Downloaded 64 times


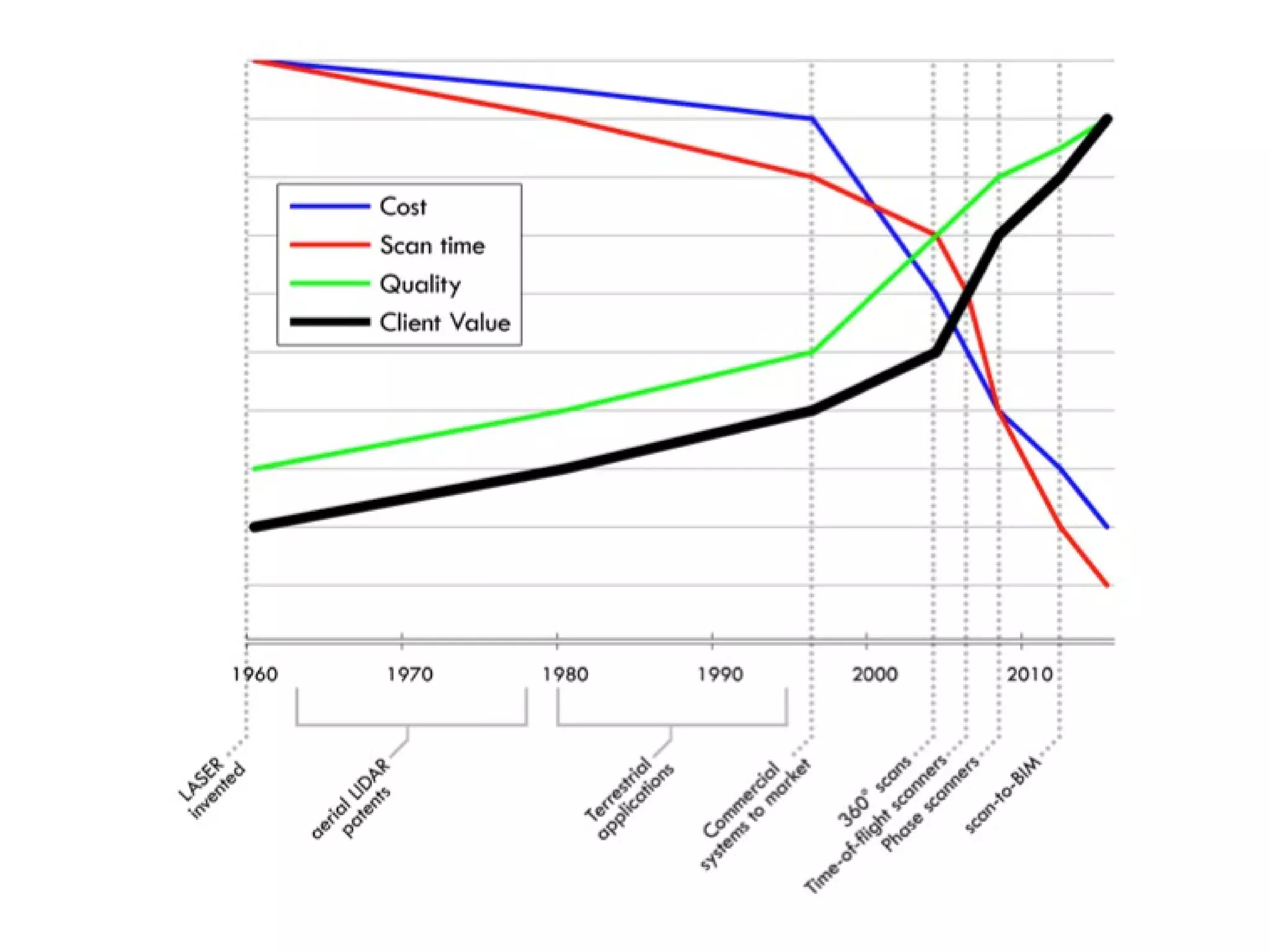


