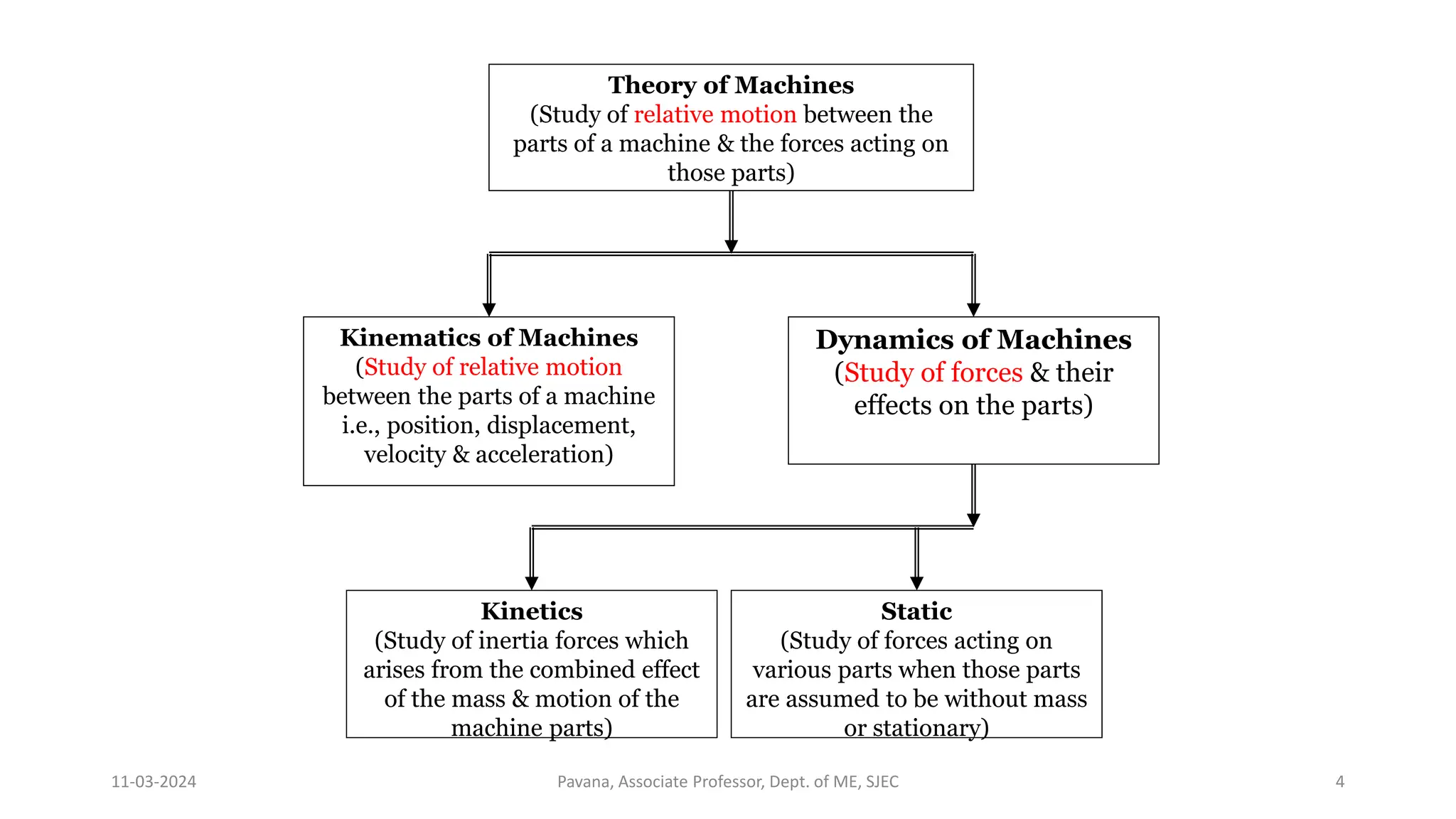
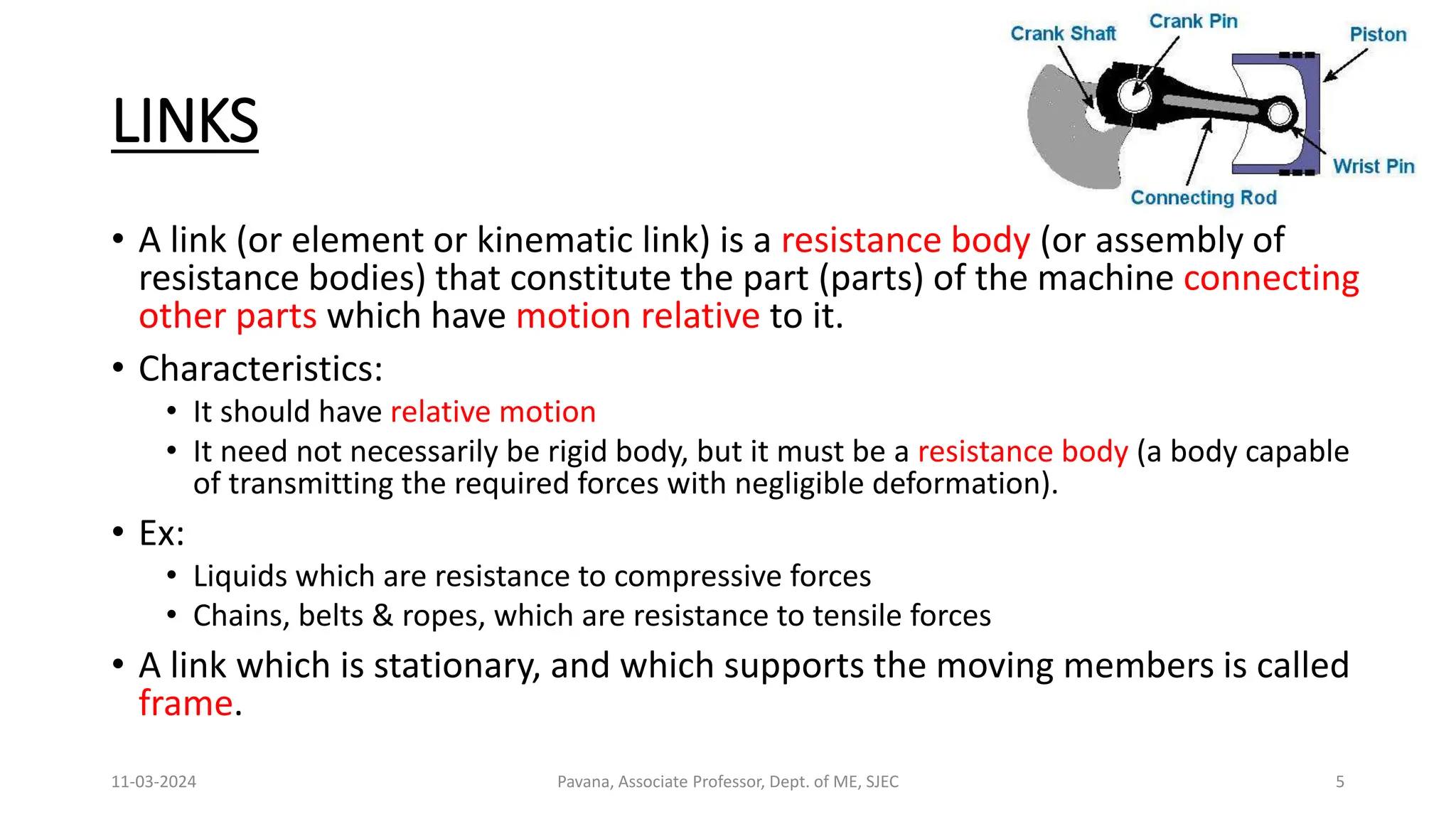
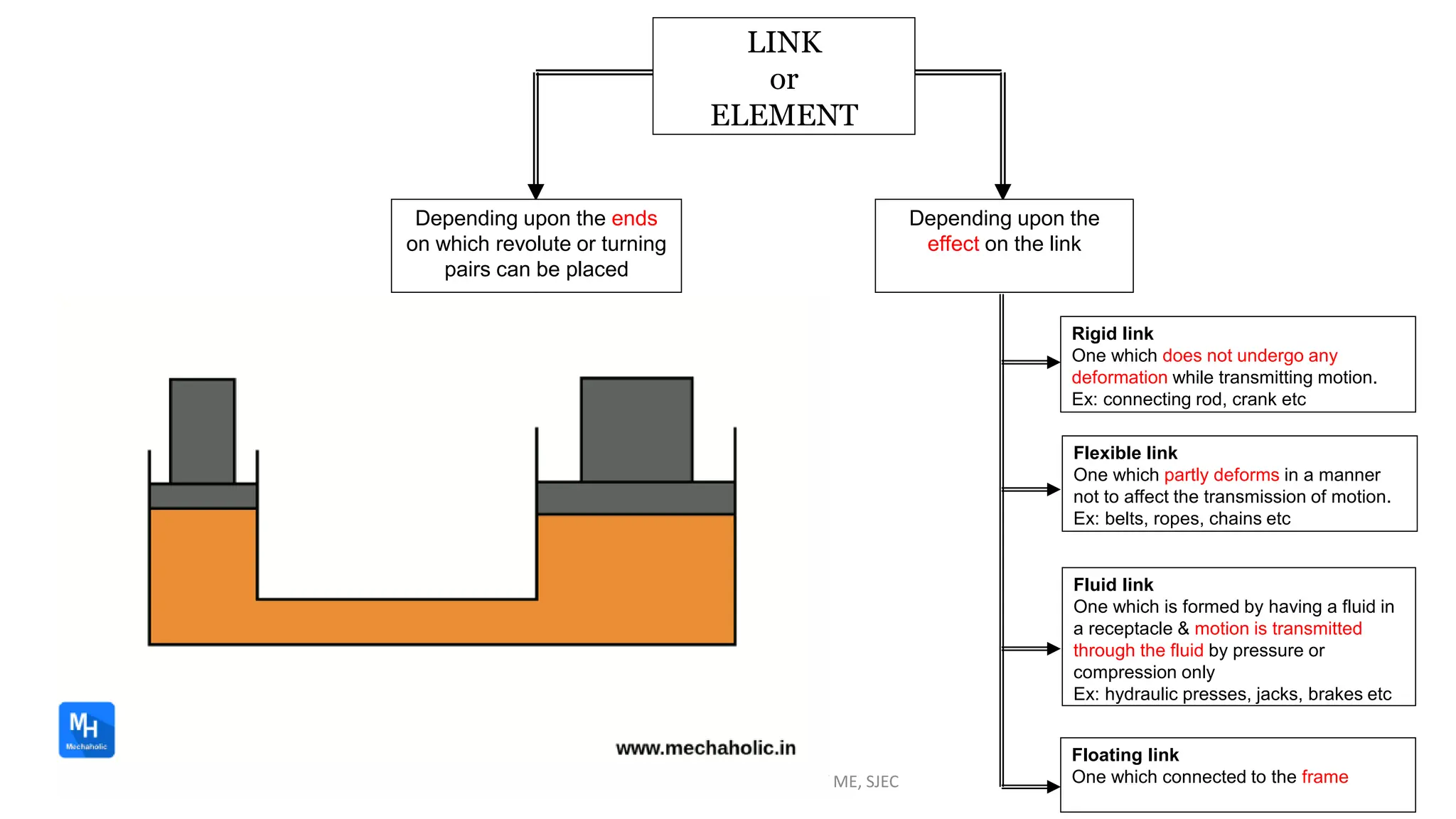
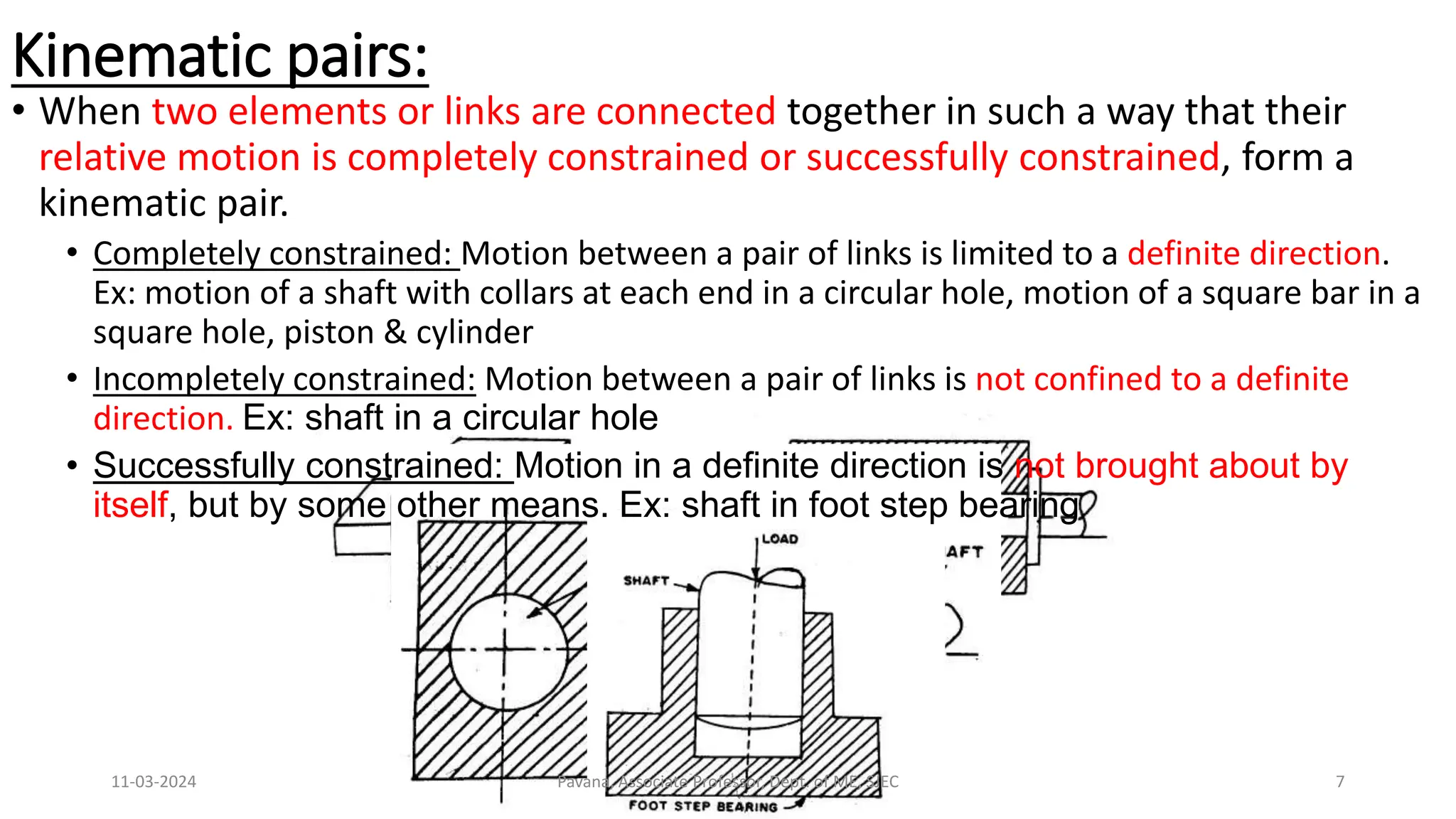
