Specifications:http://wiki.ros.org/urdf/XML
12.
@calm0815[2]SDFormat Specifications:http://sdformat.org/spec?ver=1.7&elem=sdf 3. 実際にやってみよう! ロボットの情報 •
URDFとSDF[2]の両方を用意 ➢ URDFはROSが持つ情報 ➢ SDFはGazeboが持つ情報 • URDFをrosparamに登録 Gazebo’s world 指令値など Joint角など .sdf [spawn_model] “URDFとSDFを併用する”起動方法 How to spawn an SDF: https://www.theconstructsim.com/ gazebo-qa-003-spawn-sdf-custom- model-gazebo-ros/ Plugin: gazebo_ros_control
13.
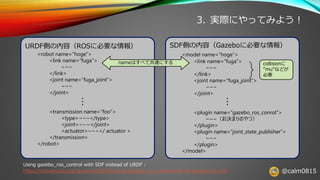
@calm0815 3. 実際にやってみよう! URDF側の内容(ROSに必要な情報) <robot name=“hoge”> <link
name=“fuga”> ~~~ </link> <joint name=“fuga_joint”> ~~~ </joint> <transmission name=“foo”> <type>~~~</type> <joint>~~~</joint> <actuator>~~~</ actuator > </transmission> </robot> SDF側の内容(Gazeboに必要な情報) <model name=“hoge”> <link name=“fuga”> ~~~ </link> <joint name=“fuga_joint”> ~~~ </joint> <plugin name=“gazebo_ros_conrol”> ~~~(お決まりのやつ) </plugin> <plugin name=“joint_state_publisher”> ~~~ </plugin> </model> ・・・ ・・・ nameはすべて共通にする collisionに ”mu”などが 必要 Using gazebo_ros_control with SDF instead of URDF: https://answers.ros.org/question/223196/using-gazebo_ros_control-with-sdf-instead-of-urdf/
14.
@calm0815 3. 実際にやってみよう! Watch this
movie on YouTube:https://www.youtube.com/watch?v=UJCQ8EBhfMk ROS Jointに指令値 Rvizで可視化 Gazebo リンクが動作 Joint角をROSへ フィードバック
15.
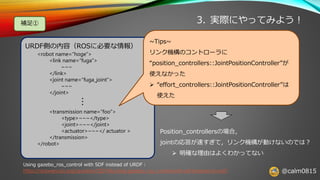
@calm0815 3. 実際にやってみよう! URDF側の内容(ROSに必要な情報) <robot name=“hoge”> <link
name=“fuga”> ~~~ </link> <joint name=“fuga_joint”> ~~~ </joint> <transmission name=“foo”> <type>~~~</type> <joint>~~~</joint> <actuator>~~~</ actuator > </transmission> </robot> Using gazebo_ros_control with SDF instead of URDF: https://answers.ros.org/question/223196/using-gazebo_ros_control-with-sdf-instead-of-urdf/ ~Tips~ リンク機構のコントローラに “position_controllers::JointPositionController”が 使えなかった ➢ “effort_controllers::JointPositionController”は 使えた Position_controllersの場合, jointの応答が速すぎて,リンク機構が動けないのでは? ➢ 明確な理由はよくわかってない ・・・ 補足①
16.
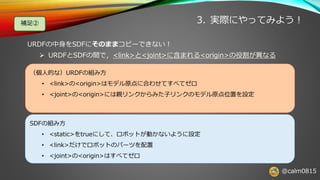
@calm0815 3. 実際にやってみよう!補足② URDFの中身をSDFにそのままコピーできない! ➢ URDFとSDFの間で,<link>と<joint>に含まれる<origin>の役割が異なる (個人的な)URDFの組み方 •
<link>の<origin>はモデル原点に合わせてすべてゼロ • <joint>の<origin>には親リンクからみた子リンクのモデル原点位置を設定 SDFの組み方 • <static>をtrueにして、ロボットが動かないように設定 • <link>だけでロボットのパーツを配置 • <joint>の<origin>はすべてゼロ
17.
