Download to read offline








![NPTEL – Physics – Mathematical Physics - 1
Example problems
1. Prove that (𝐴⃗x𝐵⃗⃗) . (𝐴⃗x𝐵⃗⃗) = 𝐴2 𝐵2- (𝐴⃗. 𝐵⃗⃗)2
Solution
(𝐴⃗ × 𝐵⃗⃗)2 = 𝐴2𝐵2𝑠𝑖𝑛2(𝐴⃗, 𝐵⃗⃗)
Where sin (𝐴⃗, 𝐵⃗⃗) is the angle between vectors 𝐴⃗ and 𝐵⃗⃗
Thus (𝐴⃗ × 𝐵⃗⃗)2 = 𝐴2𝐵2 [1- 𝑐𝑜𝑠2(𝐴⃗, 𝐵
⃗⃗)]
= 𝐴2𝐵2 - 𝐴2𝐵2 𝑐𝑜𝑠2 (𝐴⃗, 𝐵⃗⃗)
=𝐴2𝐵2 - (𝐴⃗. 𝐵⃗⃗)2
(proved)
2. Derive the law of sines, i.e. prove
𝐴 𝐵
𝑠𝑖𝑛 𝛼 𝑠𝑖𝑛 𝛽 𝑠𝑖𝑛
𝛾
= =
𝐶
where the angles 𝛼, 𝛽 and 𝛾 are defined as follows
Solution:
𝐵⃗⃗ = 𝐶⃗ -
𝐴⃗ Thus 𝐵⃗⃗ x (𝐶⃗ - 𝐴⃗)
= 0
(cross products of two equal vectors is zero)
So 𝐵⃗⃗x𝐶⃗ = 𝐵
⃗⃗x𝐴⃗
BC sin 𝛼 = AB sin (𝜋-𝛾) = AB sin 𝛾
Thus
𝐴 𝐶
𝑠𝑖𝑛 𝛼 𝑠𝑖𝑛
𝛾
= similarly
𝐴
𝑠𝑖𝑛 𝛼 𝑠𝑖𝑛
𝛽
=
𝐵
(proved)
Joint initiative of IITs and IISc – Funded by MHRD Page 9 of 32](https://image.slidesharecdn.com/lec1-231023100645-b014d65c/85/lec1-ppt-9-320.jpg)



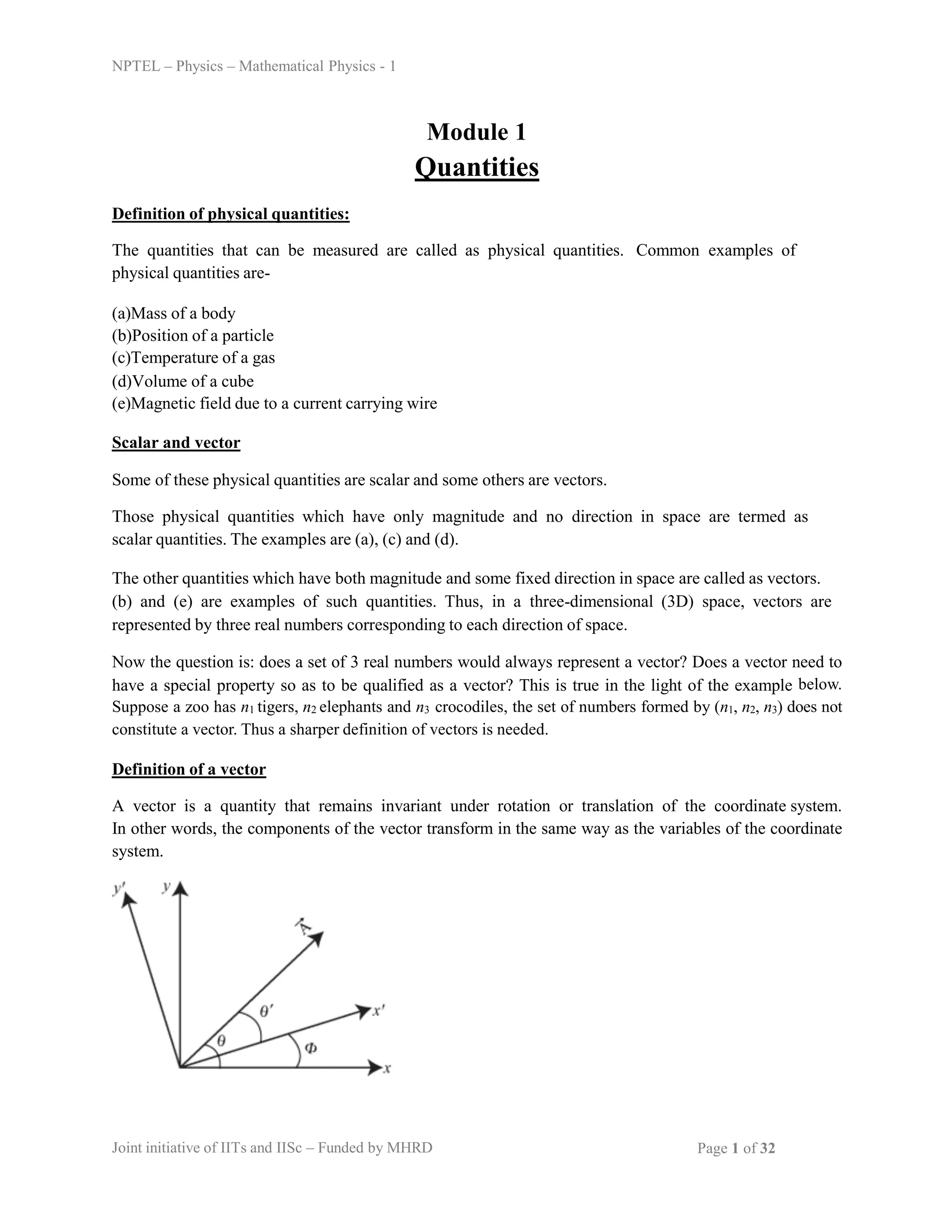
This document defines vectors and scalar quantities, and describes their key properties and relationships. It begins by defining physical quantities that can be measured, and distinguishes between scalar and vector quantities. Scalars have only magnitude, while vectors have both magnitude and direction. The document then provides a more rigorous definition of vectors as quantities that remain invariant under coordinate system rotations or translations. It describes how to represent and transform vectors between different coordinate systems. Vector addition, subtraction, and multiplication operations like the scalar and vector products are defined. Derivatives of vectors are also discussed. Examples of velocity and acceleration vectors in uniform circular motion are provided.