Download as PDF, PPTX
![Problem context Mapping onto graphs Graph spectral properties Problem formalization Results
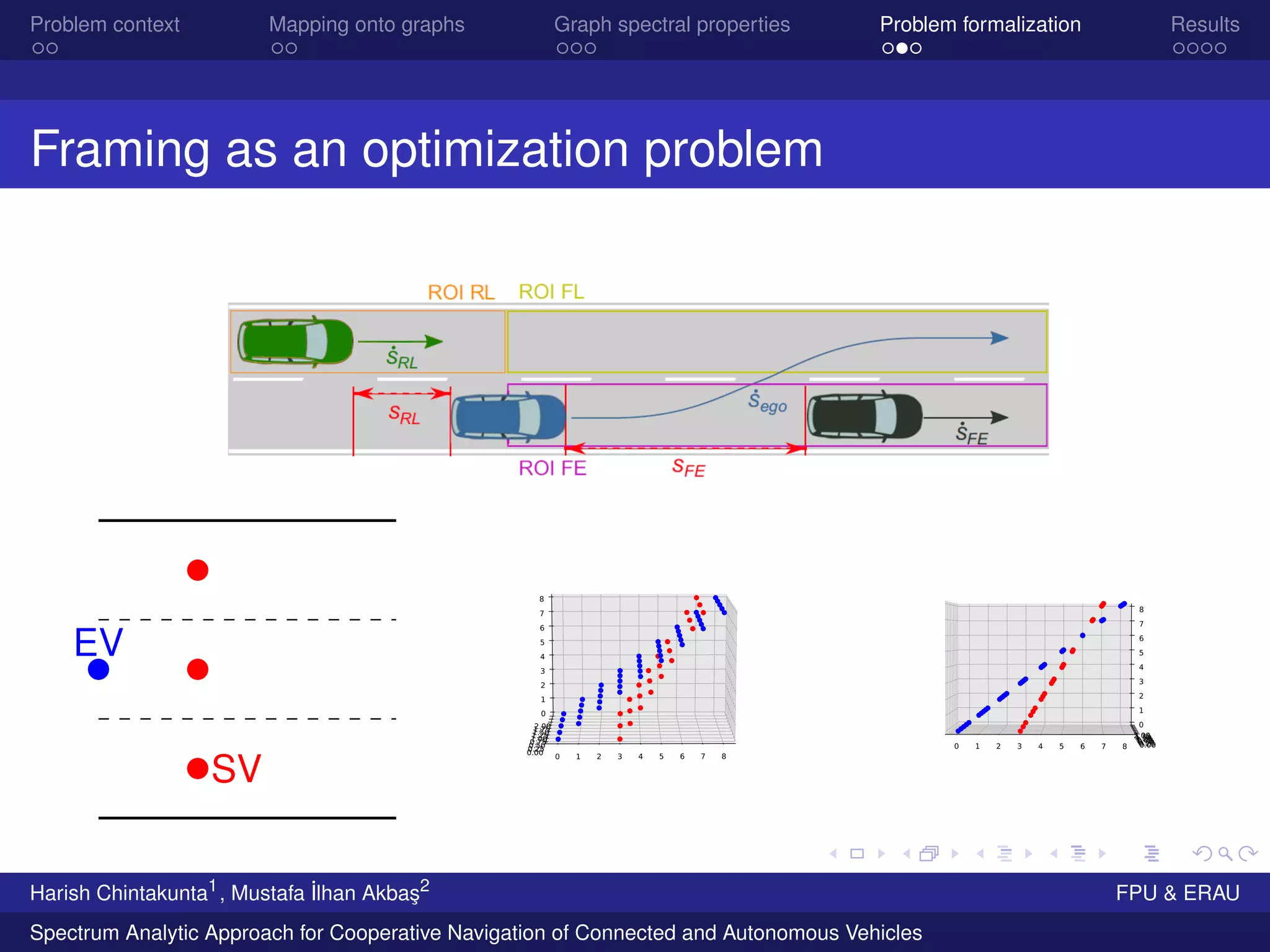
Putting things together
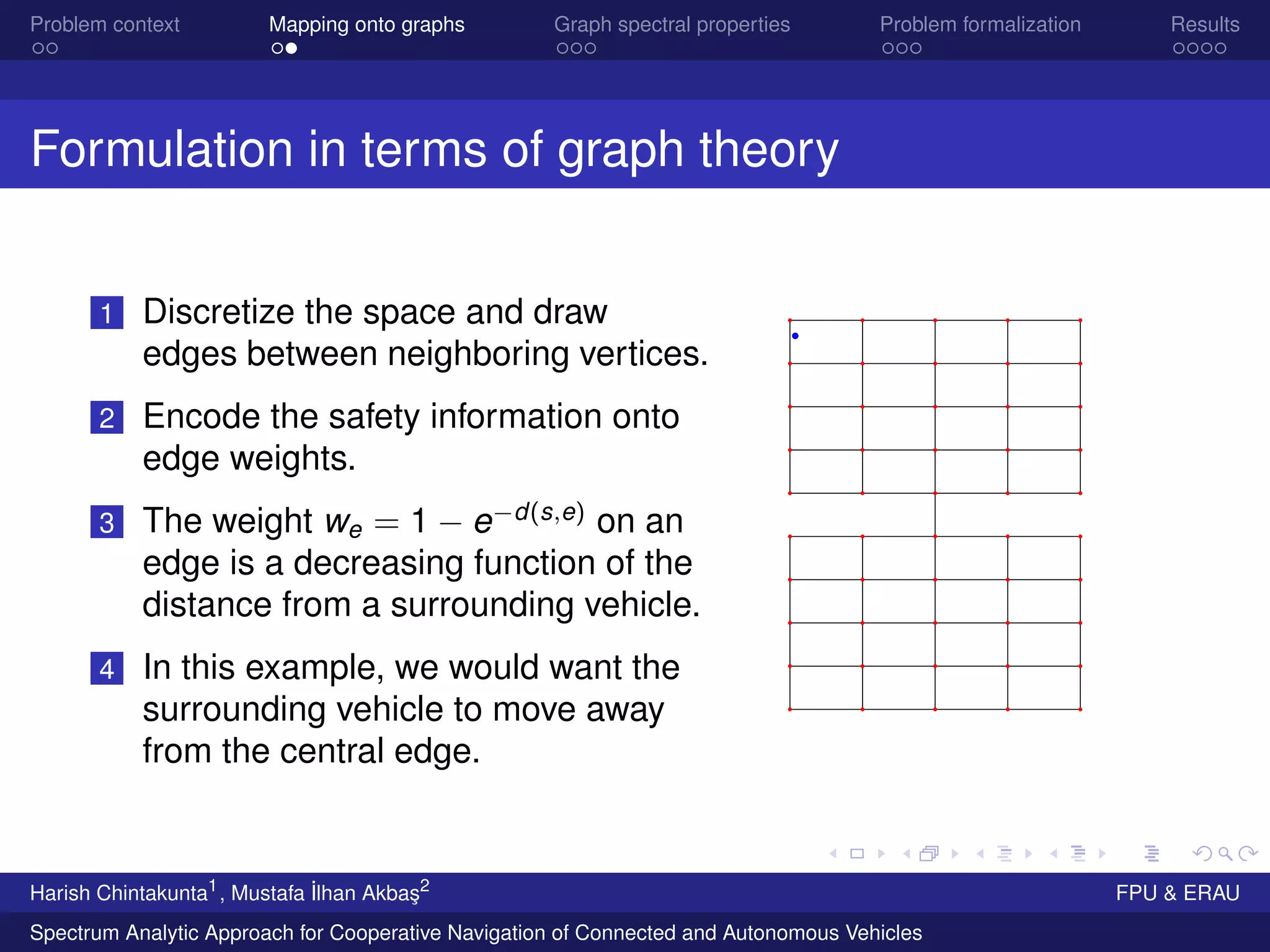
Construct a graph G = (V, E) with discretized points in the
space as vertices, and edges between vertices in a
geometrical neighborhood.
Λ : configuration of the obstacles.
Assign weights wΛ : E → [0, 1], where wΛ(e) is a function
of distances between the edge and all other obstacles.
