Downloaded 28 times


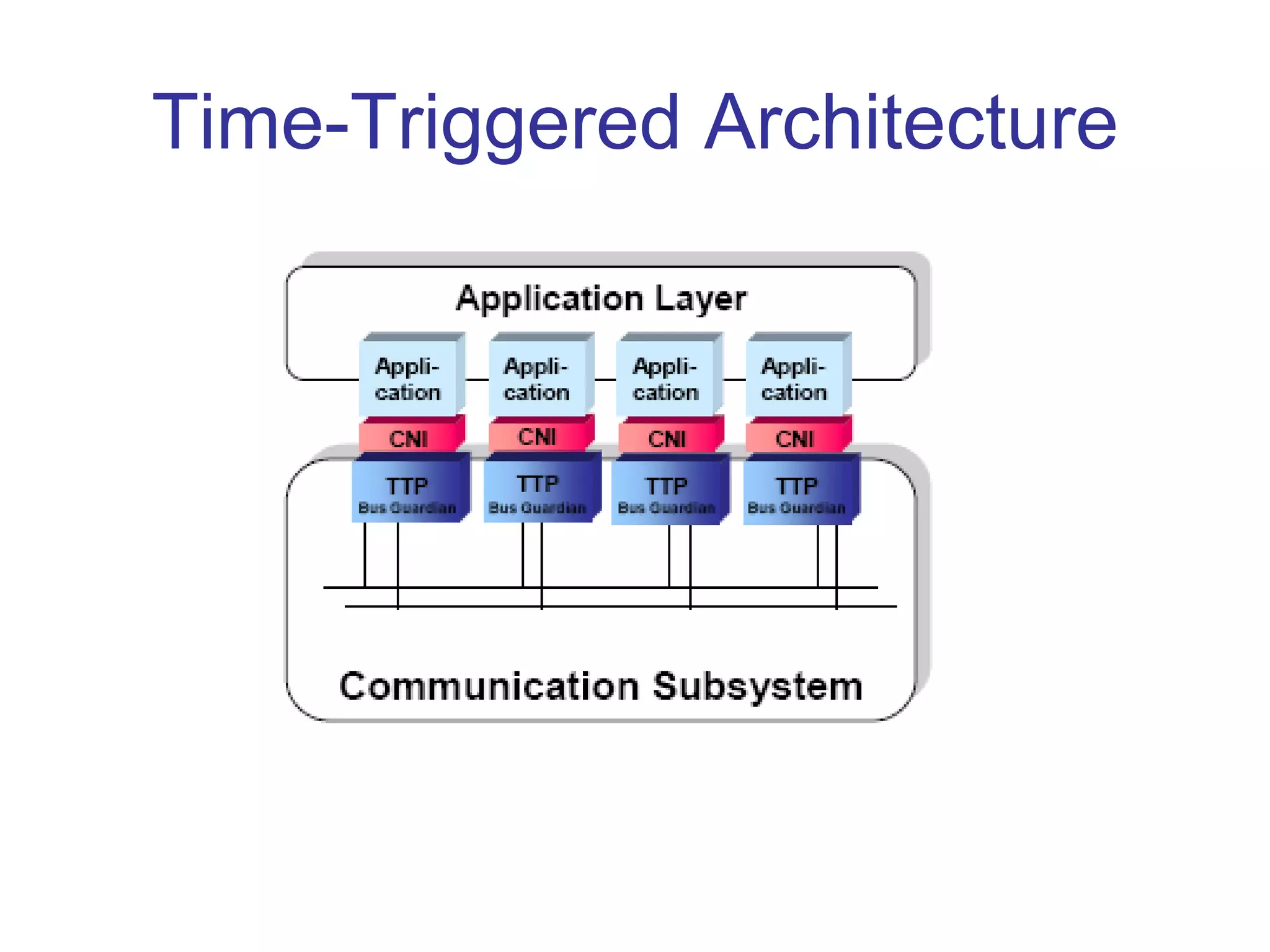
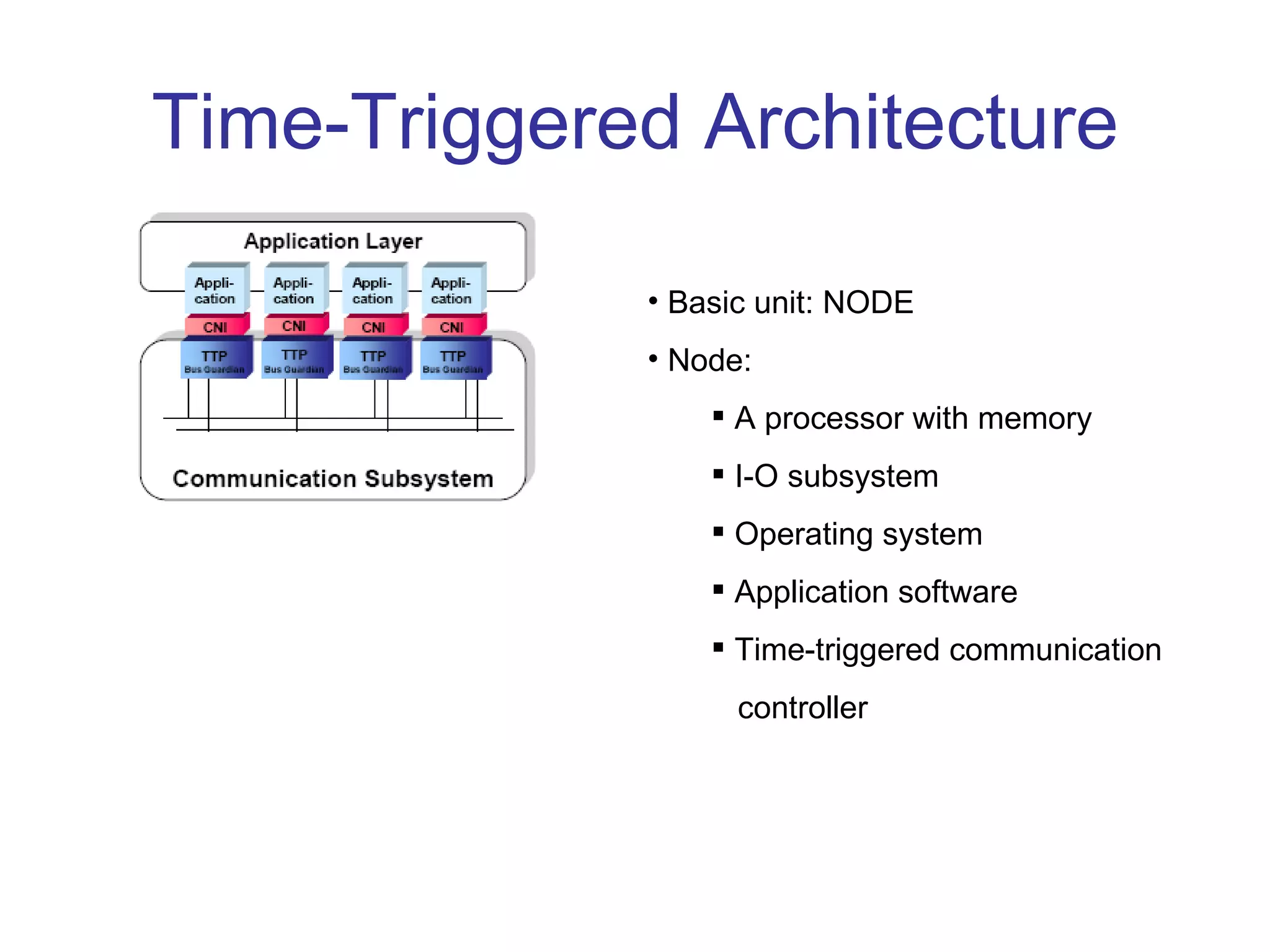
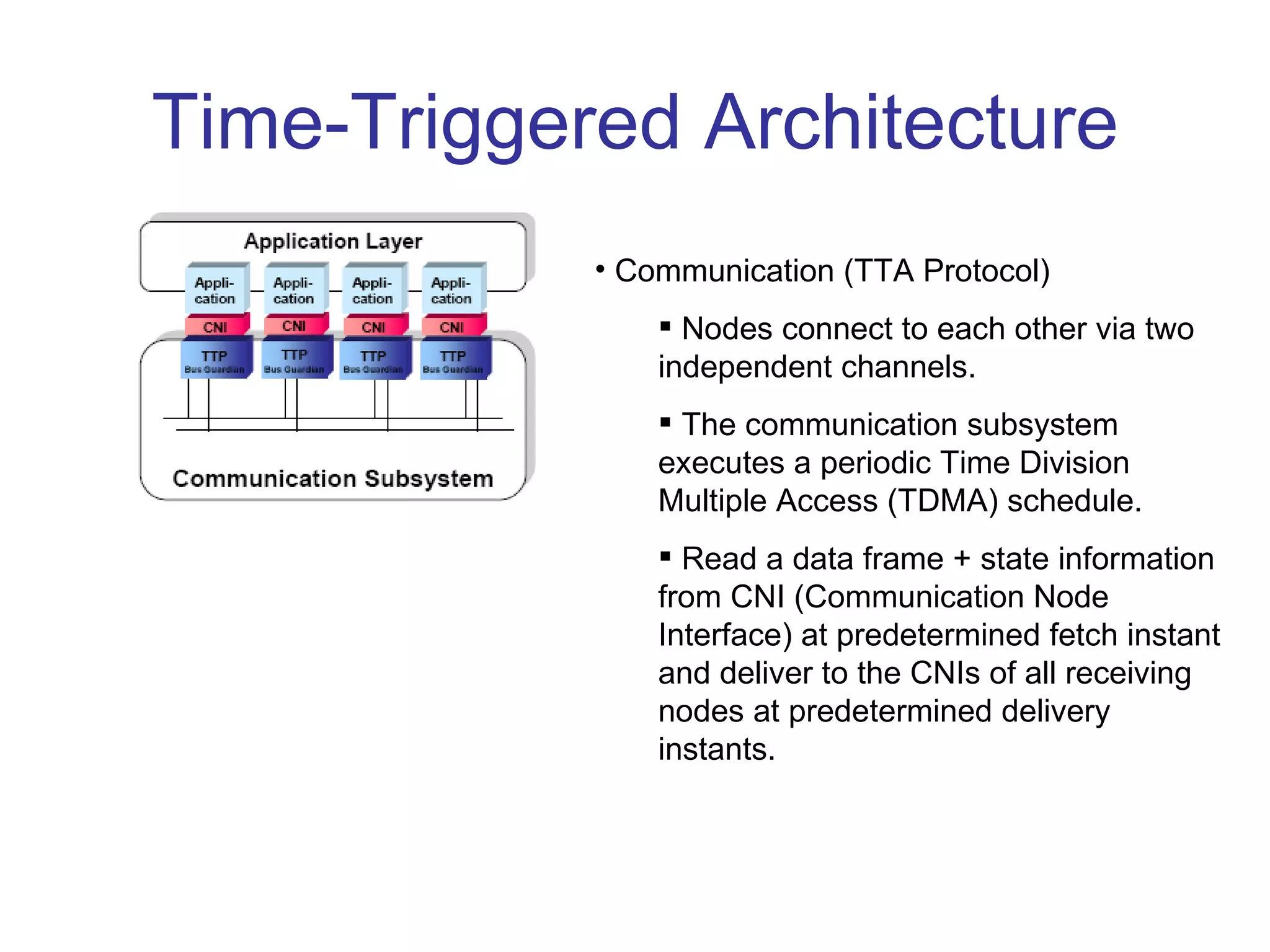
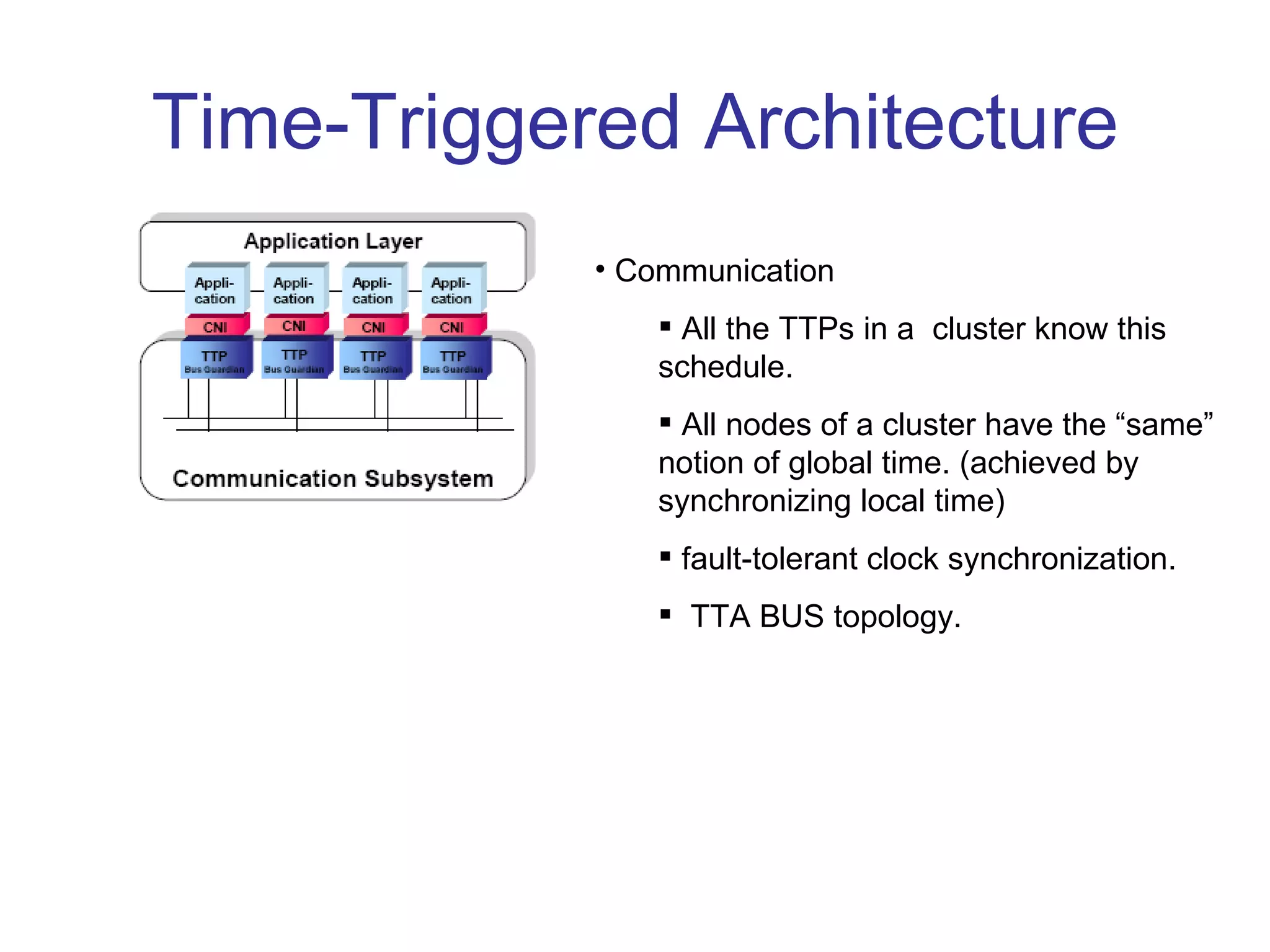
