Downloaded 13 times






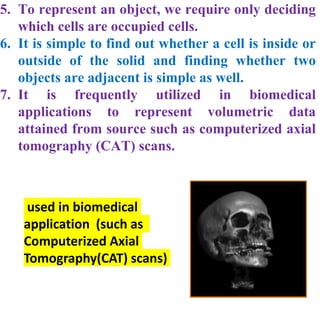






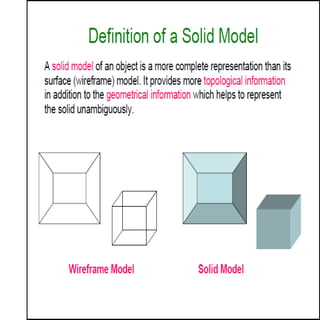















































The document outlines various solid modeling schemes including definitions and representations such as boundary representation (B-rep) and constructive solid geometry (CSG), focusing on cell composition, spatial occupancy enumeration, and the significance of each in biomedical applications. It discusses the advantages and challenges of each representation method, emphasizing solid modeling's completeness and unambiguity. Furthermore, it highlights the use of primitives and boolean operations in CSG, detailing how complex models can be constructed through the combination of simpler shapes.



































![Solids[1]](https://cdn.slidesharecdn.com/ss_thumbnails/solids1-150926053431-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)