Download as PDF, PPTX






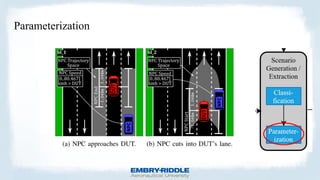
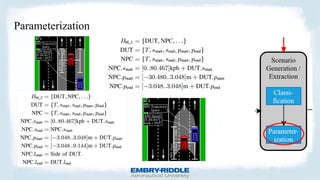
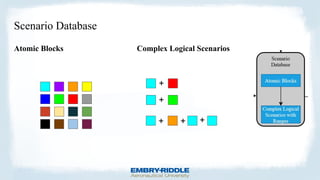
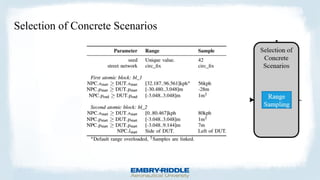


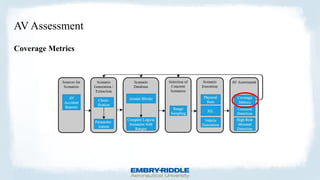



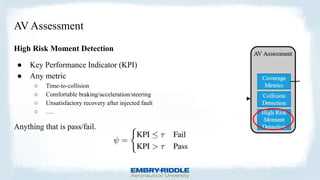

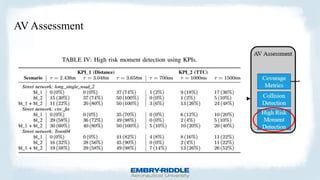




The document discusses the development of a modular framework for validating autonomous vehicles (AVs) using accident data, emphasizing the classification and parameterization of scenarios. It introduces an atomic block framework and outlines methods for scenario selection, execution, and assessment metrics, including collision detection and high-risk moment detection. The end result is a comprehensive database of scenarios sourced from real accident reports that facilitate AV testing and safety improvements.























































![Human Reproduction [ Reproductive System ] Notes @irfanullah_mehar Irfanullah...](https://cdn.slidesharecdn.com/ss_thumbnails/humanreproductionreproductivesystemnotesirfanullahmeharirfanullahmeharjanantantra-260111172350-56e85778-thumbnail.jpg?width=640&height=640&fit=bounds)