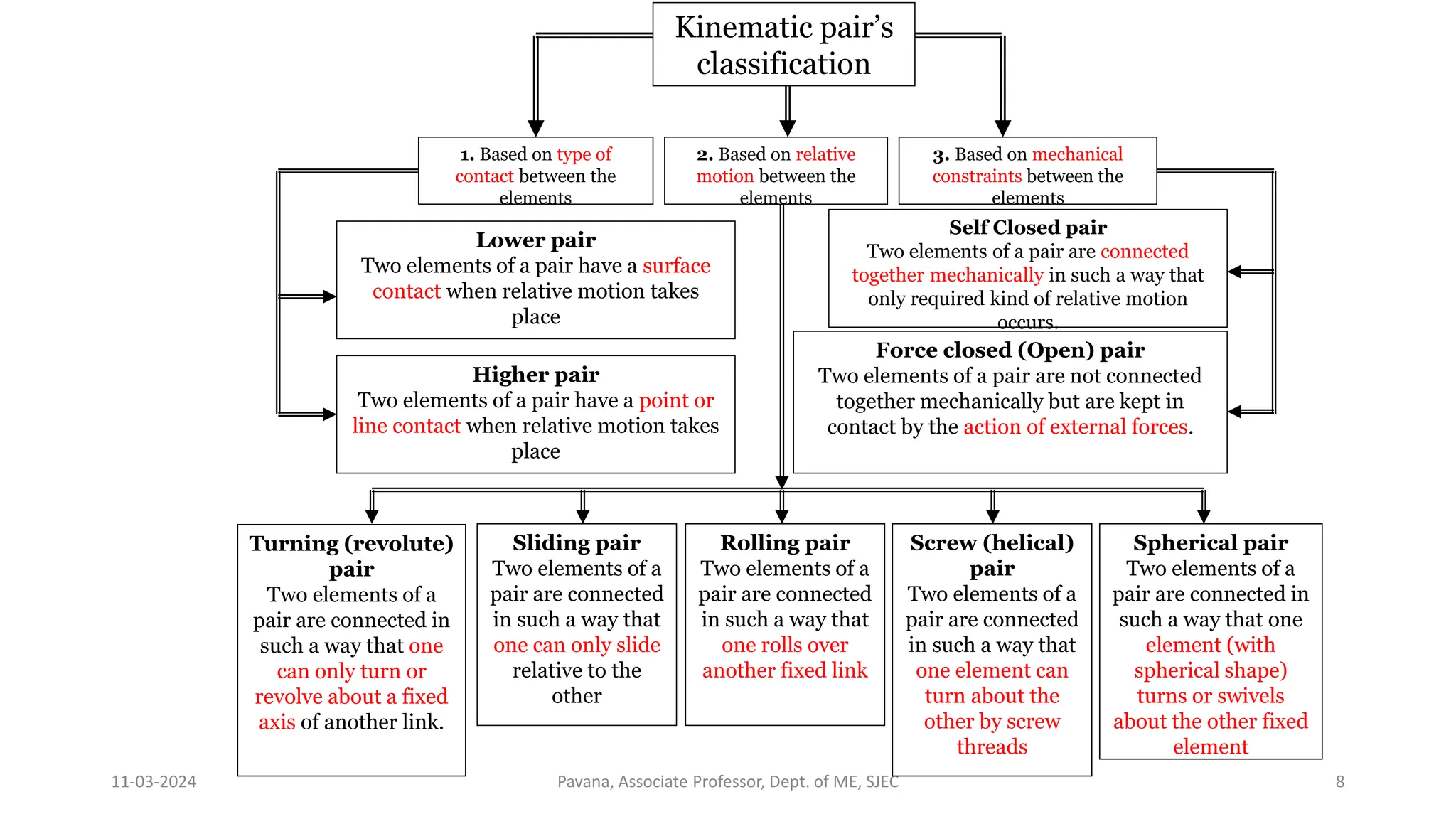
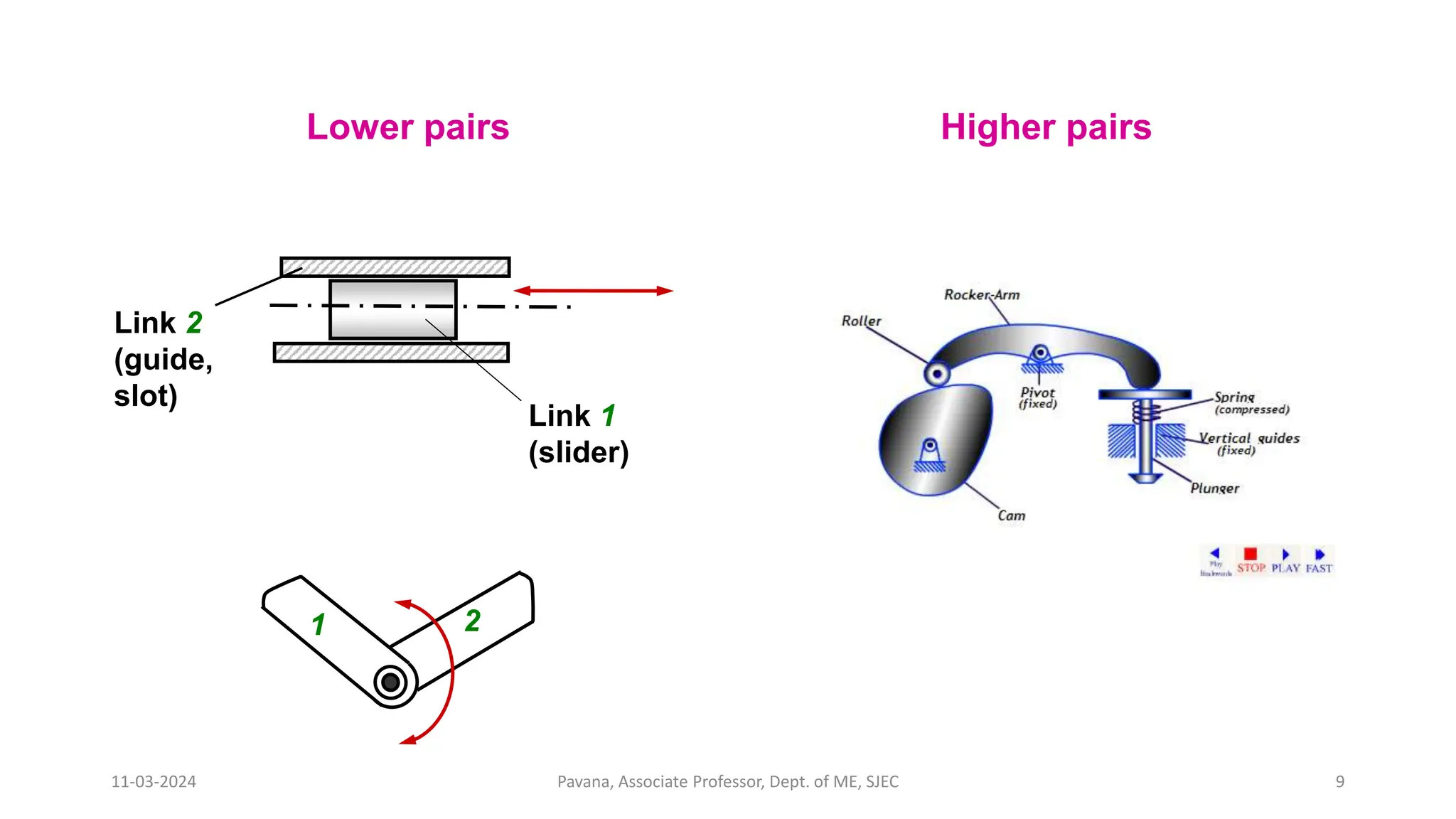
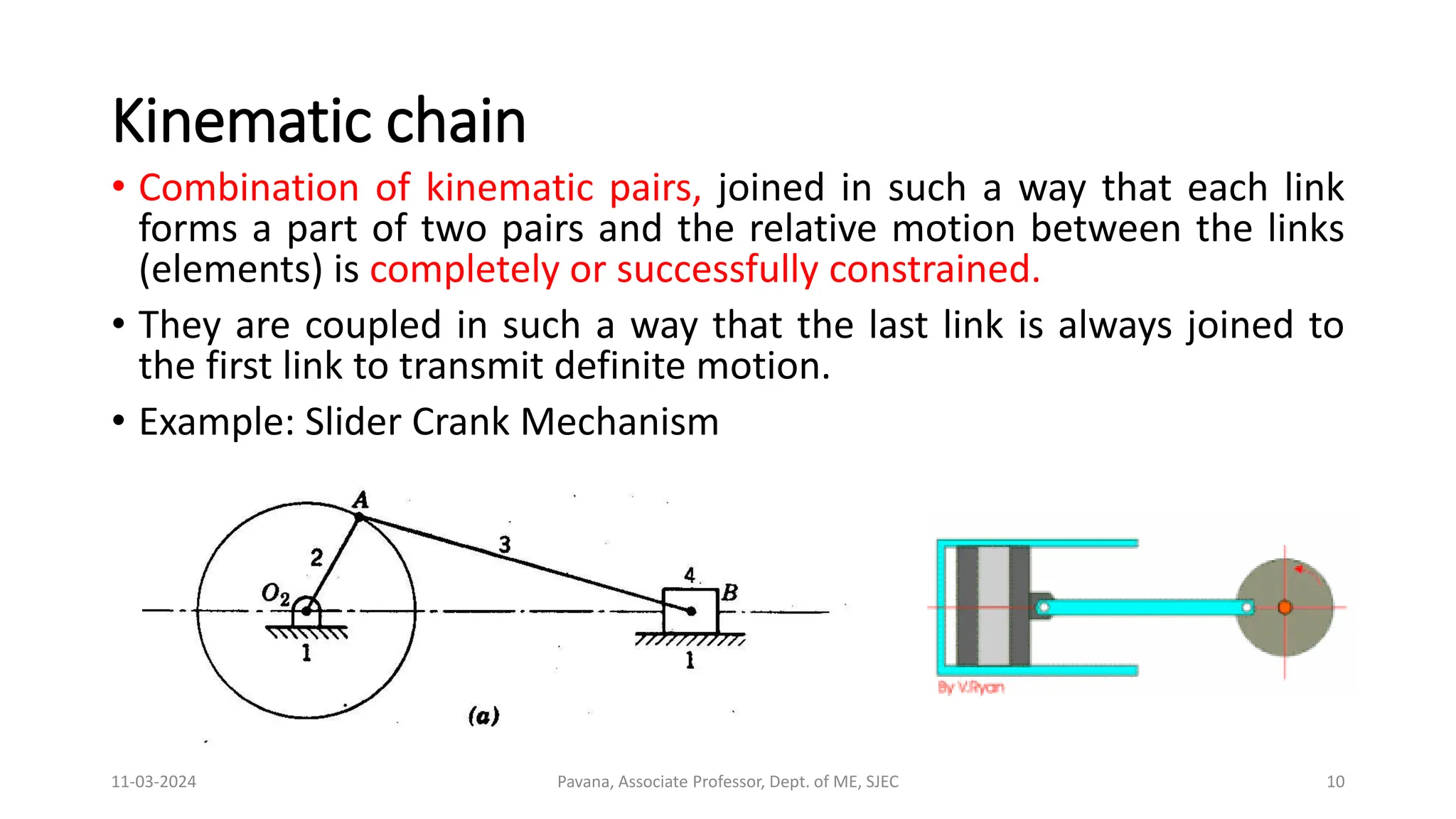
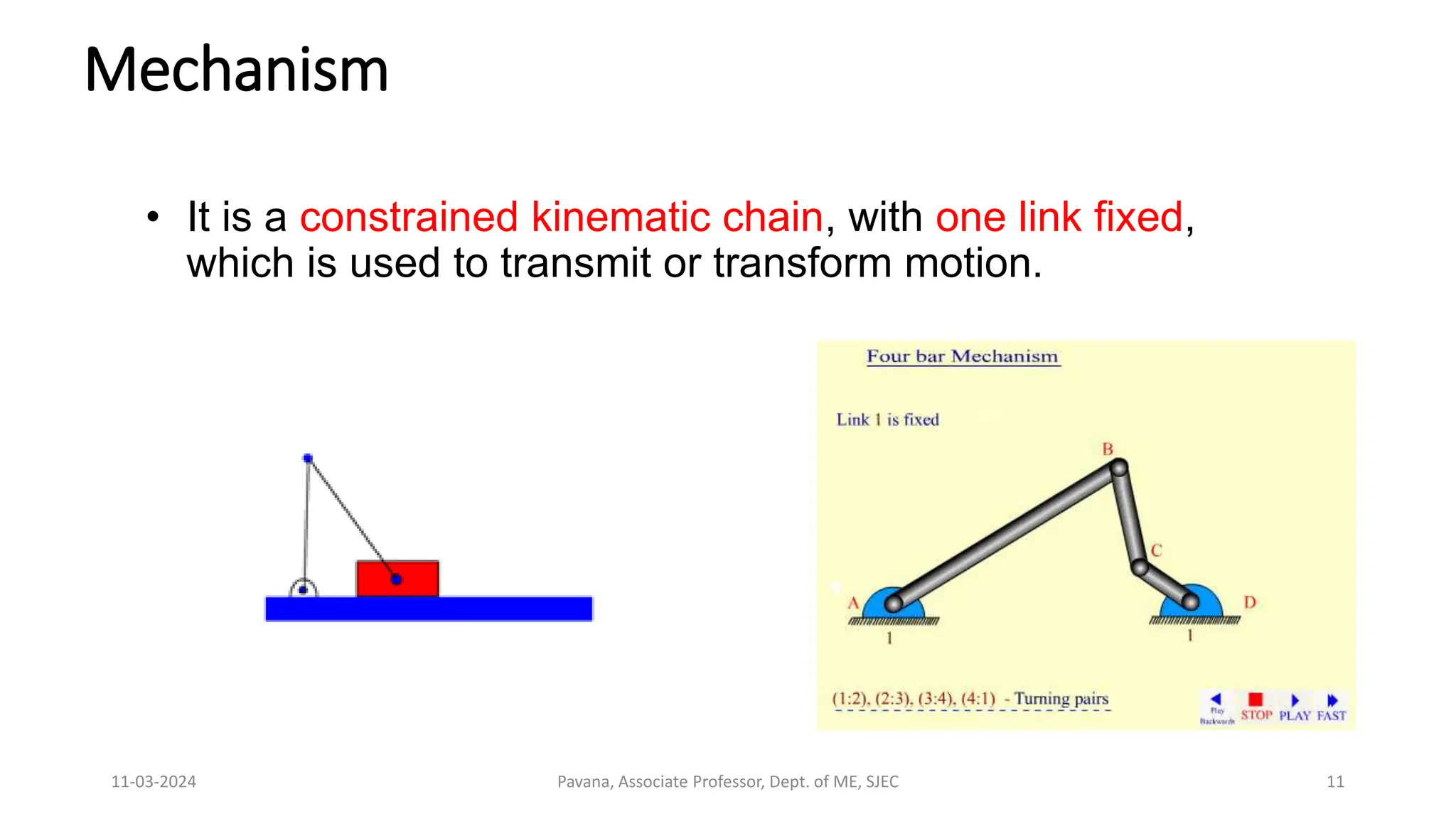
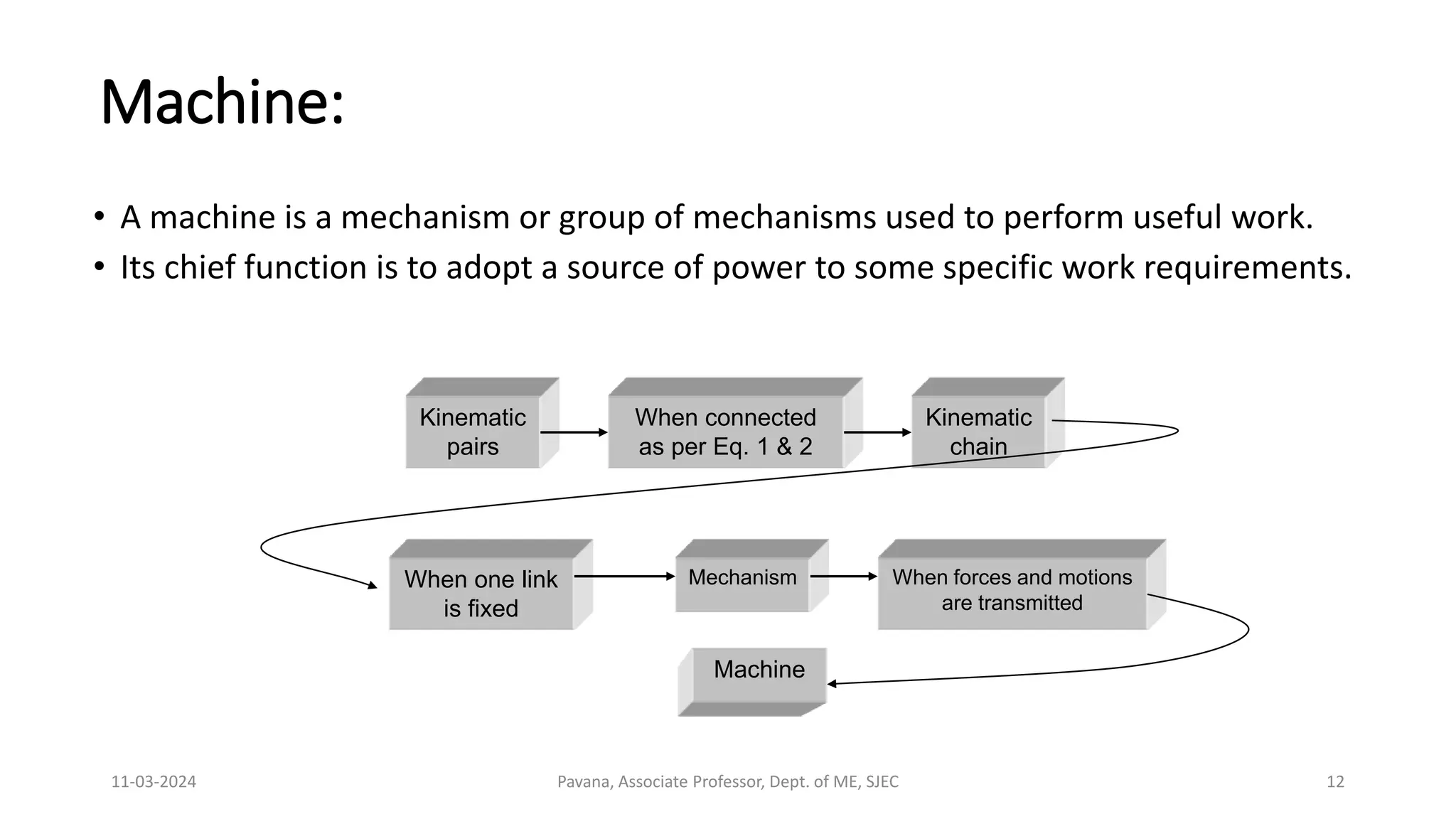
