TensorFlowの使い方(in Japanese) TensorFlowの使い方の簡単なまとめ。 ※完結したソースから学びたいという人には向きません。 A1701talk how-to-use-tensorflow-170125
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
推論部の例 I
def inference(images , hidden1_units , hidden2_units):
"""Build the MNIST model
Args:
images: Images placeholder , from inputs().
hidden1_units: Size of the first hidden layer.
hidden2_units: Size of the second hidden layer.
Returns:
softmax_linear: Output tensor with the computed logits.
"""
# Hidden 1
with tf.name_scope('hidden1 '):
weights = tf.Variable(
tf.truncated_normal([IMAGE_PIXELS , hidden1_units],
stddev=1.0 / math.sqrt(float(IMAGE_PIXELS))),
name='weights ')
biases = tf.Variable(tf.zeros([hidden1_units]),
name='biases ')
hidden1 = tf.nn.relu(tf.matmul(images, weights) + biases)
# Hidden 2
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 4 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-4-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
推論部の例 II
with tf.name_scope('hidden2 '):
weights = tf.Variable(
tf.truncated_normal([hidden1_units , hidden2_units],
stddev=1.0 / math.sqrt(float(hidden1_units))),
name='weights ')
biases = tf.Variable(tf.zeros([hidden2_units]),
name='biases ')
hidden2 = tf.nn.relu(tf.matmul(hidden1 , weights) + biases)
# Linear
with tf.name_scope('softmax_linear '):
weights = tf.Variable(
tf.truncated_normal([hidden2_units , NUM_CLASSES],
stddev=1.0 / math.sqrt(float(hidden2_units))),
name='weights ')
biases = tf.Variable(tf.zeros([NUM_CLASSES]),
name='biases ')
logits = tf.matmul(hidden2 , weights) + biases
return logits
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 5 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-5-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
モデルを記述するためのデータ構造
入力層: 入力データの配列 (28 ∗ 28 = 784 次元のデータならそれだ
けの配列)
重み変数: 入力データ数次元の重みベクトル(隠れ層ノードの数)
バイアス変数: 隠れ層ノードの数の配列
出力層: 出力データの配列と出力用活性化関数の定義 (識別ならソ
フトマックス関数)
x = tf.placeholder(tf.float21 , [None, 784])
W = tf.Variable(tf.zeros([784, 10]
b = tf.Variable(tf.zero([10])
y = tf.nn.softmax(tf.matmul(x, W)+b)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 13 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-13-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
誤差関連処理
交差エントロピー、誤差伝搬型関数 (学習率も) の定義
y_ = tf.placeholder(tf.float32 , [None, 10])
corss_entropy = tf.reduce_mean(-tf.reduce_sum(y_ * tf.log(y),
reduction_indices=[1])
train_step =
tf.train.GradientDescentOptimizer(0.5).minimize(cross_entropy)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 14 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-14-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