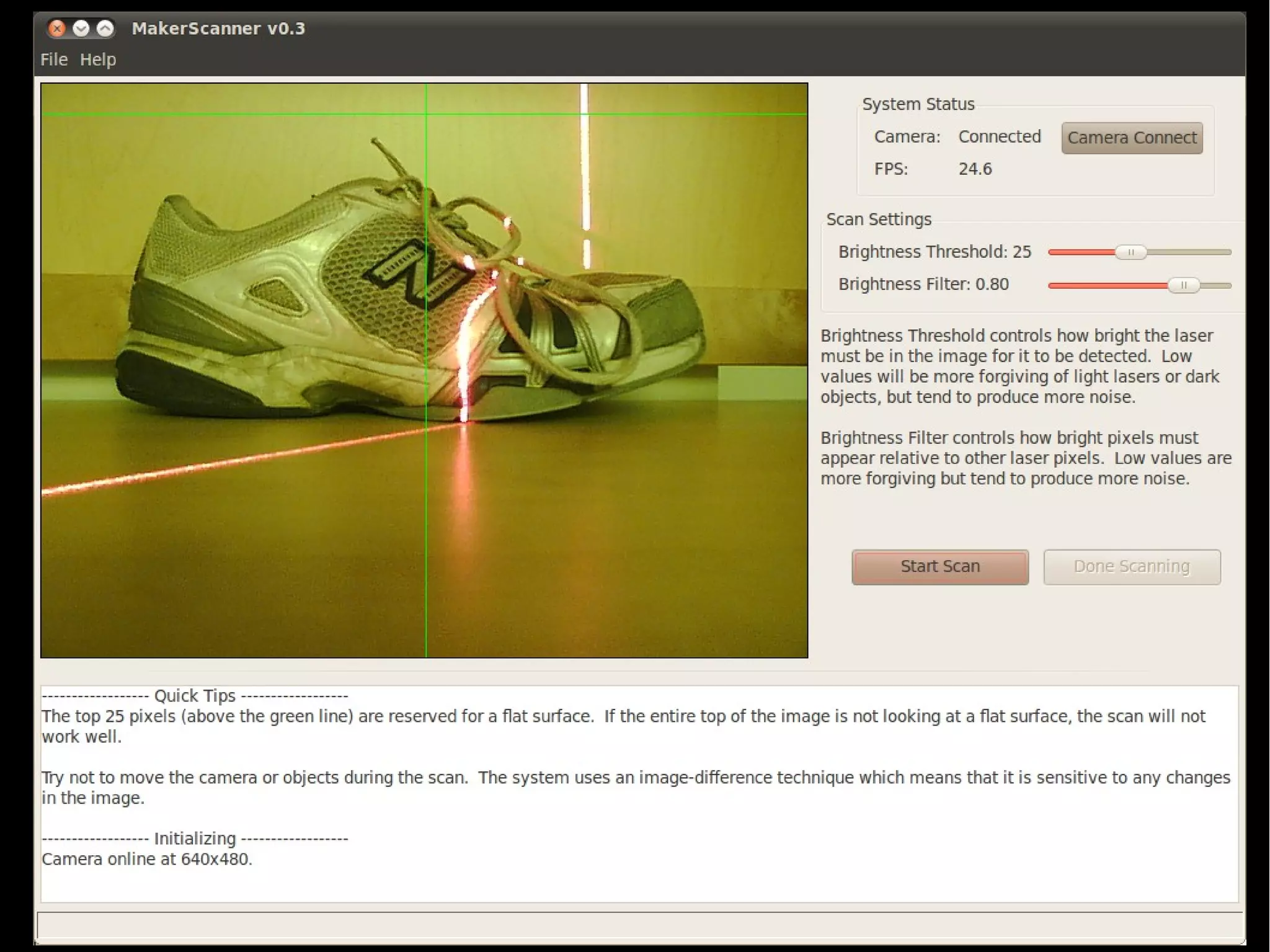


