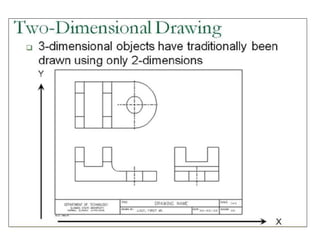
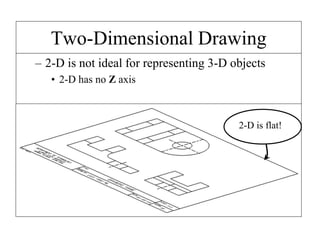
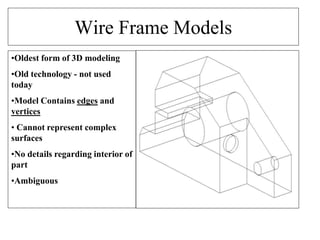
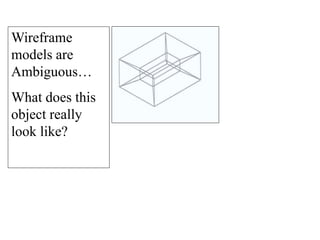
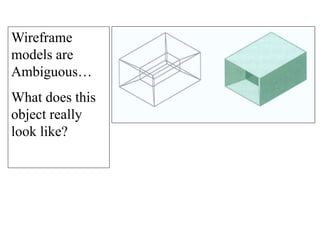
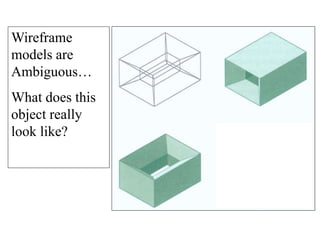
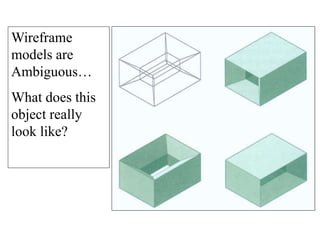
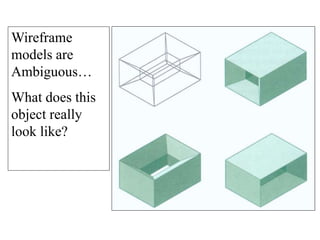
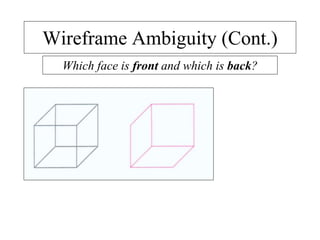
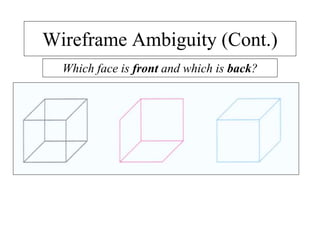
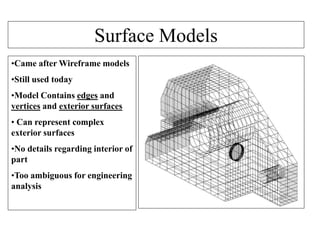
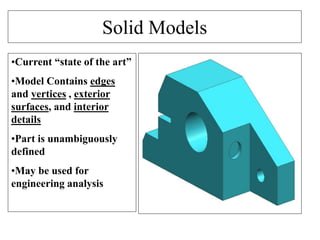
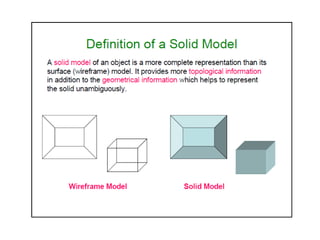
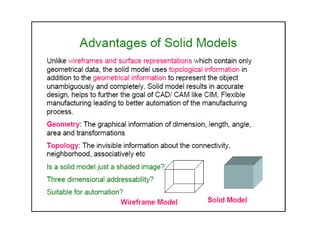
2D drawings are not ideal for representing 3D objects as they lack a Z axis. There are three main types of 3D models: wireframe, surface, and solid models. Wireframe models only contain edges and vertices and cannot represent complex surfaces. Surface models include edges, vertices and exterior surfaces but provide no interior details. Solid models are the current standard as they contain edges, vertices, exterior surfaces and interior details, providing an unambiguous representation of an object that can be used for engineering analysis.