@calm0815 3. 実際にやってみよう! 本日紹介させていただいたロボットは,以下のGitリポジトリで管理しています • echo_bot_ros_pkg ➢
https://github.com/calm0815/echo_bot_ros_pkgs ✓ 定義したURDF ➢ https://github.com/calm0815/echo_bot_ros_pkgs/blob/master/echo_ bot_common/echo_bot_description/robots/echo_bot.urdf ✓ 定義したSDF ➢ https://github.com/calm0815/echo_bot_ros_pkgs/blob/master/echo_ bot_simulator/echo_bot_gazebo/models/echo_bot/model.sdf 今回の実装に関するご意見やPRなど 色々とご協力くださった方々ありがとうございました!!! 今後ともよろしくです!!
18.
@calm0815 ご清聴ありがとうございました 質問等ありましたらよろしくお願いします
Download
![@calm0815
.urdf
ロボットの情報
• URDF[1]で記述
• 場合によっては
XacroからURDFに変換
• URDFをrosparamに登録
1. ROSからGazeboを起動するときの処理
[1] URDF XML Specifications:http://wiki.ros.org/urdf/XML
.urdf
形式[spawn_urdf]
.sdf
形式
Gazebo’s API : urdf2sdf
Gazebo’s world
convert
指令値など
Joint角など
Plugin:
gazebo_ros_control](https://image.slidesharecdn.com/test-200501132357/85/Gazebo-4-320.jpg)
![@calm0815
1. ROSからGazeboを起動するときの処理
.urdf
形式[spawn_urdf]
.sdf
形式
Gazebo’s API : urdf2sdf
Gazebo’s world
convert
指令値など
Joint角など
Plugin:
gazebo_ros_control
URDFで表現できないロボットは
Gazeboにスポーンさせることはできない
(と,思われている)
.urdf
ロボットの情報
• URDF[1]で記述
• 場合によっては
XacroからURDFに変換
• URDFをrosparamに登録
[1] URDF XML Specifications:http://wiki.ros.org/urdf/XML](https://image.slidesharecdn.com/test-200501132357/85/Gazebo-5-320.jpg)
![@calm0815
2. URDFの欠点と、SDFを用いた対応策
URDFで表現できないロボットって?
➢ よく指摘されるのが「リンク機構」を有するロボット
例)ETH Zurich が開発した「Ascento」[2]
[2] ASCENTO | Indoor Mobility Robot ETHZ, https://www.ascento.ethz.ch/
• 脚部にリンク機構を有している
• “Hip Motor”が回転することで,ロボットは
屈伸動作を行う](https://image.slidesharecdn.com/test-200501132357/85/Gazebo-6-320.jpg)
![@calm0815
.urdf
ロボットの情報
• URDF[1]で記述
• 場合によっては
XacroからURDFに変換
• URDFをrosparamに登録
.urdf
形式[spawn_urdf]
.sdf
形式
Gazebo’s API : urdf2sdf
Gazebo’s world
convert
指令値など
Joint角など
Plugin:
gazebo_ros_control
×
“URDFのみ”の起動方法 3. 実際にやってみよう!
使わない
[1] URDF XML Specifications:http://wiki.ros.org/urdf/XML](https://image.slidesharecdn.com/test-200501132357/85/Gazebo-11-320.jpg)
![@calm0815[2]SDFormat Specifications:http://sdformat.org/spec?ver=1.7&elem=sdf
3. 実際にやってみよう!
ロボットの情報
• URDFとSDF[2]の両方を用意
➢ URDFはROSが持つ情報
➢ SDFはGazeboが持つ情報
• URDFをrosparamに登録 Gazebo’s world
指令値など
Joint角など
.sdf
[spawn_model]
“URDFとSDFを併用する”起動方法
How to spawn an SDF:
https://www.theconstructsim.com/
gazebo-qa-003-spawn-sdf-custom-
model-gazebo-ros/
Plugin:
gazebo_ros_control](https://image.slidesharecdn.com/test-200501132357/85/Gazebo-12-320.jpg)




![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)























