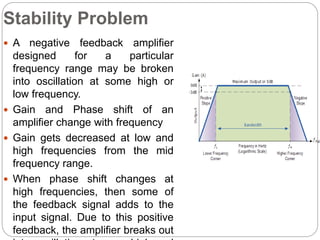
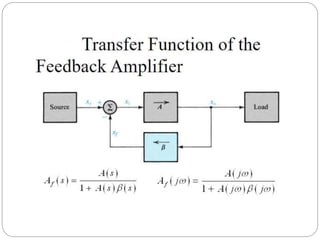
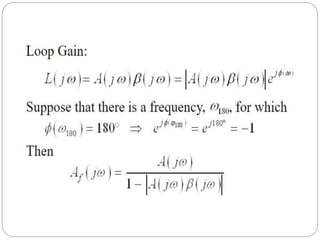
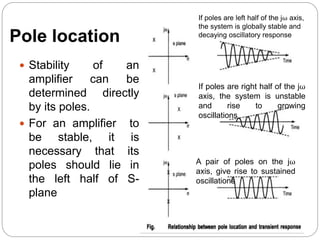
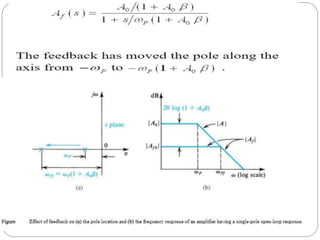
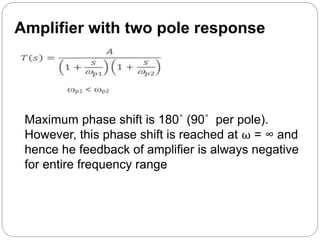
This document discusses stability problems in negative feedback amplifiers. It explains that amplifiers can become unstable if the phase shift exceeds 180 degrees at high frequencies, causing positive feedback. The Nyquist criterion and pole locations are introduced as ways to test stability. Gain and phase margins are also defined. Feedback is shown to shift poles left, improving stability for single and double pole amplifiers, but amplifiers with more poles could become unstable if phase shift exceeds 180 degrees.