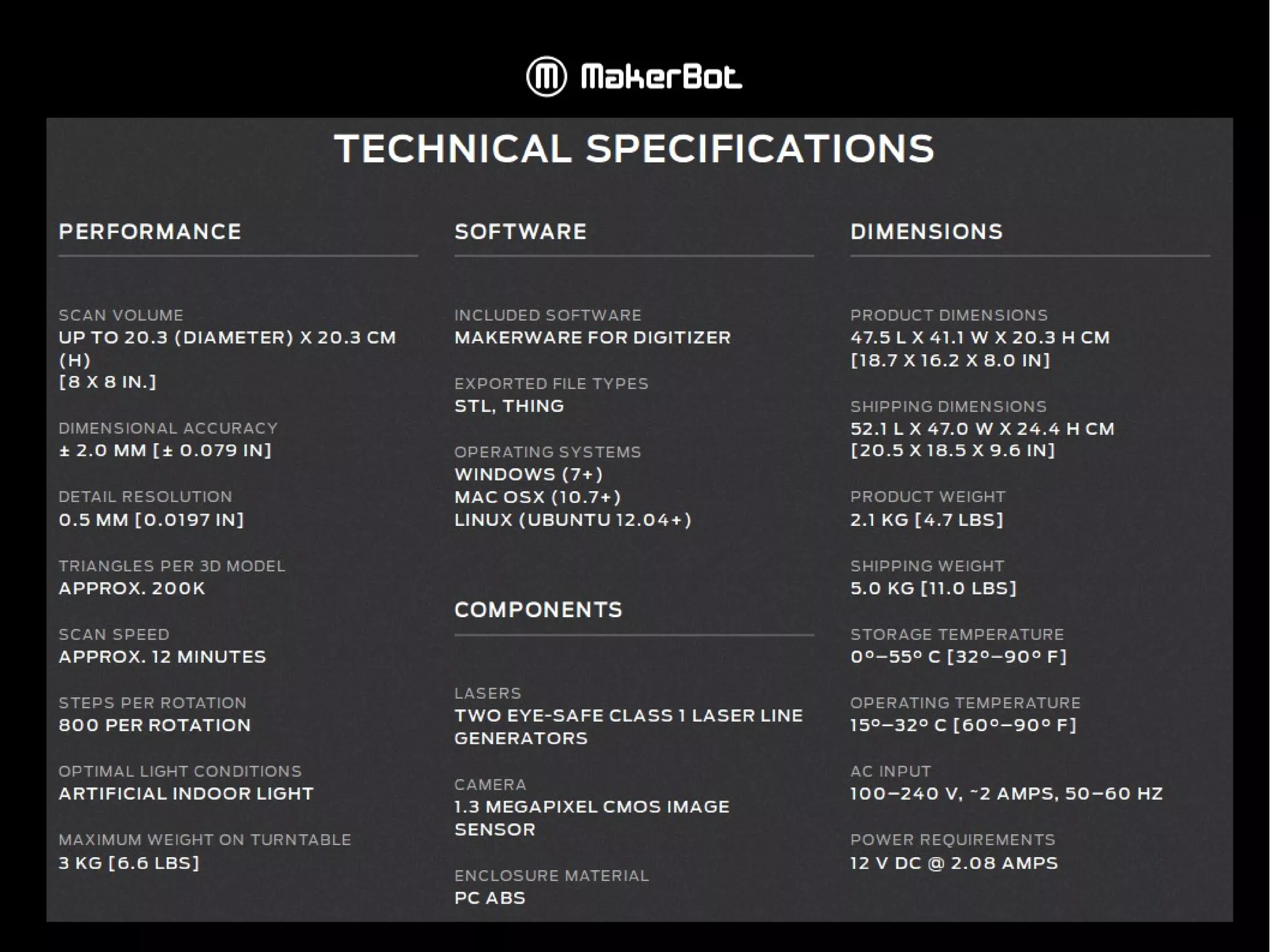

