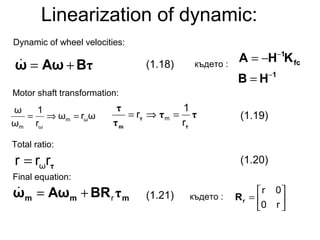
This thesis proposes a control system for generating control rules to dynamically manage a mobile robot. The objective is to model a control system that determines the robot's behavior based on its movement and environmental changes. Methods include using dynamical models, kinematic models, and hybrid systems to transform control methods into desired velocities. Experiments were conducted to test the system with obstacles. Results showed the selected synthetic approaches suitably achieved position control objectives. The thesis purpose of synthesizing a mobile robot control system was successfully achieved, validated by dynamic simulation of the management system.










![Experiment data :
xg,
[m]
yg,
[m]
Δ, [m] ε, [m] Tf, [s] ti kp xo,
[m]
yo,
[m]
5 5 0.3 0.05 80 0.001 1 1.4 1.5
Table 1
Test 1. Coordinate system motion with one obstacle in the
way of the robot.](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-18-320.jpg)
![0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x, [m]
y,[m]
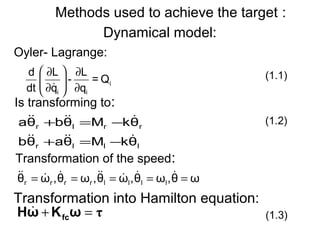
Fig.10
Trajectory in coordinate system](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-19-320.jpg)
![0 10 20 30 40 50 60 70 80
-5
0
5
10
15
20
25
t,[s]
wr
,wrd
[rad/s]
Желана ъглова скорост на дясното колело
Ъглова скорост на дясното колело
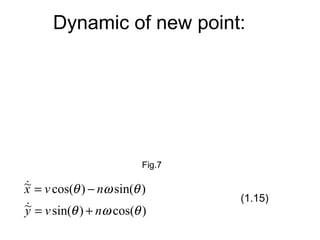
Fig.11
0 10 20 30 40 50 60 70 80
-5
0
5
10
15
20
25
t,[s]
wl
,wld
[rad/s]
Желана ъглова скорост на лявото колело
Ъглова скорост на лявото колело
Angular velocities of right and left
wheels:](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-20-320.jpg)
![0 10 20 30 40 50 60 70 80
-3
-2
-1
0
1
2
3
x 10
-3
t,[s]
Mr
,Mrd
,[Nm]
Желан момент на десния двигател
Момент на десния двигател
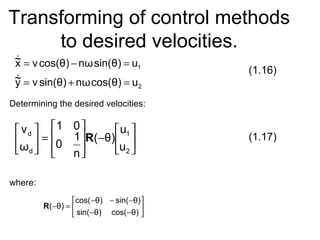
Fig.12
0 10 20 30 40 50 60 70 80
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
x 10
-3
t,[s]
Ml
,Mld
,[Nm]
Желан момент на левия двигател
Момент на левия двигател
Torques of right and left motors](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-21-320.jpg)
![0 10 20 30 40 50 60 70 80
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
t,[s]
iar
,iard
[A]
Желан ток на десния двигател
Ток на десния двигател
Fig.13
0 10 20 30 40 50 60 70 80
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
t,[s]
ial
,iald
[A]
Желан ток на левия двигател
Ток на левия двигател
Right and left motor currents:](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-22-320.jpg)
![xg,
[m]
yg,
[m]
Δ,
[m]
ε,
[m]
Tf,
[s]
ti kp xo,
[m]
yo,
[m]
xo2,
[m]
yo2,
[m]
5 5 0.3 0.05 100 0.001 0.5 1.4 1.5 3.2 2.9
Table 2
Test 2. Coordinate system motion
with two obstacles in the way of the
robot.](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-23-320.jpg)
![0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Траектория на мобилния робот в координатната система
x, [m]
y,[m]
Fig.14 Trajectory](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-24-320.jpg)
![0 10 20 30 40 50 60 70 80 90 100
-5
0
5
10
15
20
25
t,[s]
wr
,wrd
[rad/s]
Желана ъглова скорост на дясното колело
Ъглова скорост на дясното колело
Fig.15
0 10 20 30 40 50 60 70 80 90 100
-5
0
5
10
15
20
25
t,[s]
wl
,wld
[rad/s]
Желана ъглова скорост на лявото колело
Ъглова скорост на лявото колело
Angular velocities of right and left
wheels:](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-25-320.jpg)
![0 10 20 30 40 50 60 70 80 90 100
-6
-5
-4
-3
-2
-1
0
1
2
3
x 10
-3
t,[s]
Mr
,Mrd
,[Nm]
Желан момент на десния двигател
Момент на десния двигател
0 10 20 30 40 50 60 70 80 90 100
-3
-2
-1
0
1
2
3
4
5
6
x 10
-3
t,[s]
Ml
,Mld
,[Nm]
Желан момент на левия двигател
Момент на левия двигател
Fig.16
Torques of right and left motors](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-26-320.jpg)
![0 10 20 30 40 50 60 70 80 90 100
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
t,[s]
iar
,iard
[A]
Желан ток на десния двигател
Ток на десния двигател
Фиг.17
0 10 20 30 40 50 60 70 80 90 100
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t,[s]
ial
,iald
[A]
Желан ток на левия двигател
Ток на левия двигател
Right and left motor currents:](https://image.slidesharecdn.com/e5acf6f3-fe20-489a-b710-eac8621791ba-160615131106/85/Thesis_EN-27-320.jpg)

















![射頻電子實驗手冊 [實驗6] 阻抗匹配模擬](https://cdn.slidesharecdn.com/ss_thumbnails/simlab6-150613072411-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)











































