Downloaded 20 times
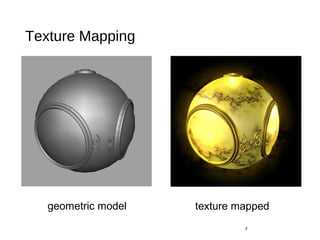
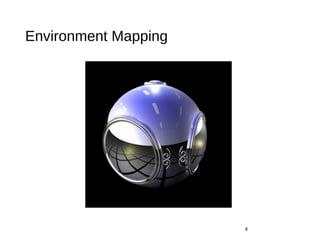
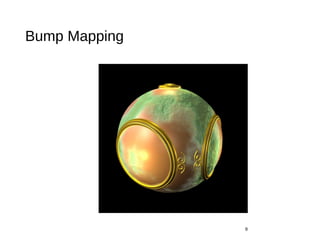
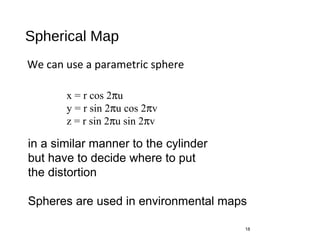
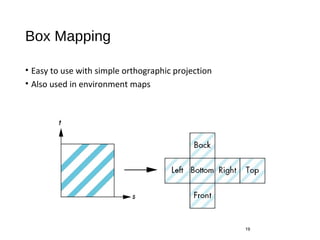
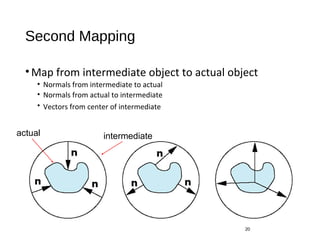
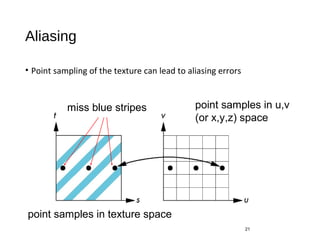

The document discusses various techniques in texture mapping, including texture mapping, environment mapping, and bump mapping, highlighting the challenges in modeling complex surfaces. It explains the need for mapping methods and the multiple coordinate systems involved in mapping, as well as addressing mapping issues like aliasing. Solutions such as two-part mapping and intermediate surfaces are proposed to tackle these challenges effectively.