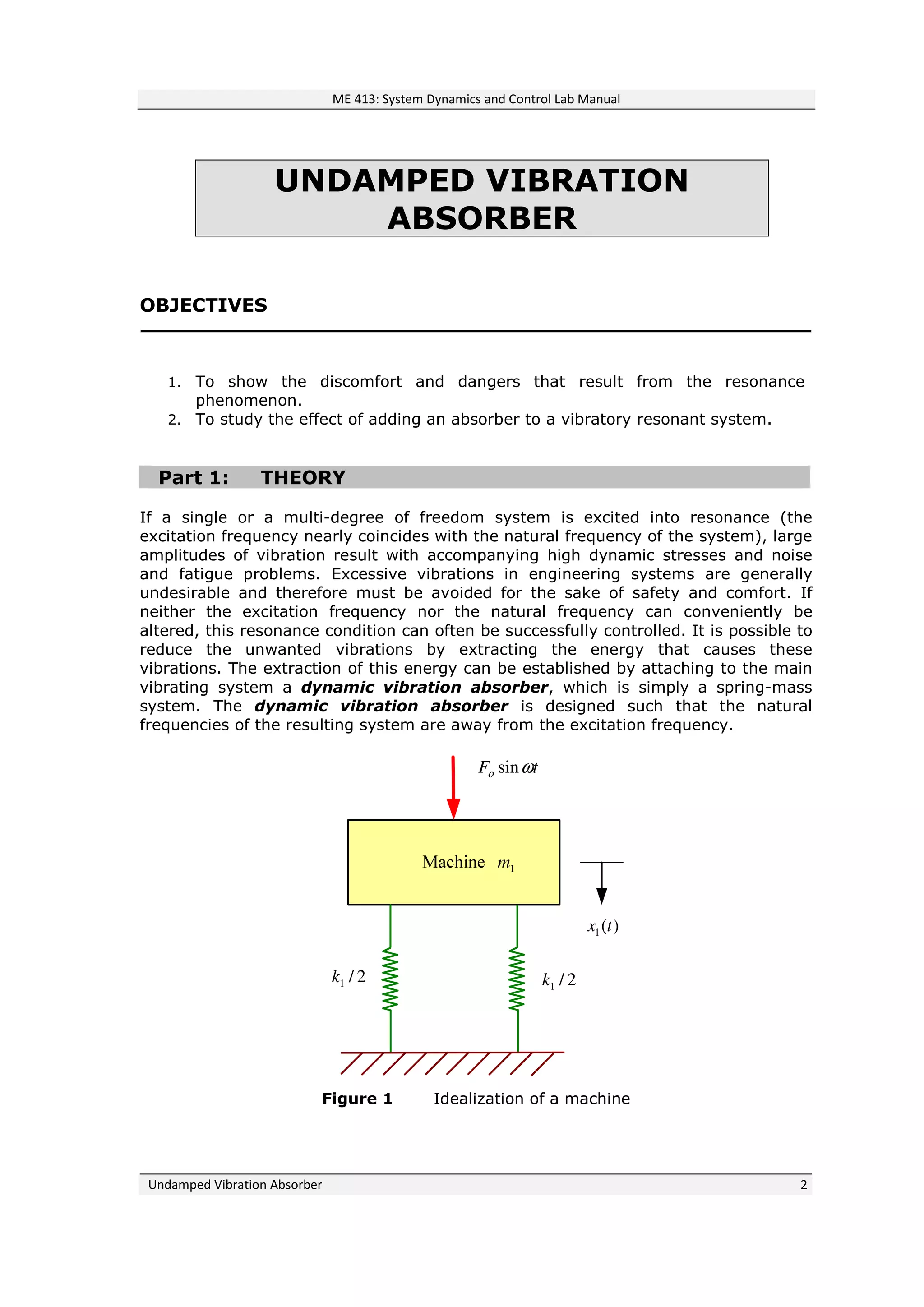
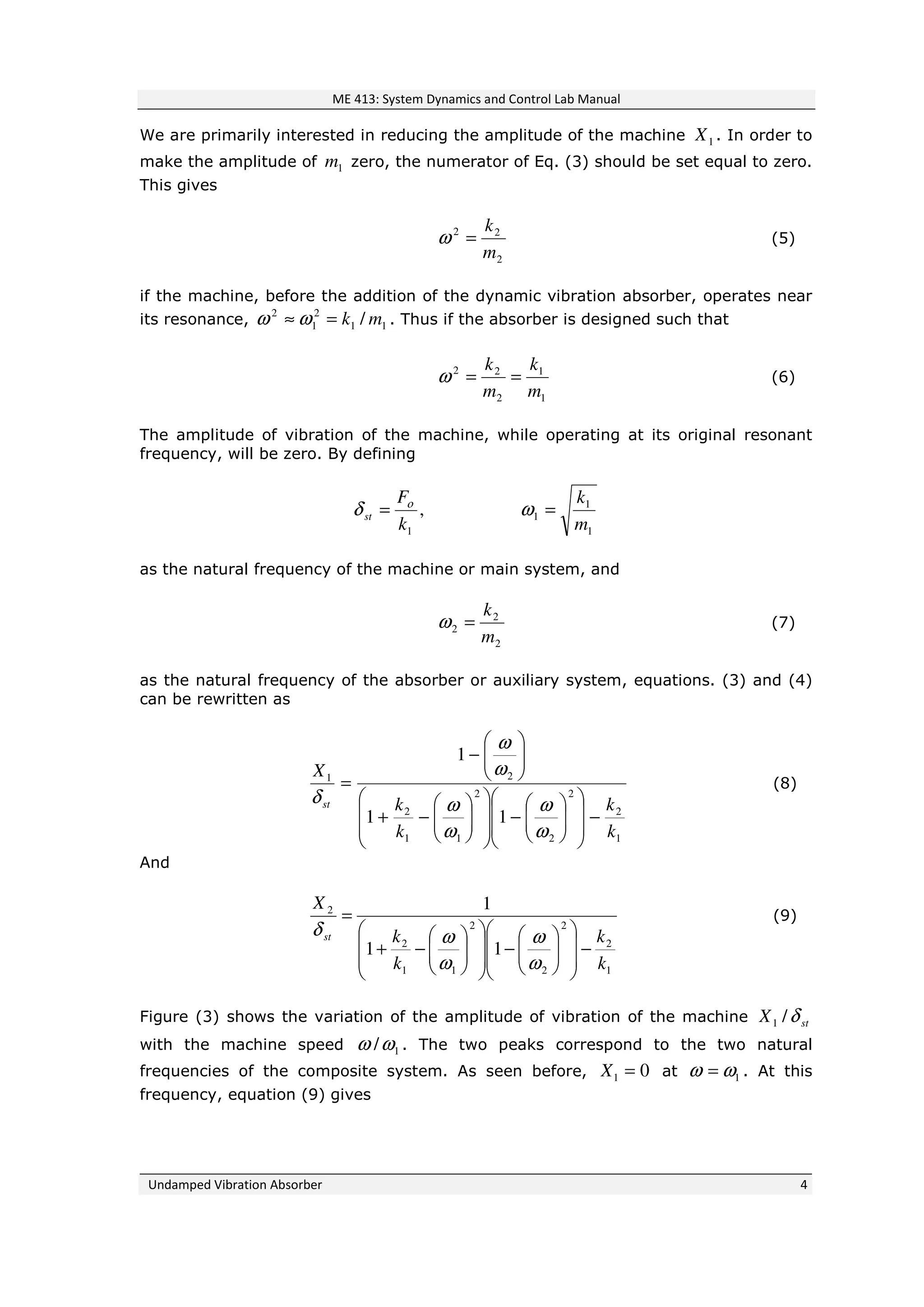
This document provides a theory and experimental procedure for demonstrating an undamped vibration absorber. The theory section explains how attaching an auxiliary mass-spring system to a vibrating object can reduce vibrations by extracting the energy that causes them. If the absorber's natural frequency matches the object's frequency, the object's amplitude can be reduced to zero. The experiment uses a beam with a motor to induce vibrations, and an absorber attached below to reduce the beam's amplitude at different motor speeds by adjusting the absorber's mass positions. The goal is to determine the absorber configuration that minimizes the beam's vibrations.






![ME 413: System Dynamics and Control Lab Manual
Undamped Vibration Absorber 14
References
[1] Experiments in Vibration Using The TM 16 Universal Vibration, TQ Ltd
[2] K. Ogata, System Dynamics, Fourth Edition, Pearson Prentice Hall, 2004.
[3] S. S. Rao, Mechanical vibrations, SI Edition, Pearson Prentice Hall, 2005.
[4] http://ta.twi.tudelft.nl/nw/users/vuik/information/tacoma_eng.html
[5] http://abel.math.harvard.edu/archive/21b_fall_03/tacoma/
[6] http://perso.wanadoo.fr/olivier.granier/meca/accueil.htm
[7] http://www.kettering.edu/~drussell/Demos/absorber/DynamicAbsorber.html
[8] http://www.mfg.mtu.edu/cyberman/machtool/machtool/vibration/absorb.html
[9] http://www.kettering.edu/~drussell/Demos/absorber/DynamicAbsorber.html
View publication statsView publication stats](https://image.slidesharecdn.com/undampedvibrationabsorber-180214133610/75/Undamped-vibration-absorber-15-2048.jpg)



































