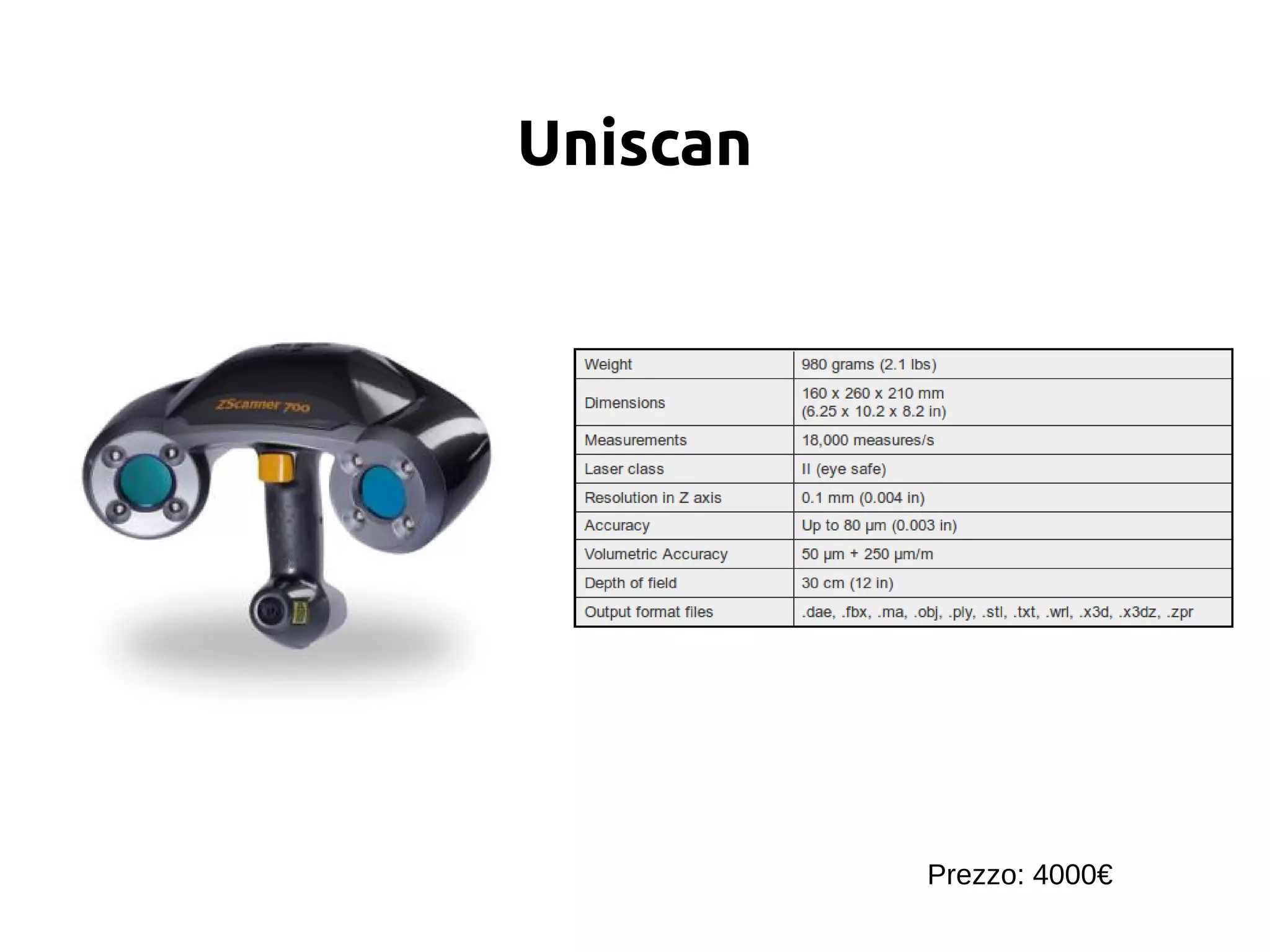