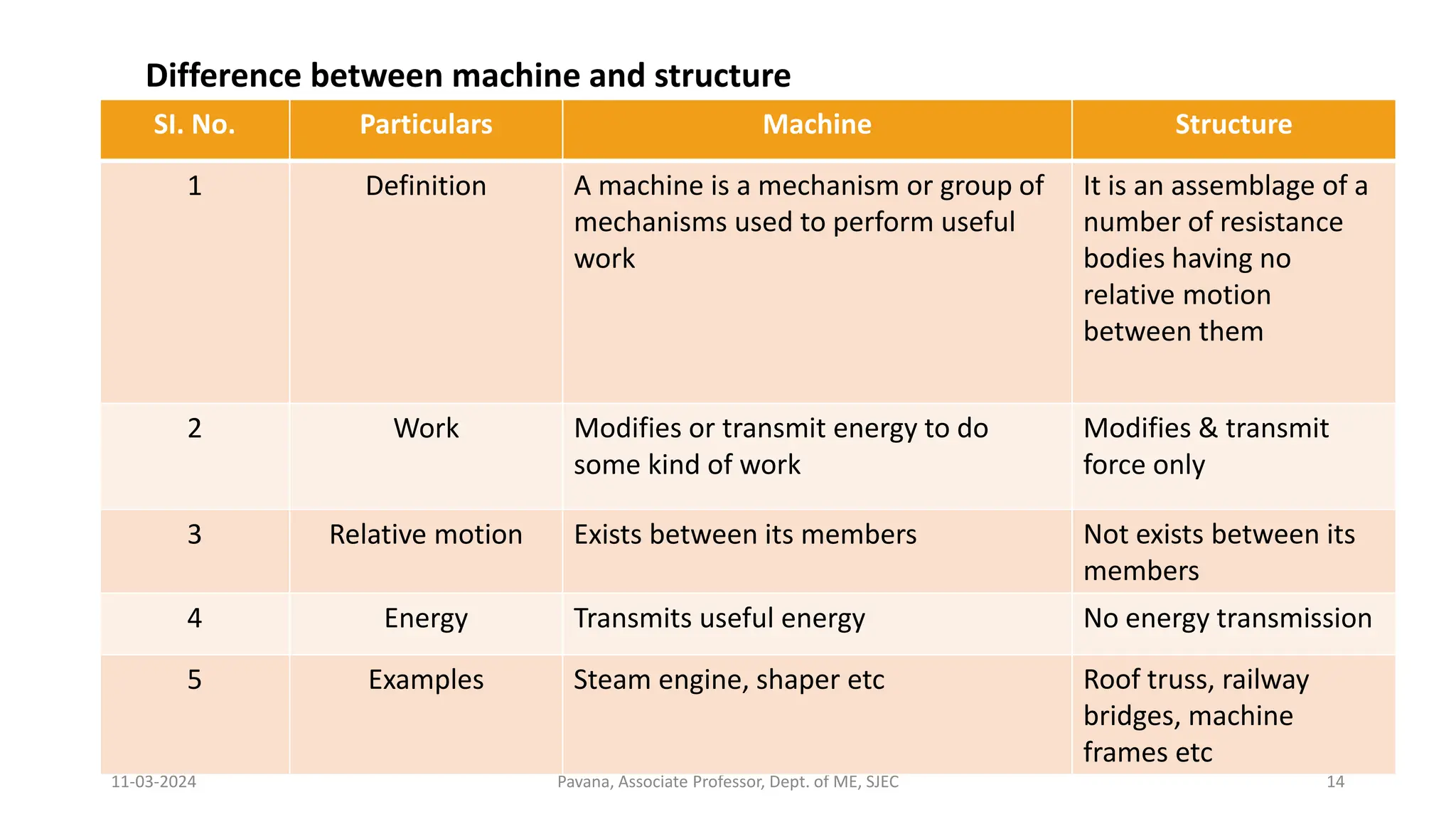
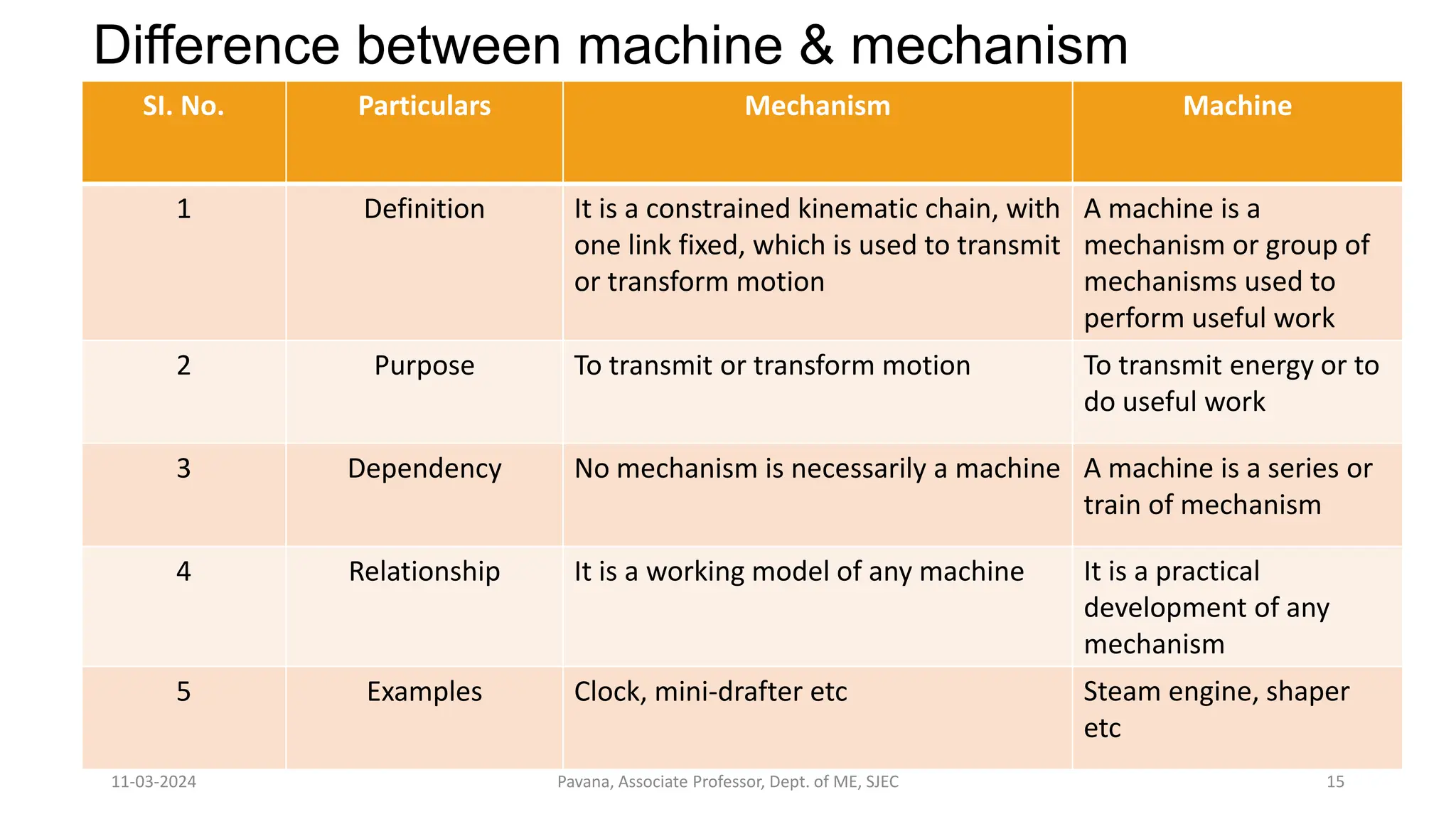
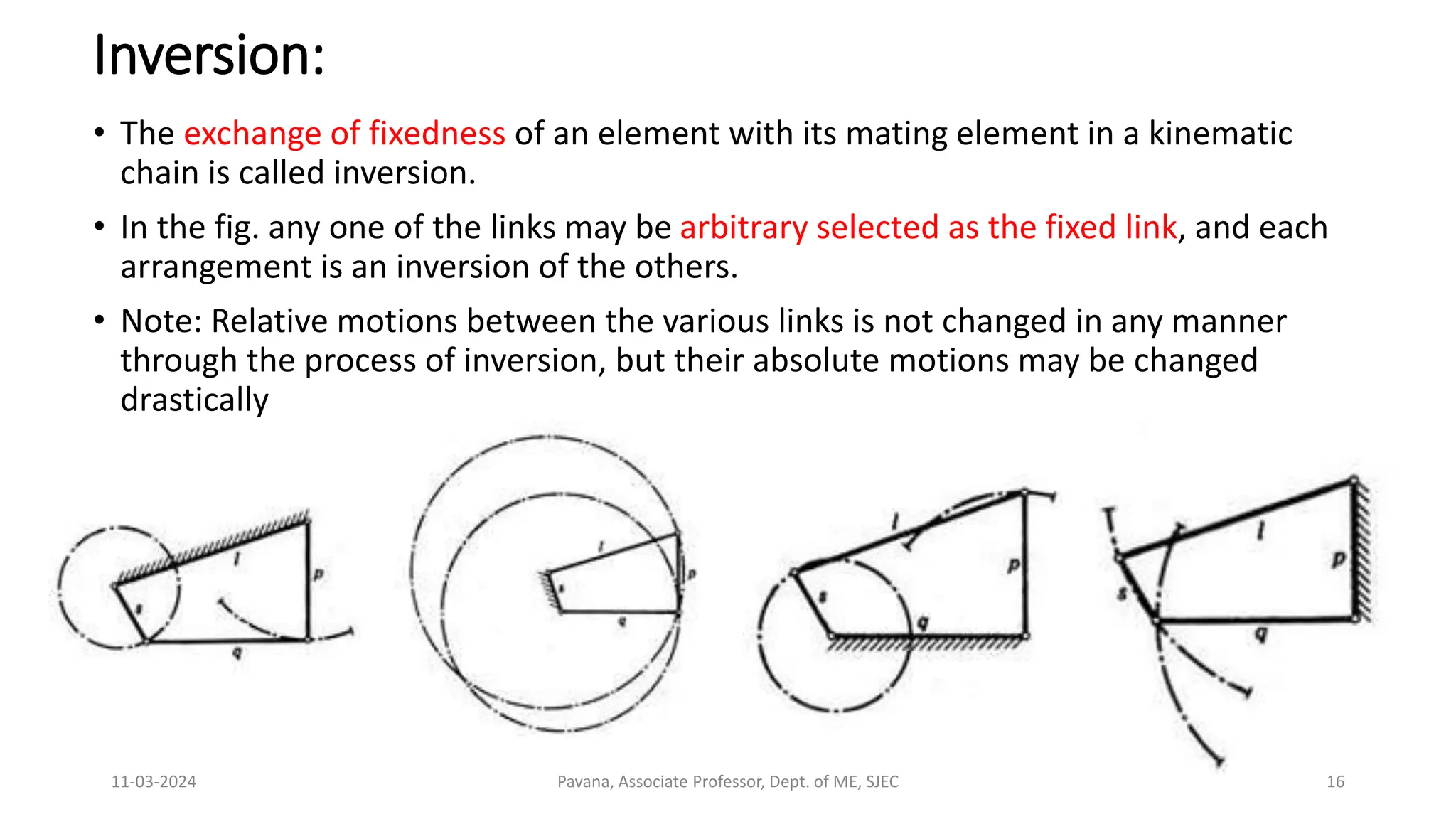
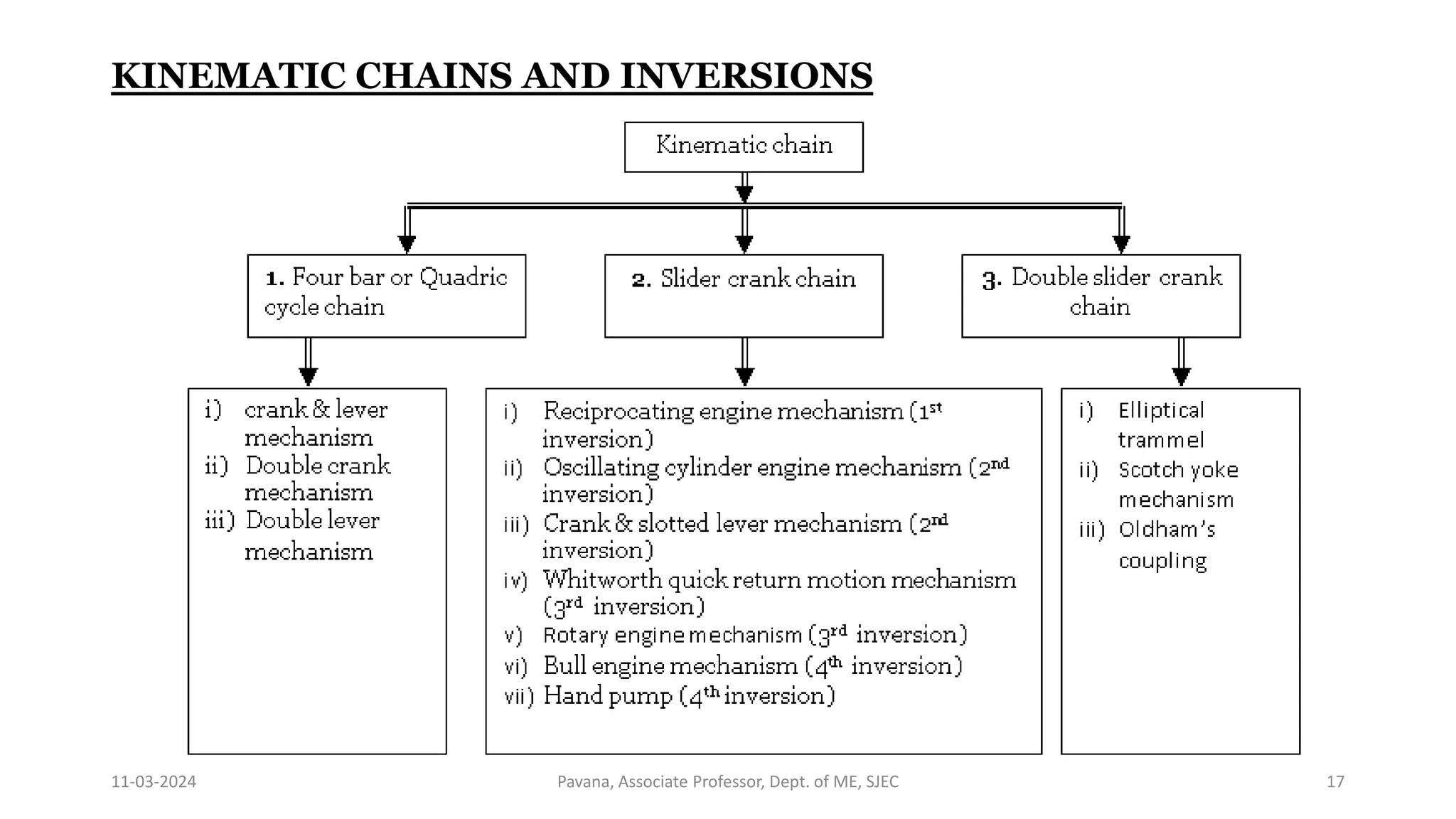