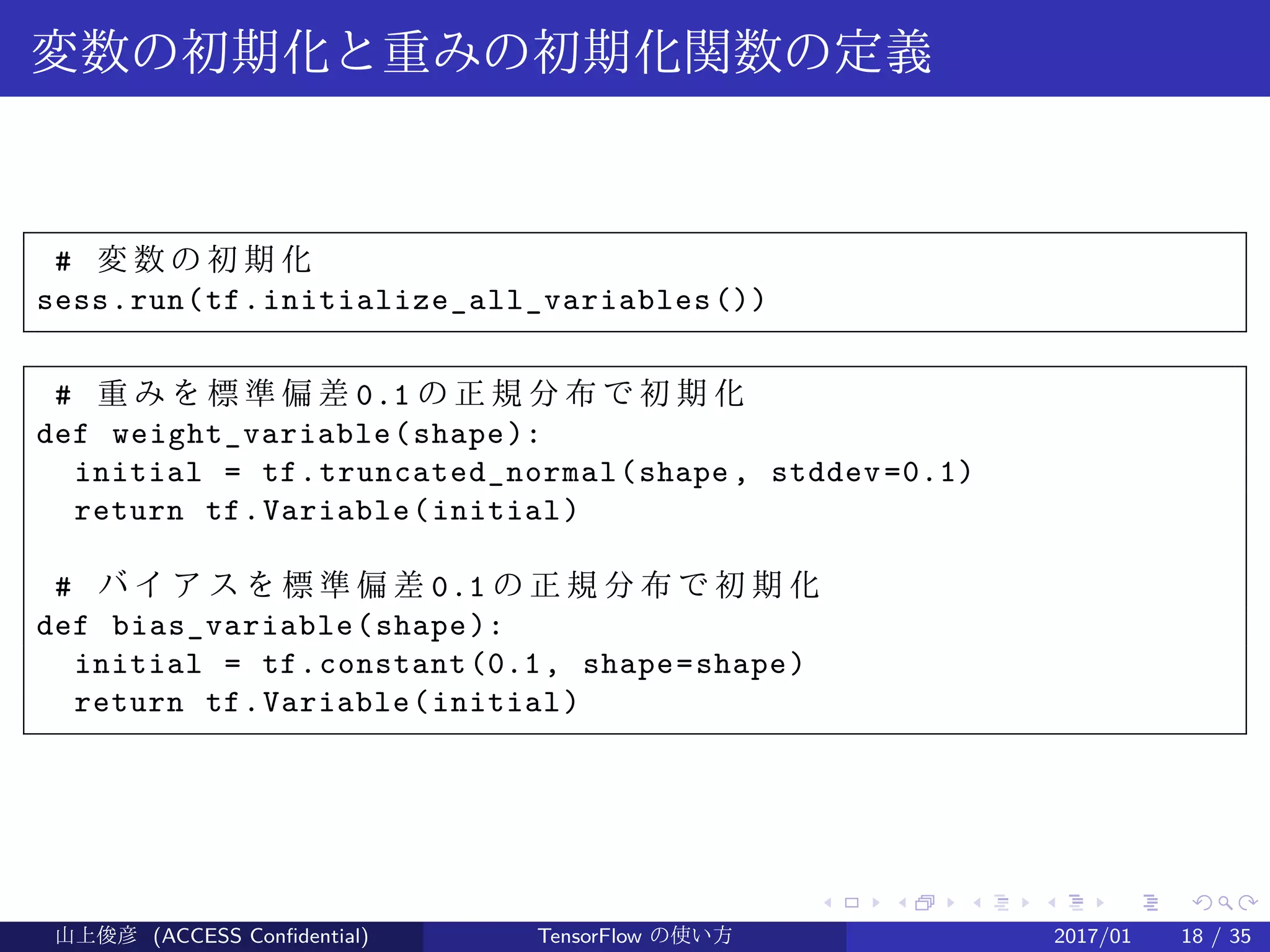
補足:ランダムやゼロで初期化する例
# 正 規 分 布 で 初 期 化
w_h = tf.Variable(tf.random_normal([784, 625], mean=0.0,
stddev=0.05))
w_o = tf.Variable(tf.random_normal([625, 10], mean=0.0,
stddev=0.05))
# ゼ ロ で 初 期 化
b_h = tf.Variable(tf.zeros([625]))
b_o = tf.Variable(tf.zeros([10]))
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 19 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-19-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
畳み込みのストライドとプーリングの設定
# 畳 み 込 み 層 の 作 成
def conv2d(x, W):
return tf.nn.conv2d(x, W, strides=[1, 1, 1, 1], padding='SAME')
# プ ー リ ン グ 層 の 作 成
def max_pool_2x2(x):
return tf.nn.max_pool(x, ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1], padding='SAME')
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 20 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-20-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
活性化関数 (例では ReLU 関数) とプーリング実施 (定義済)
W_conv1 = weight_variable([5, 5, 1, 32])
b_conv1 = bias_variable([32])
# 入力を 28x28x1 に変形
x_image = tf.reshape(x, [-1,28,28,1])
# 畳 み 込 み 層 1を ReLU 関 数 で 設 定
h_conv1 = tf.nn.relu(conv2d(x_image , W_conv1) + b_conv1)
# Max プ ー リ ン グ を 設 定
h_pool1 = max_pool_2x2(h_conv1)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 21 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-21-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 つの畳み込み層の高密度結合層の実現
W_fc1 = weight_variable([7 * 7 * 64, 1024])
b_fc1 = bias_variable([1024])
h_pool2_flat = tf.reshape(h_pool2 , [-1, 7*7*64])
h_fc1 = tf.nn.relu(tf.matmul(h_pool2_flat , W_fc1) + b_fc1)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 22 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-22-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ソフトマックスは既出だが 2 隠れ層の例
W_fc2 = weight_variable([1024, 10])
b_fc2 = bias_variable([10])
y_conv=tf.nn.softmax(tf.matmul(h_fc1_drop , W_fc2) + b_fc2)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 24 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-24-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
補足: 損失関数の中で疎なラベルを 0–1 の小数に変換の例
concated = tf.concat(1, [indices , labels])
onehot_labels = tf.sparse_to_dense(
concated , tf.pack([batch_size , NUM_CLASSES]), 1.0, 0.0)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 27 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-27-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
デバイスの指定 (GPU)
with tf.Session() as sess:
# デ バ イ ス の 指 定
with tf.device("/gpu:1"):
matrix1 = tf.constant([[3., 3.]])