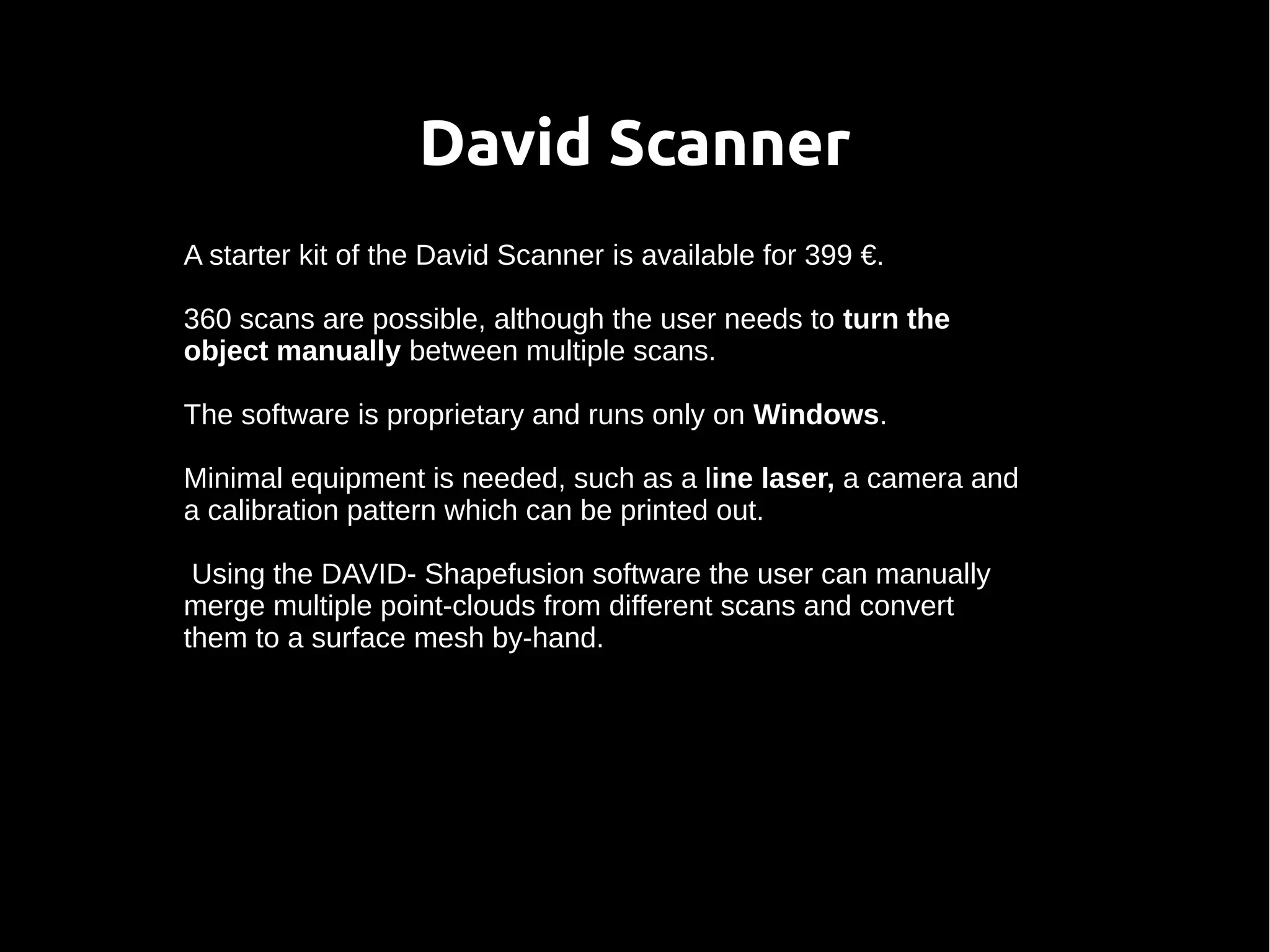