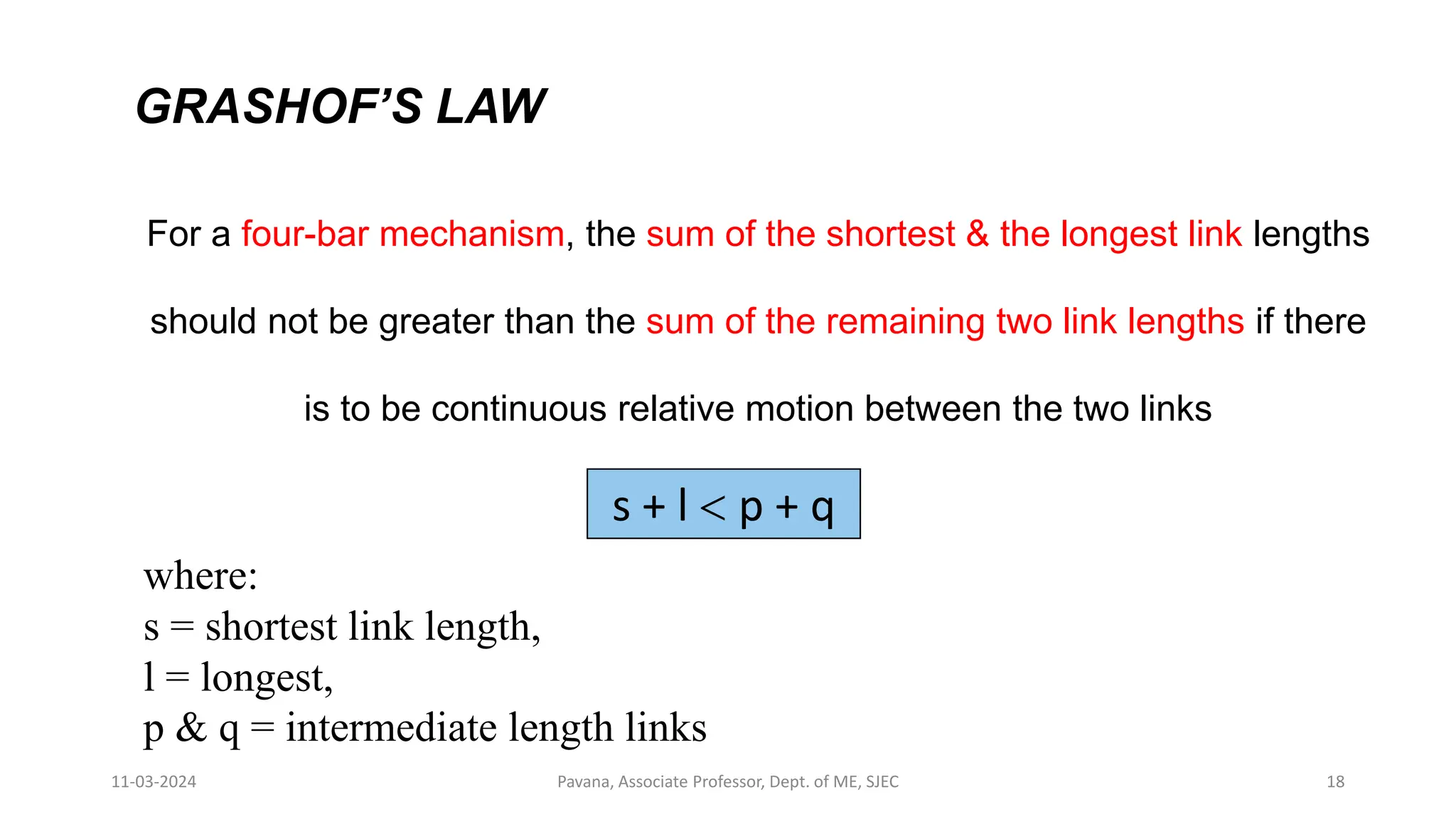
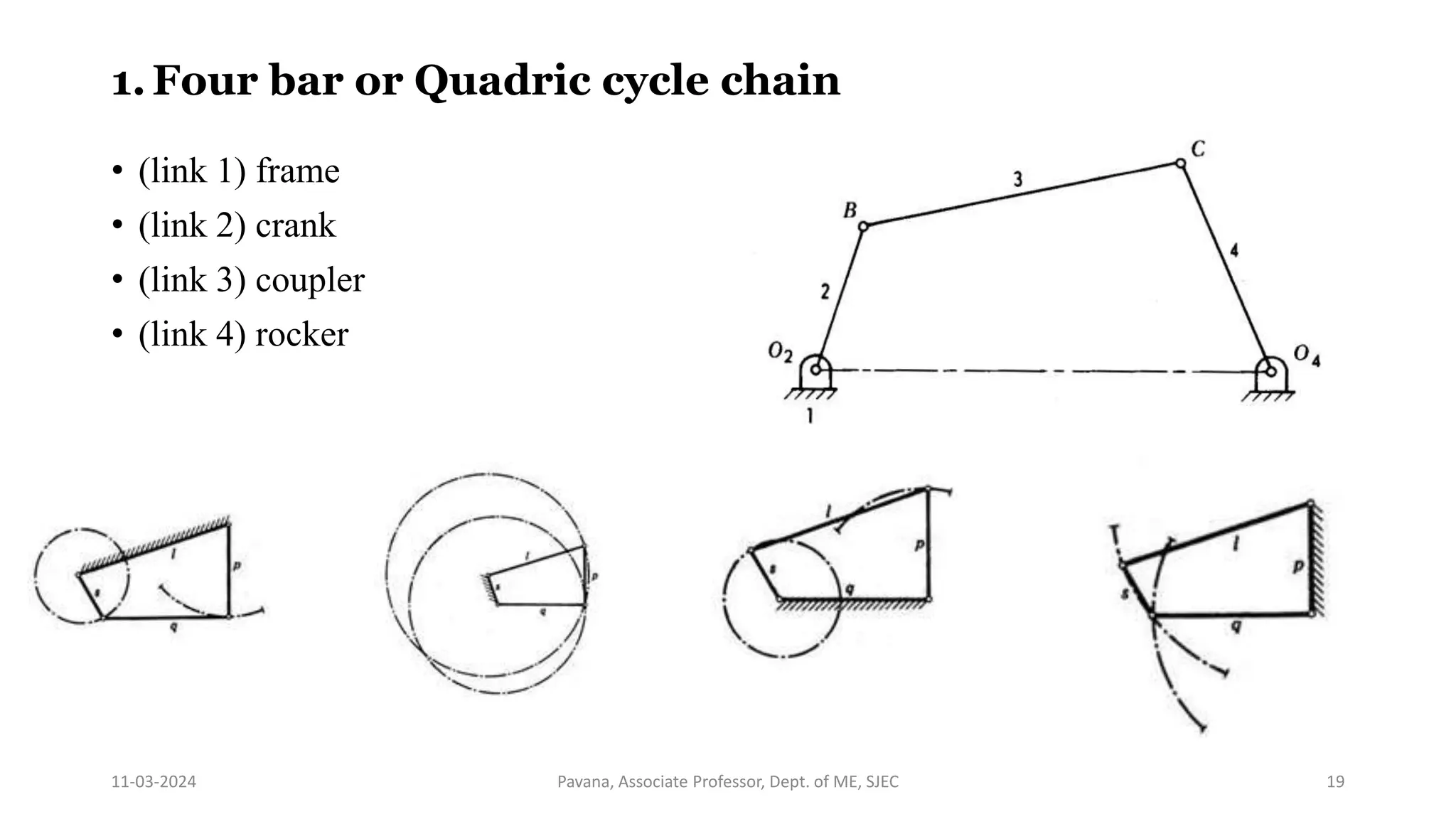
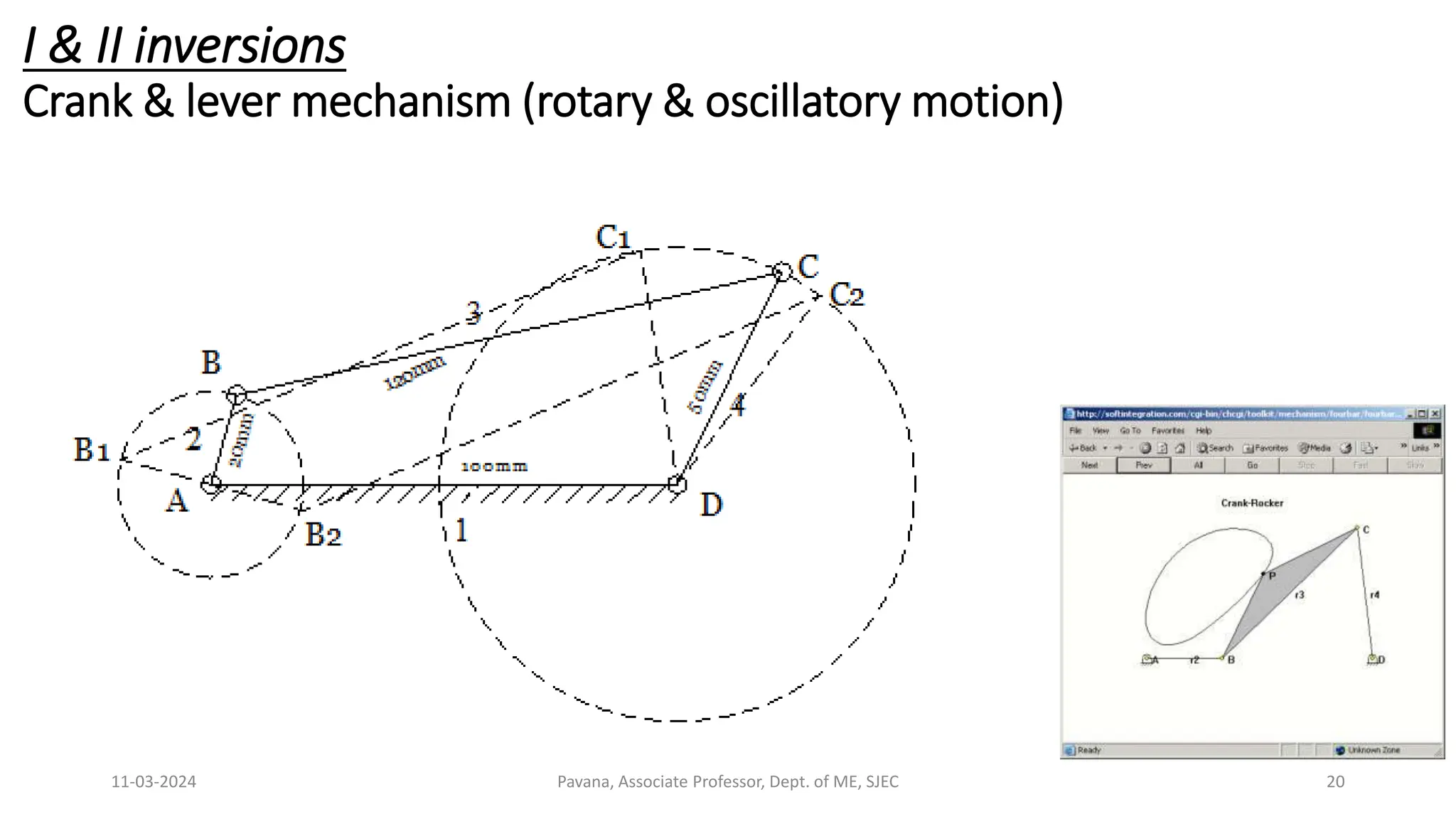
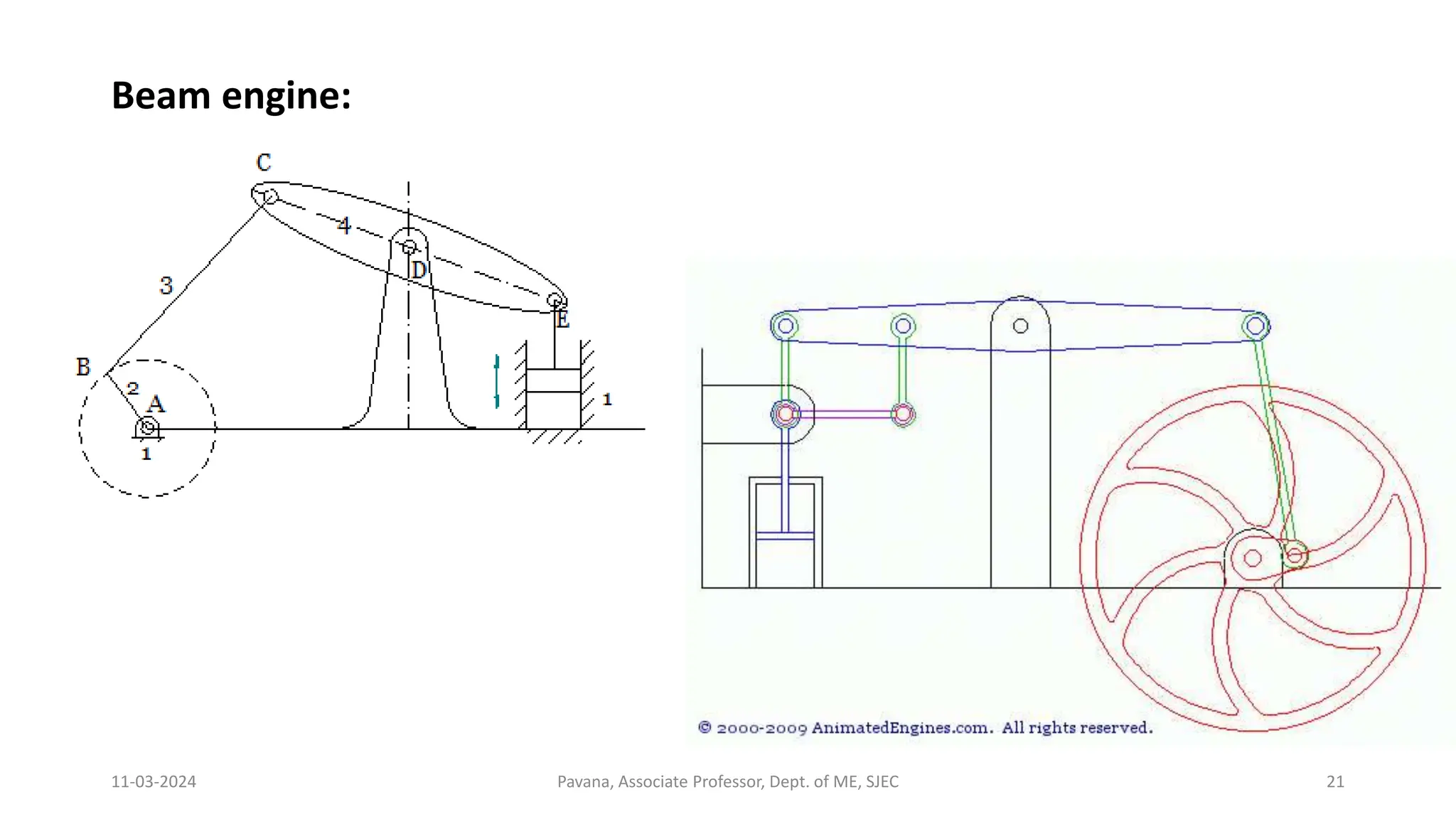
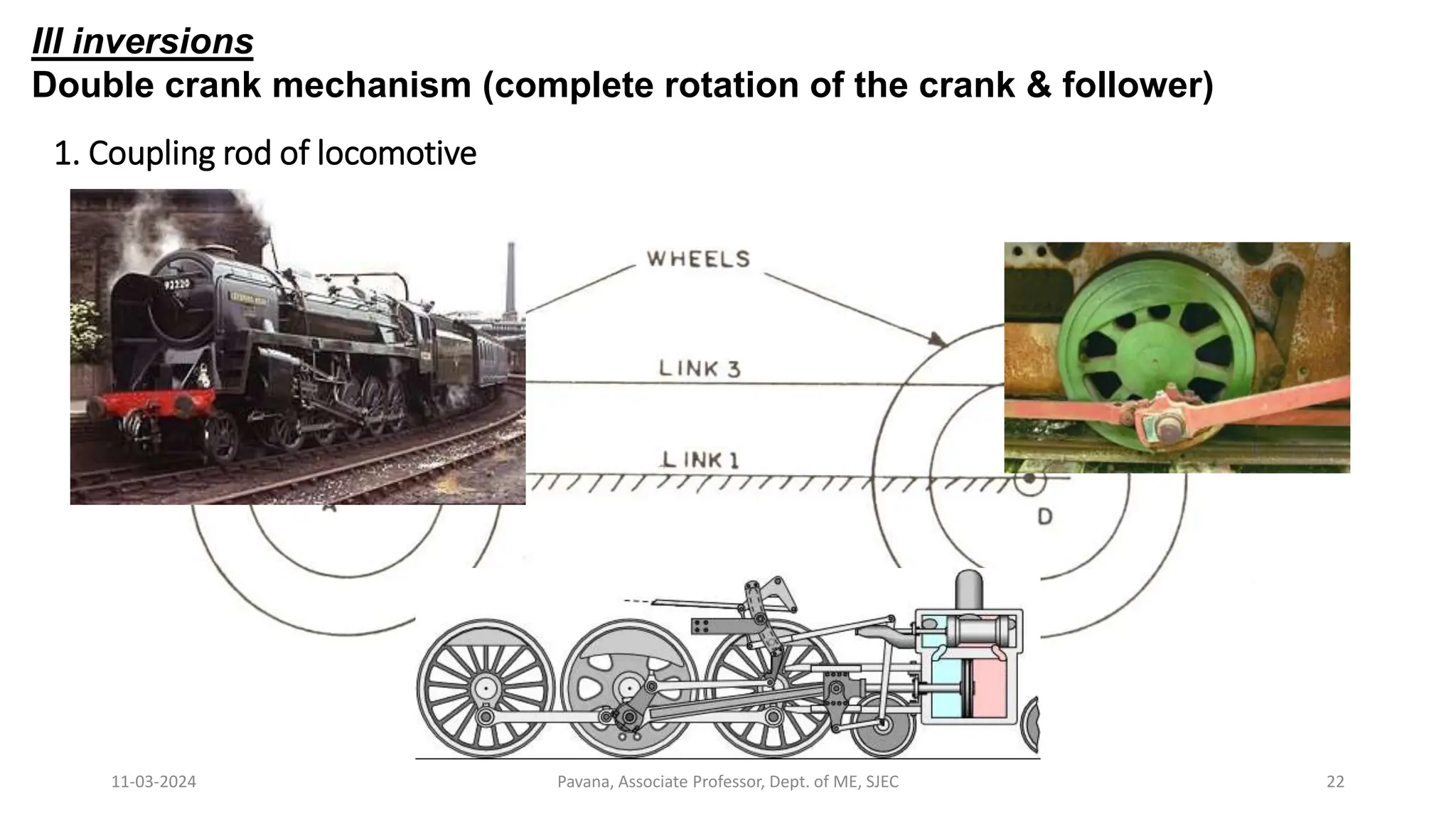