LΛ((ui, uj)) =
−wΛ((ui, uj)), ui = uj
uk =ui
wΛ((ui, uk )), ui = uj
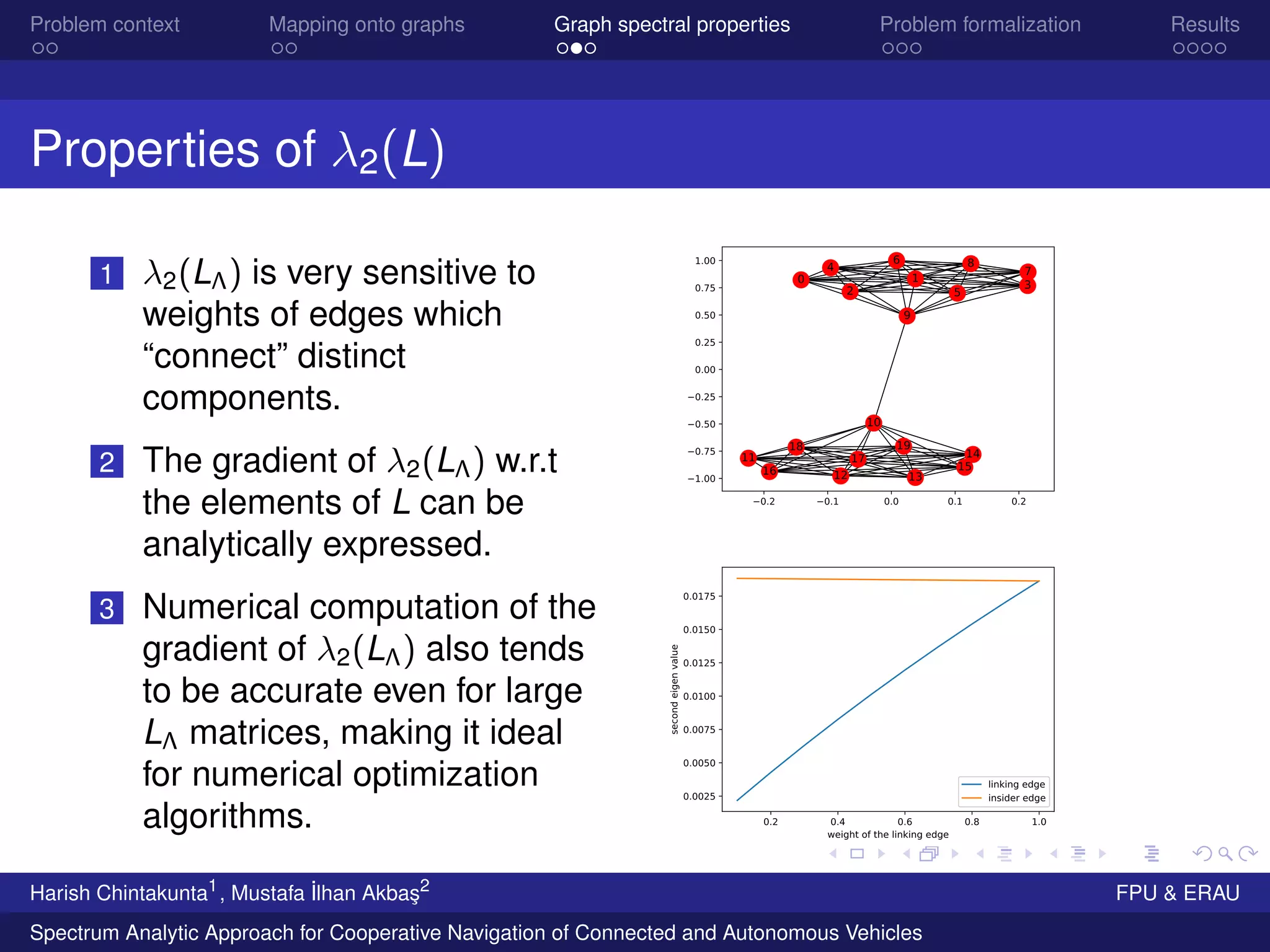
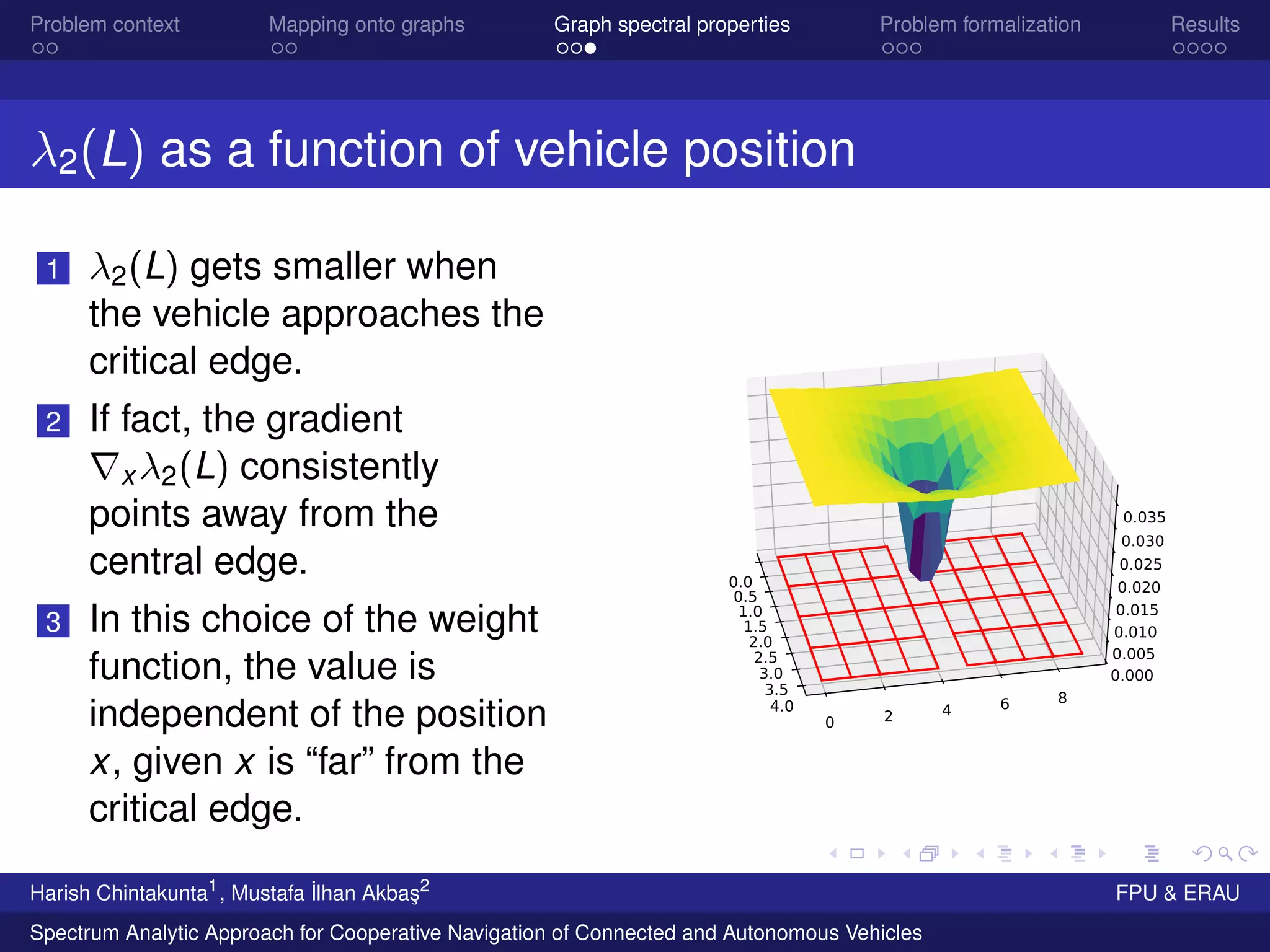
The second eigenvalue λ2(LΛ) will serve as a good
measure for connectivity.
Harish Chintakunta1
, Mustafa ˙Ilhan Akba¸s2
FPU & ERAU
Spectrum Analytic Approach for Cooperative Navigation of Connected and Autonomous Vehicles](https://image.slidesharecdn.com/cansave2presentation-191125183525/75/Spectrum-Analytic-Approach-for-Cooperative-Navigation-of-Connected-and-Autonomous-Vehicles-9-2048.jpg)

The document discusses a spectrum analytic approach for improving the cooperative navigation of connected and autonomous vehicles (CAVs) and emergency vehicles (EVs). It formulates the problem using graph theory to ensure safe navigation by optimizing the configuration and behaviors of surrounding vehicles. The results indicate that adjusting vehicle arrangements based on spectral properties can significantly enhance the safety and efficiency of emergency navigation.





























![[IRTalks@The University of Glasgow] A Topology-aware Analysis of Graph Collab...](https://cdn.slidesharecdn.com/ss_thumbnails/irtalksdanielemalitesta-240213122149-51207659-thumbnail.jpg?width=640&height=640&fit=bounds)

![Community detection in social networks[1]](https://cdn.slidesharecdn.com/ss_thumbnails/communitydetectioninsocialnetworks1-121022180209-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)







































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)










