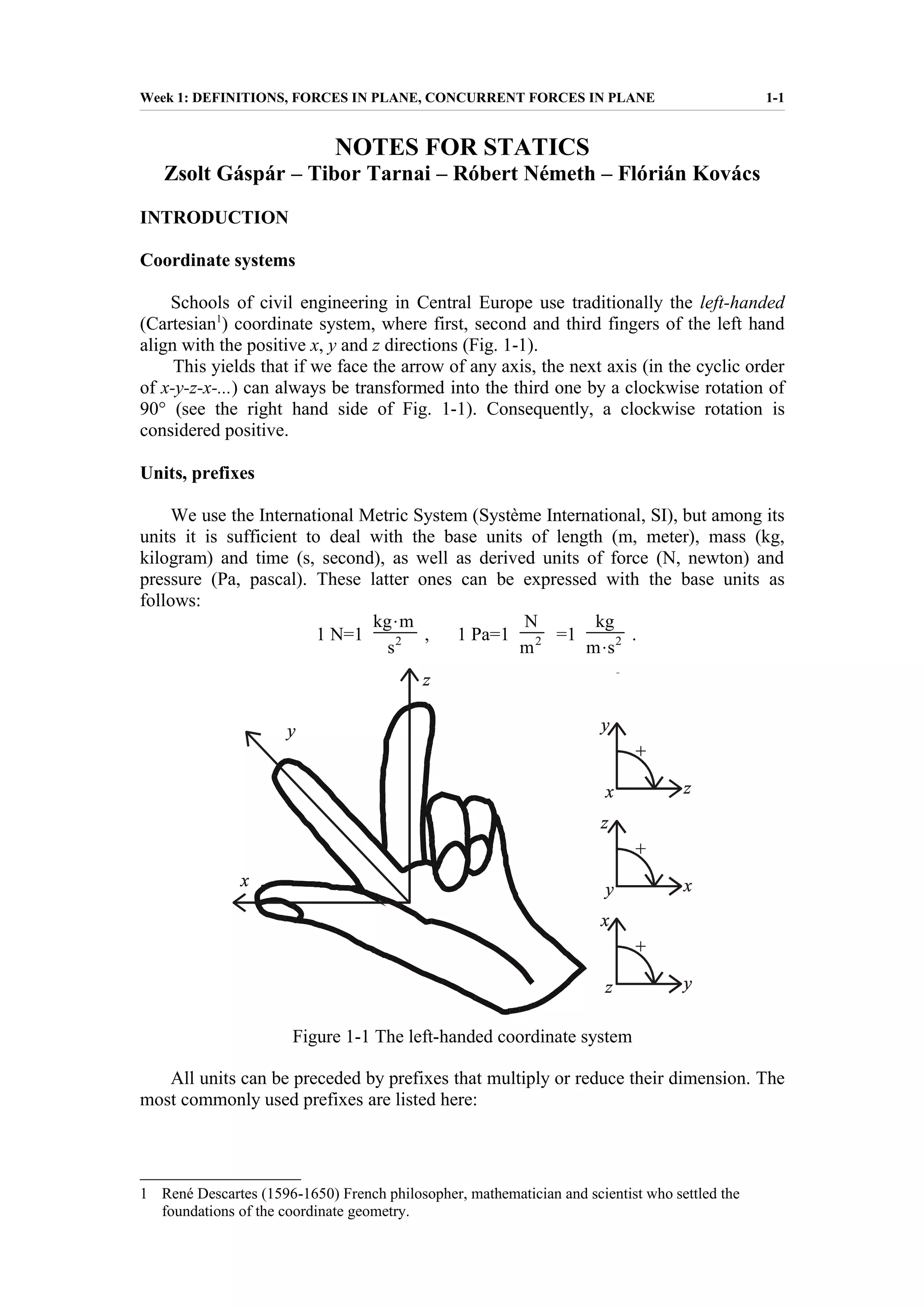
This document provides definitions and concepts related to mechanics, forces, and statics. It introduces coordinate systems, units of measurement, and numerical accuracy. Newton's laws of motion are defined. Vectors are described including operations like addition, subtraction, and dot and cross products. Forces are classified as concentrated or distributed. Statics deals with forces acting on bodies at rest.