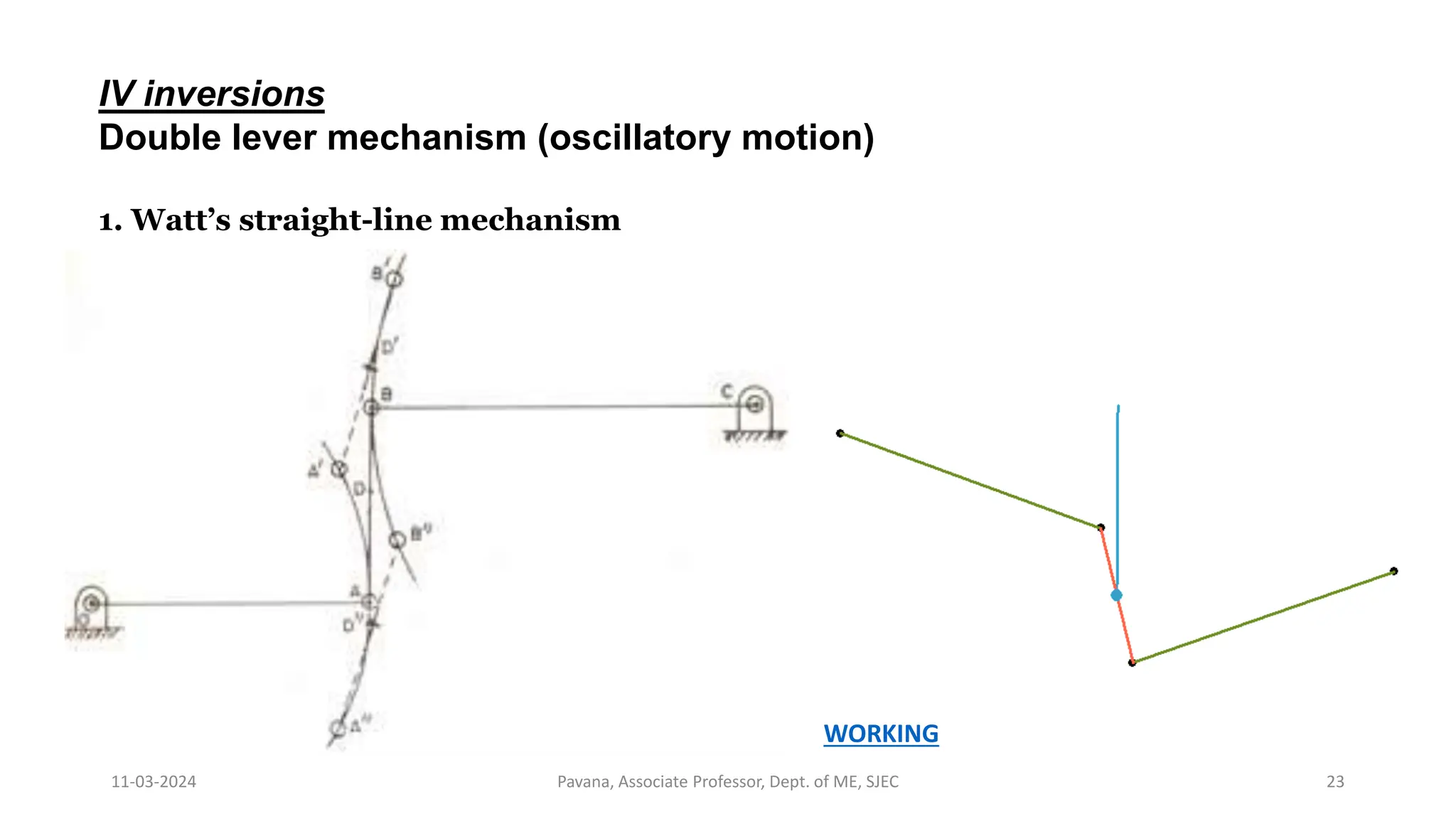
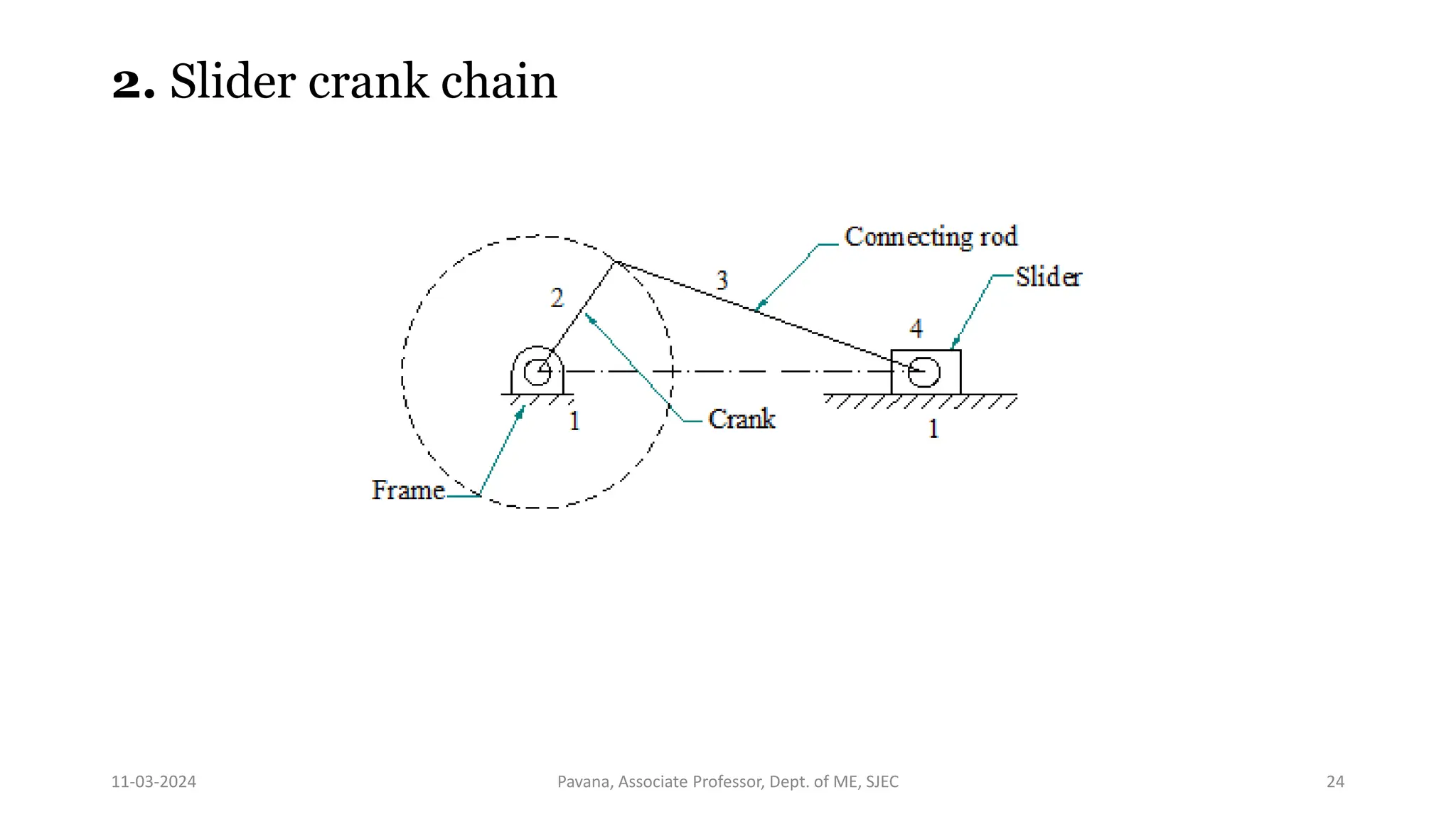
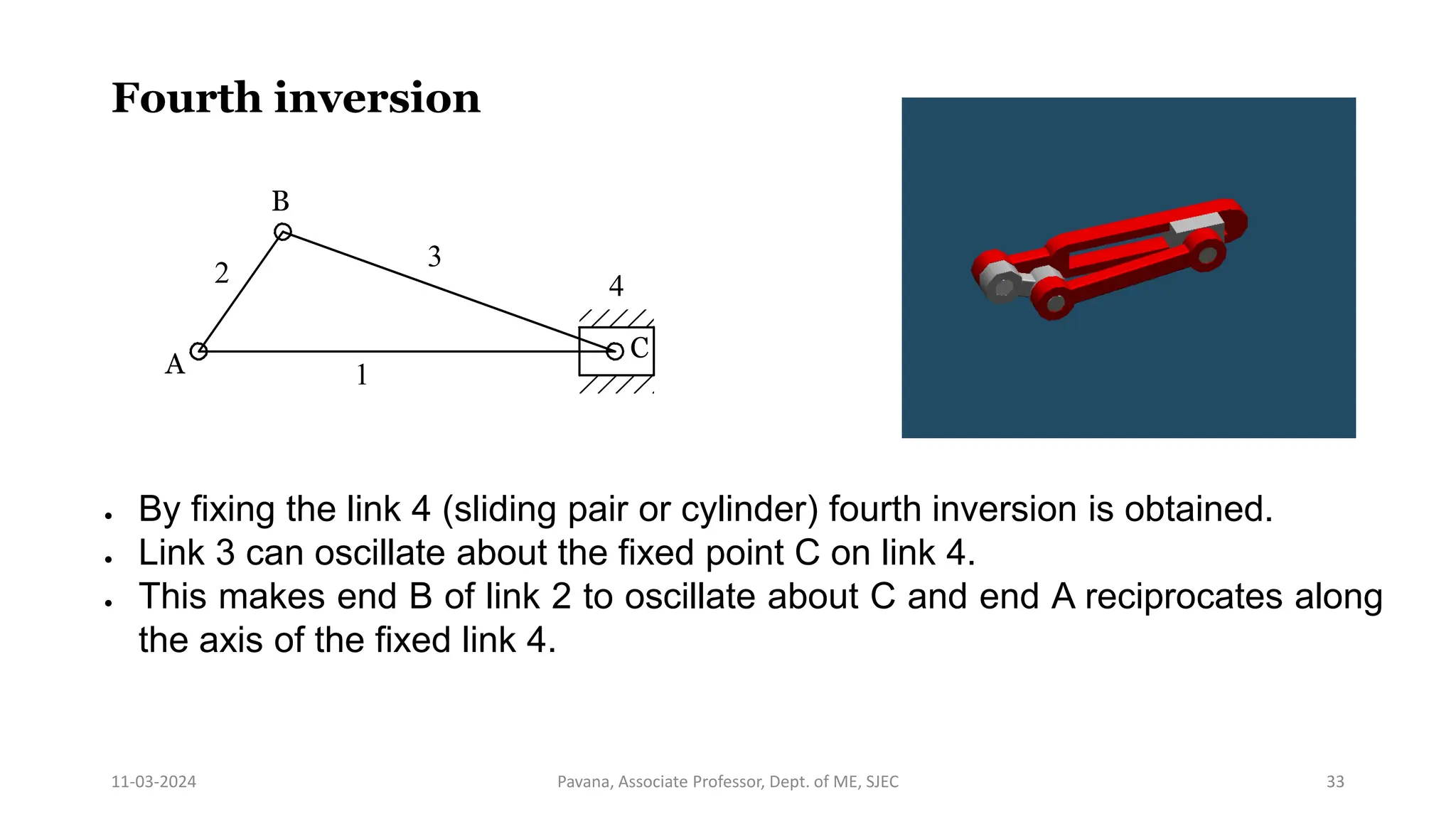
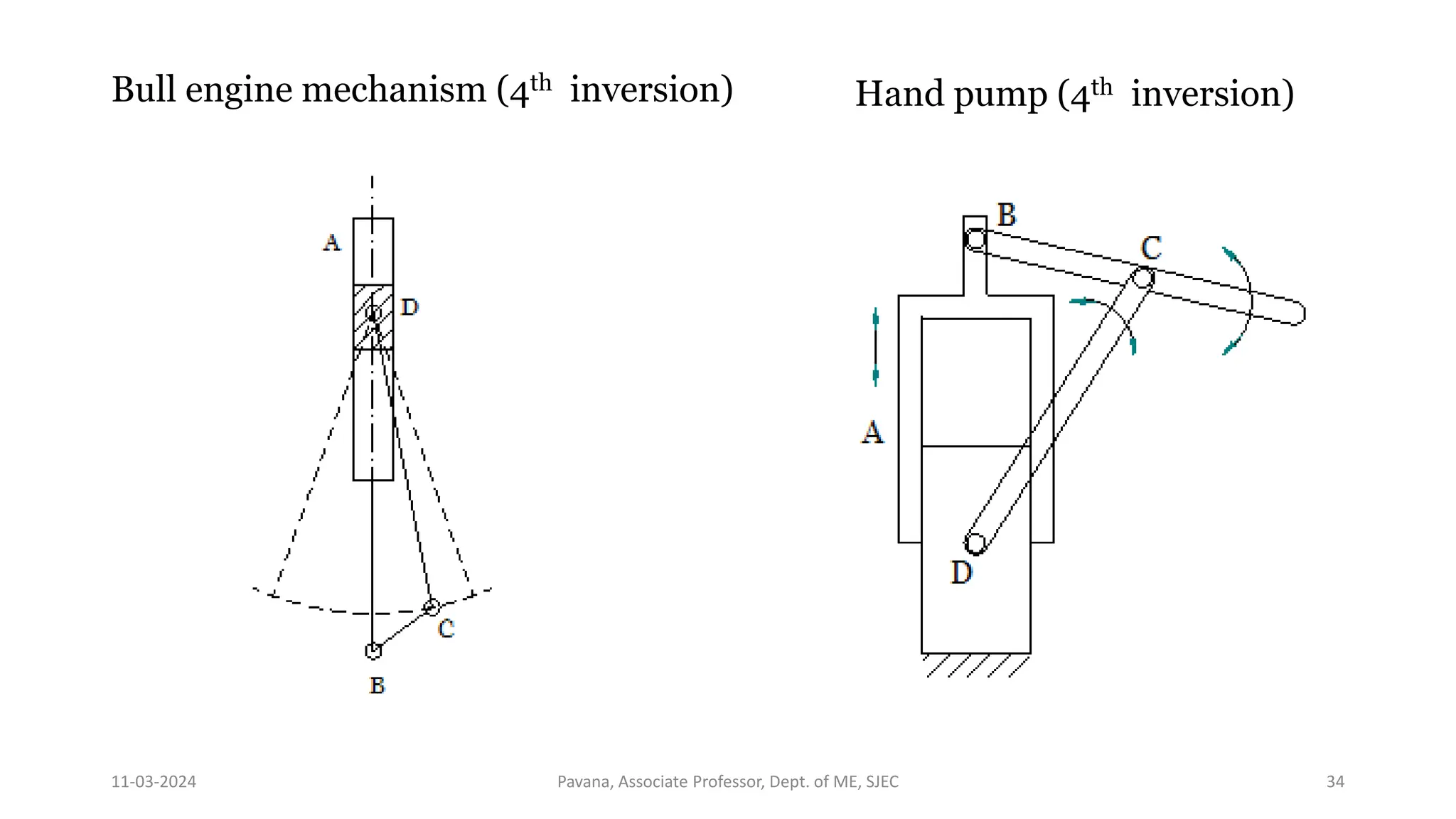