matrix2 = tf.constant([[2.],[2.]])
product = tf.matmul(matrix1 , matrix2)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 31 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-31-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
参考資料 II
TensorFlow チュートリアル - 熟練者のためのディープ MNIST(翻訳)
http://qiita.com/KojiOhki/items/64a2ee54214b01a411c7
落ちこぼれないための TensorFlow Tutorial コード
http://qiita.com/TomokIshii/items/92a266b805d7eee02b1d (2016 年 4 月)
TensorFlow でアニメゆるゆりの制作会社を識別する
http://kivantium.hateblo.jp/entry/2015/11/18/233834 (2015 年 11 月)
[TF]Tensorflow の学習パラメータの保存と読み込み方法
http://qiita.com/supersaiakujin/items/fc400fc6fa58b3809619 (2016 年 4 月)
TensorFlow : How To : 変数: 作成、初期化、保存そしてロード
http://tensorflow.classcat.com/2016/02/09/tensorflow-how-tos-variables/ (2016 年 2 月)
TensorFlow で学習済みモデルを使用する (Deep MNIST for Experts の応用)
http://walkingmask.hatenablog.com/entry/2016/08/27/032400 (2016 年 8 月)
TensorBoard で処理を可視化する
http://www.mwsoft.jp/programming/tensor/tutorial_tensorboad.html (2016 年 5 月)
TensorFlow : 全結合モデル for MNIST (コード解説)
http://tensorflow.classcat.com/2016/03/11/tensorflow-cc-mechanics-101/ (2016 年 3 月)
Tensorflow_in_ROS のコードを解説する
http://qiita.com/shunchan0677/items/60f8f567359fbbbf9321 (2016 年 11 月)
TensorFlow : CNN – 畳み込みニューラルネットワーク for CIFAR-10 (コード解説)
http://tensorflow.classcat.com/2016/03/12/tensorflow-cc-convolutional-neural-networks/
(2016 年 3 月)
山上俊彦 (ACCESS Confidential) TensorFlow の使い方 2017/01 35 / 35](https://image.slidesharecdn.com/a1701talk-how-to-use-tensorflow-170125-170126023050/75/TensorFlow-in-Japanese-35-2048.jpg)
































![[第2版]Python機械学習プログラミング 第13章](https://cdn.slidesharecdn.com/ss_thumbnails/13-190318023252-thumbnail.jpg?width=640&height=640&fit=bounds)
![[第2版]Python機械学習プログラミング 第14章](https://cdn.slidesharecdn.com/ss_thumbnails/14-190318023253-thumbnail.jpg?width=640&height=640&fit=bounds)



![[第2版]Python機械学習プログラミング 第15章](https://cdn.slidesharecdn.com/ss_thumbnails/15-190318023254-thumbnail.jpg?width=640&height=640&fit=bounds)



































