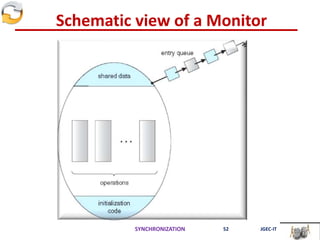
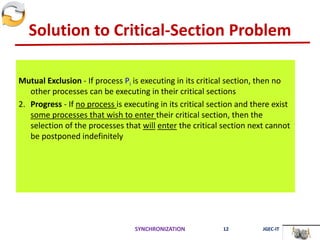
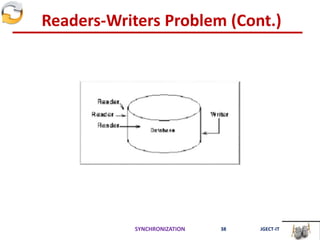
This document presents an overview of process synchronization techniques. It discusses the critical section problem and provides solutions like Peterson's algorithm and semaphores. Classical synchronization problems like the bounded buffer, readers-writers, and dining philosophers problems are explained. The document also covers concepts like deadlock, starvation, and monitors. The objectives are to introduce software and hardware solutions for shared data consistency and describe mechanisms for ensuring atomic transactions.
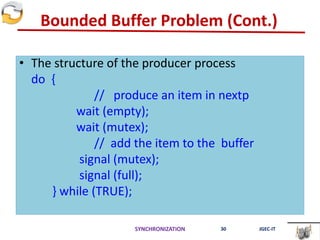
![Producer
while (true) {
/* produce an item and put in nextProduced */
while (count == BUFFER_SIZE)
; // do nothing
buffer [in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
count++;
}
SYNCHRONIZATION 5 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-5-320.jpg)
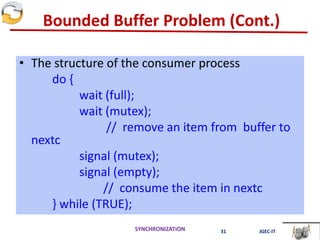
![Consumer
while (true) {
while (count == 0)
; // do nothing
/* consume the item in nextConsumed */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
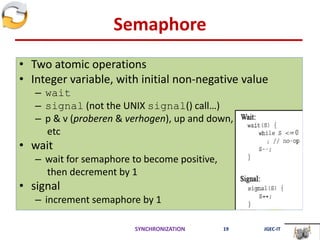
count--;
}
SYNCHRONIZATION 6 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-6-320.jpg)
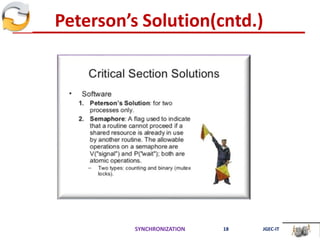
![Peterson’s Solution
• Two process solution
• Assume that the LOAD and STORE instructions are atomic; that is, cannot be
interrupted.
• The two processes share two variables:
– int turn;
– Boolean flag[2]
• The variable turn indicates whose turn it is to enter the critical section.
• The flag array is used to indicate if a process is ready to enter the critical section.
flag[i] = true implies that process Pi is ready!
SYNCHRONIZATION 16 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-16-320.jpg)
![Algorithm for Process Pi
do {
flag[i] = TRUE;
turn = j;
while (flag[j] && turn == j);
critical section
flag[i] = FALSE;
remainder section
} while (TRUE);
• Provable that
1. Mutual exclusion is preserved
2. Progress requirement is satisfied
3. Bounded-waiting requirement is met
SYNCHRONIZATION 17 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-17-320.jpg)
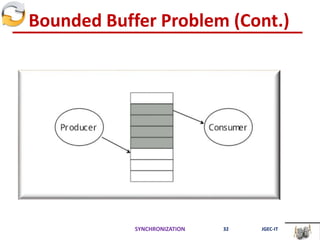
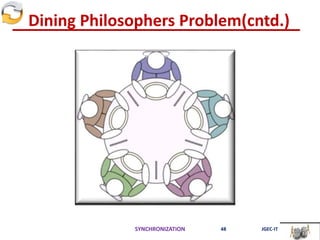
![Dining-Philosophers Problem
SYNCHRONIZATION 44 JGEC-IT
Shared data
Bowl of rice (data set)
Semaphore chopstick [5] initialized to 1](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-44-320.jpg)
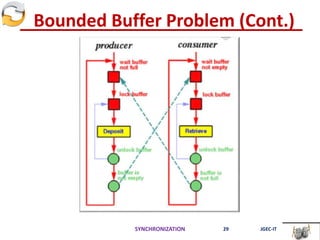
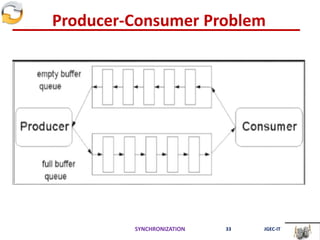
![Dining-Philosophers Problem (Cont.)
• The structure of Philosopher i:
do {
wait ( chopstick[i] );
wait ( chopStick[ (i + 1) % 5] );
// eat
signal ( chopstick[i] );
signal (chopstick[ (i + 1) % 5] );
// think
} while (TRUE);
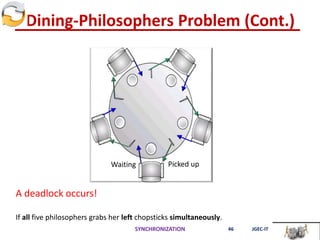
What is the problem with the above?
SYNCHRONIZATION 45 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-45-320.jpg)
![The Structure of Philosopher i
Philosopher i
while ( true ) {
// get left chopstick
chopStick[i].acquire();
// get right chopstick
chopStick[(i + 1) % 5].acquire();
eating();
//return left chopstick
chopStick[i].release( );
// return right chopstick
chopStick[(i + 1) % 5].release( );
thinking();
}
SYNCHRONIZATION 47 JGEC-IT](https://image.slidesharecdn.com/e55728e8-d6ea-470d-986f-fb089582b3e5-161127152037/85/SYNCHRONIZATION-47-320.jpg)