The document discusses process synchronization and solutions to the critical section problem. It describes a bounded buffer problem where a producer and consumer access shared data concurrently. Without synchronization, the final value of shared data like a counter could be incorrect. It presents Peterson's algorithm and solutions using test-and-set and compare-and-swap hardware instructions to synchronize processes and ensure mutual exclusion. Finally, it introduces mutex locks and semaphores as synchronization tools provided by operating systems to solve the critical section problem.

![Bounded-Buffer Problem
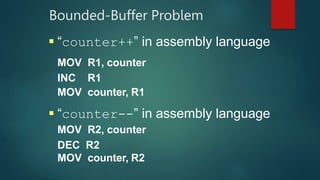
Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0, out = 0;
int counter = 0;](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-3-320.jpg)
![Producer process
item nextProduced;
…
while (1) {
while (counter == BUFFER_SIZE) ;
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
counter++;
}
Bounded-Buffer Problem](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-4-320.jpg)
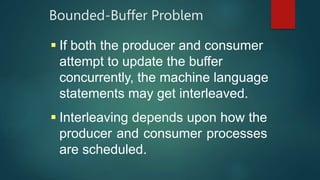
![Bounded-Buffer Problem
Consumer process
item nextConsumed;
while (1) {
while (counter == 0) ;
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
counter--;
}](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-5-320.jpg)














![Peterson’s Algorithm
Combined shared variables of
algorithms 1 and 2.
boolean flag[2]; // Set to false
int turn=0;](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-23-320.jpg)
![Peterson’s Algorithm
Process Pi
do {
critical section
remainder section
} while (1);
flag[ i ] = true;
turn = j;
while (flag[ j ] && turn == j);
flag[ i ] = false;](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-24-320.jpg)







![Bounded-waiting Mutual Exclusion with test_and_set
The common data structures:
boolean waiting[n];
// initialized to false
boolean lock;
// initialized to false](https://image.slidesharecdn.com/lecture11osch6synchronization-230115185913-fa089ce8/85/Synchronization-in-os-pptx-32-320.jpg)