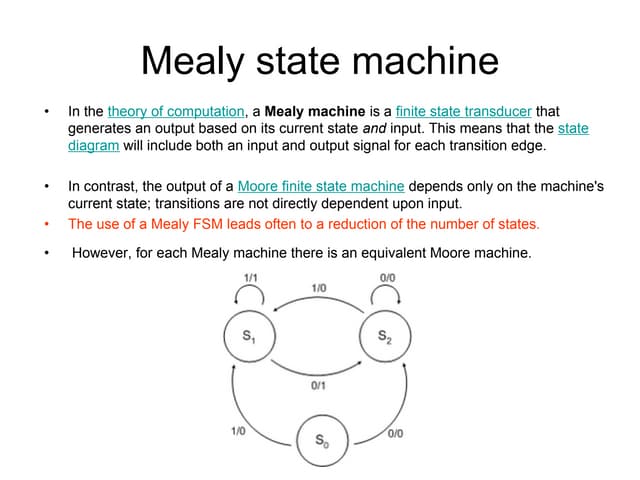
The document compares Mealy and Moore finite state machines. Mealy machines have outputs that are a function of both the present state and inputs, while Moore machines have outputs that are a function only of the present state. The document provides examples of Mealy and Moore machines that detect a "10" sequence and a "111" sequence. It discusses their state diagrams, circuit implementations, and timing diagrams. The timing diagram shows that Mealy machines can have invalid or "glitchy" outputs when the inputs change asynchronously, while Moore machines always have valid outputs.