Downloaded 11 times
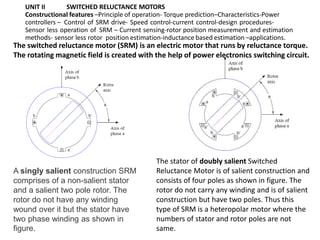


The document discusses switched reluctance motors (SRM). It describes the construction of singly and doubly salient SRMs, with the rotor having no windings. The principle of operation is described as reluctance torque, where the rotating magnetic field is created through power electronics switching. Torque is produced as the rotor aligns itself to the minimum reluctance path as different stator phase windings are energized in sequence. The document discusses torque prediction, motor characteristics, power controllers, speed and current control, sensorless operation methods like inductance-based estimation, and applications of SRM.