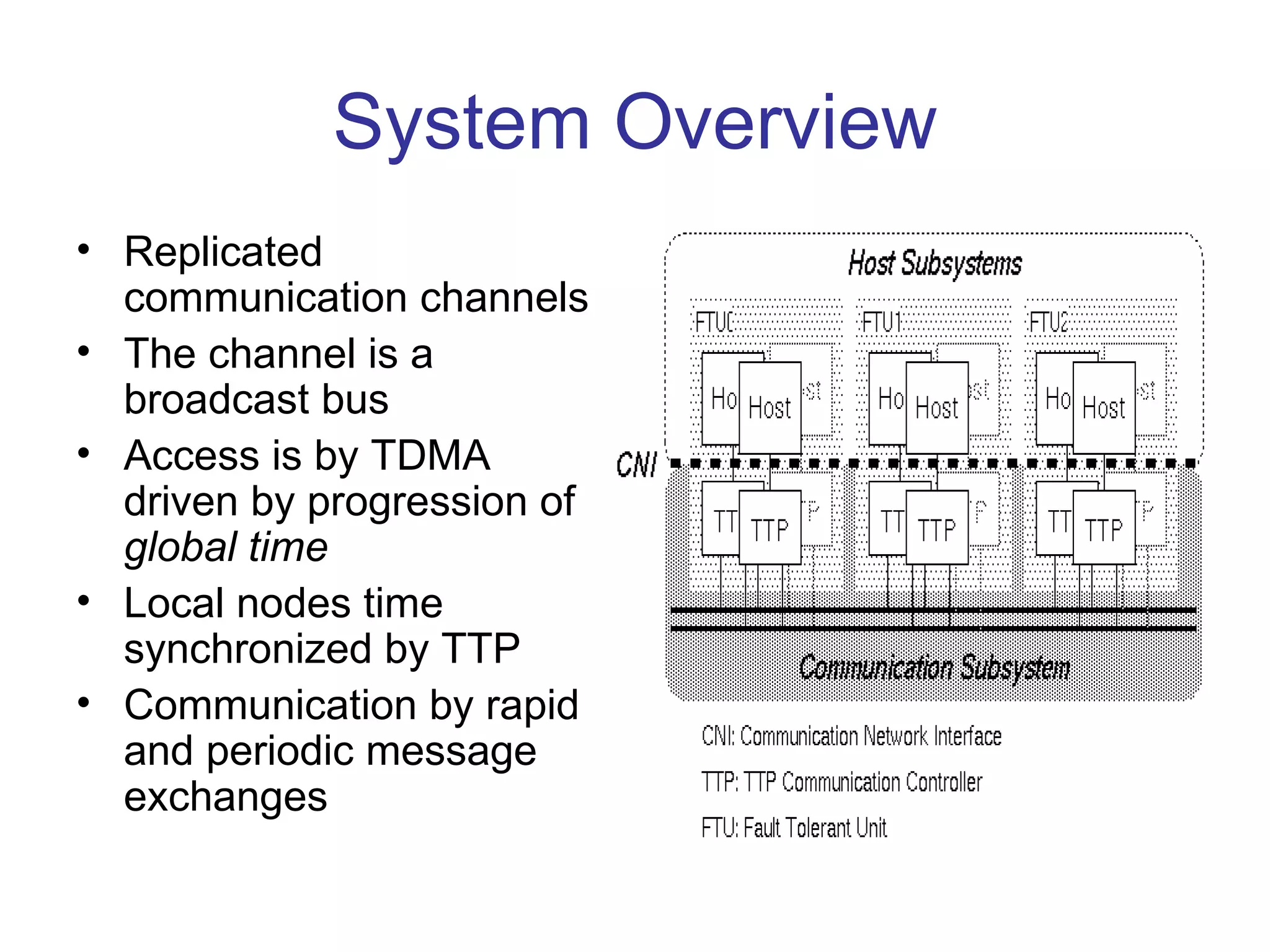

The Time-Triggered Architecture (TTA) is a platform for safety-critical embedded systems like aircraft flight control that uses a time-triggered protocol over redundant communication channels. Nodes are precisely scheduled to transmit and receive messages to ensure deterministic and fault-tolerant execution. While providing real-time performance guarantees, the rigid schedule allows easy testing but limits flexibility for spontaneous messages.
![[PPT] _ Unit 2 _ Complete PPT.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptunit2completeppt-220516115836-332a1107-thumbnail.jpg?width=640&height=640&fit=bounds)