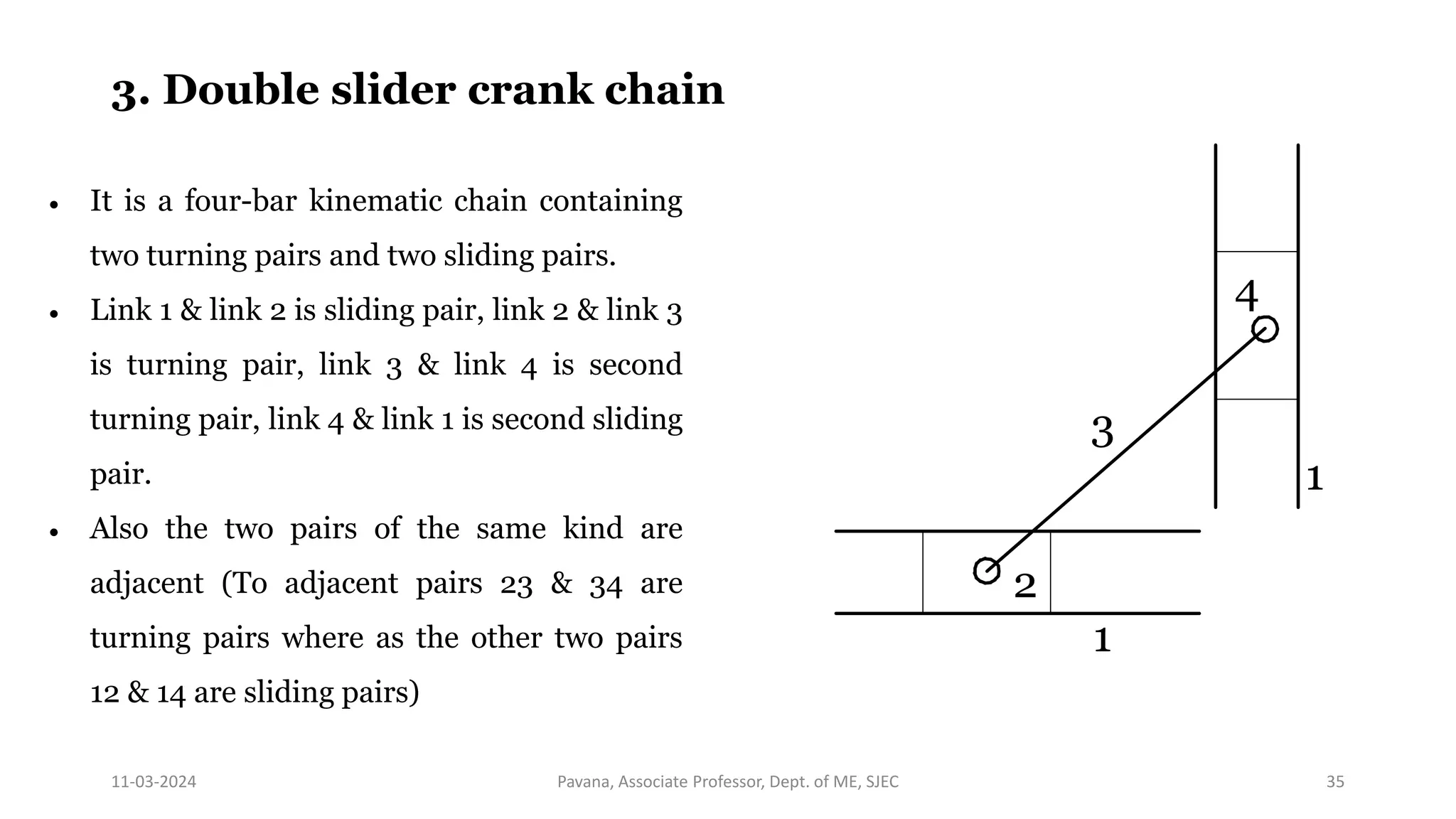
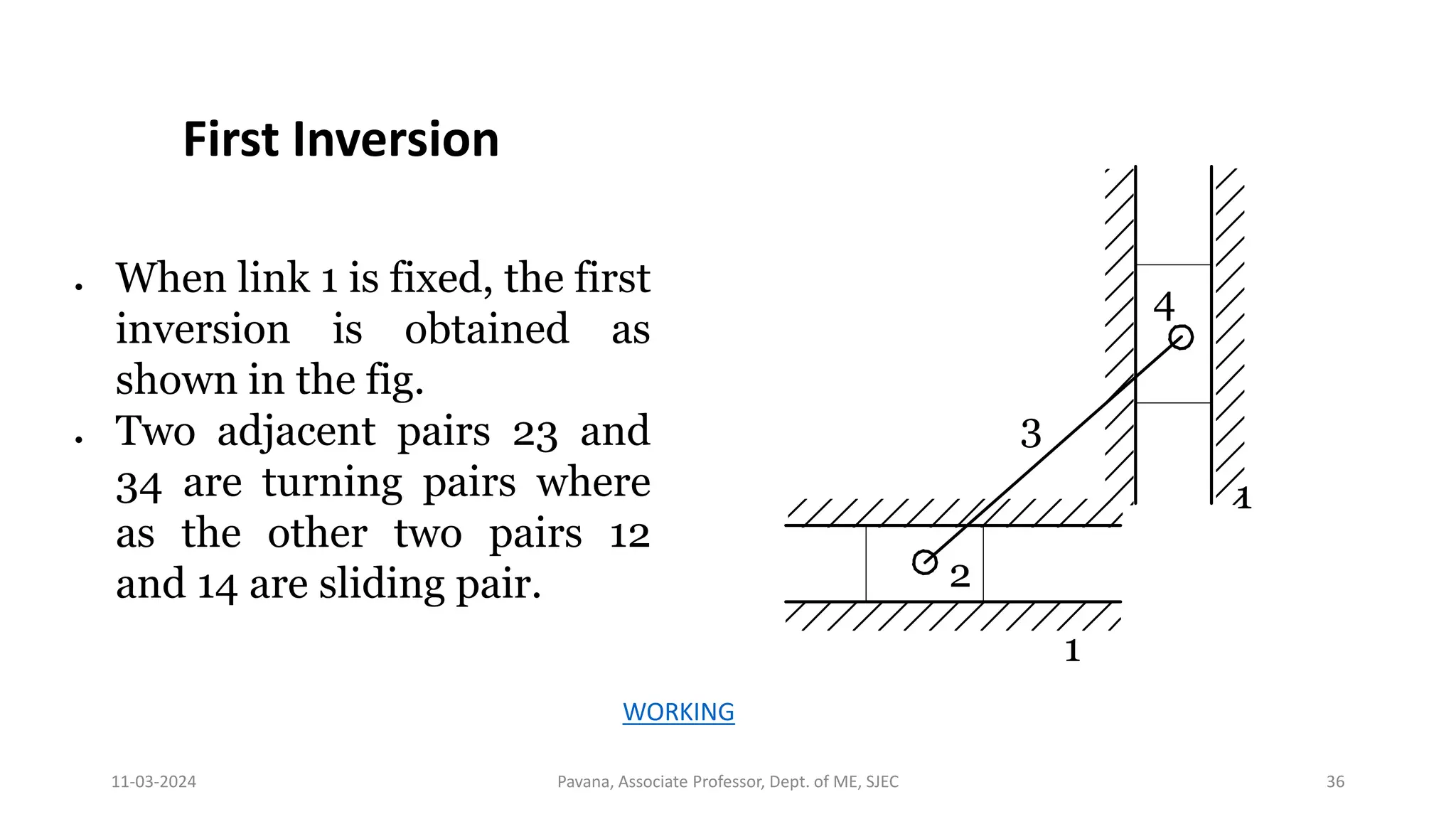
The document outlines the objectives and outcomes of a course on the theory of machines, covering fundamental concepts such as kinematic pairs, chains, and degrees of freedom. Key topics include the analysis of mechanisms, balancing of rotating components, and the principles of cams, governors, and gears. Additionally, it differentiates between machines and structures, mechanisms and machines, and explores the concept of inversions in kinematic chains.