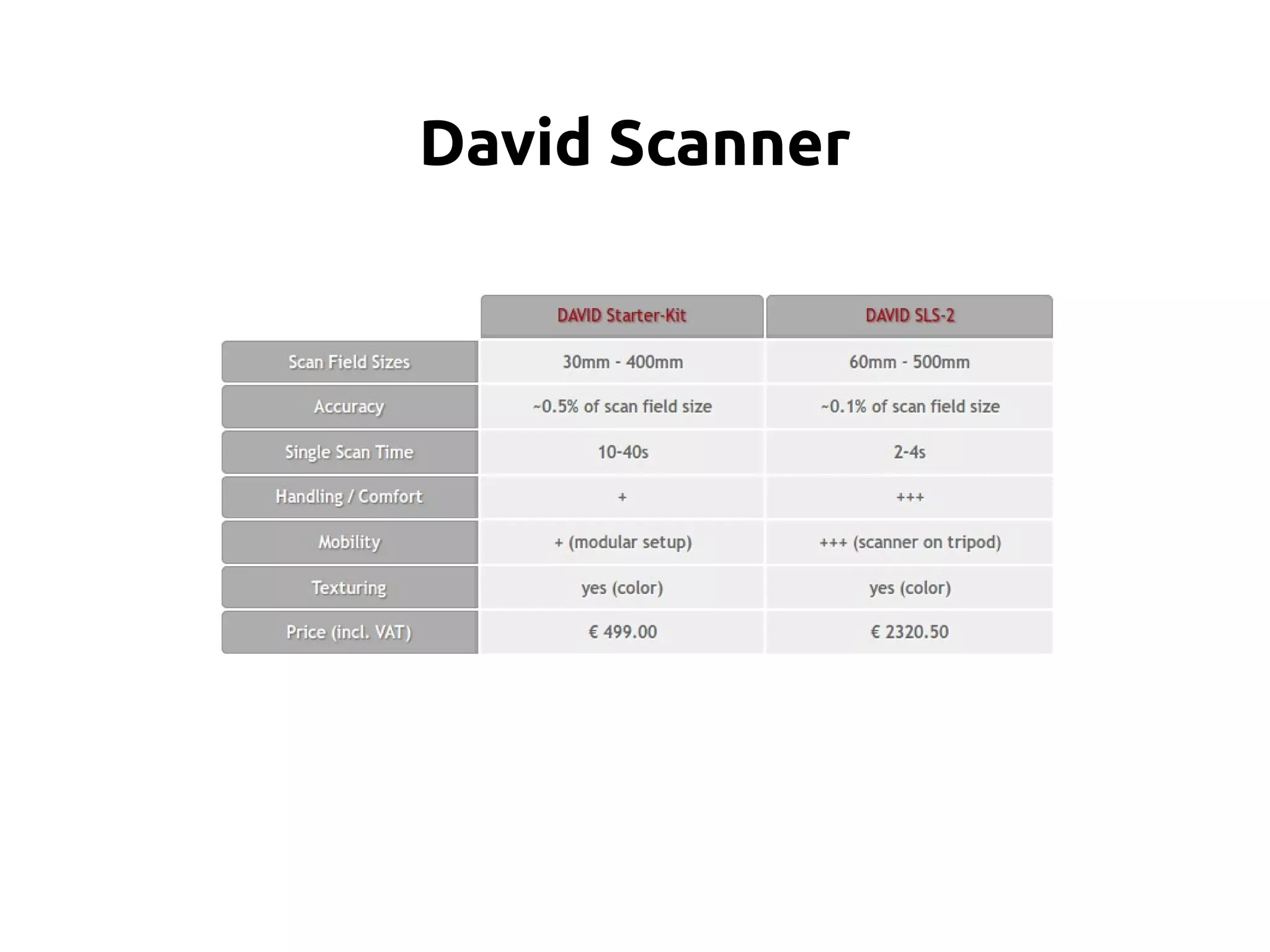





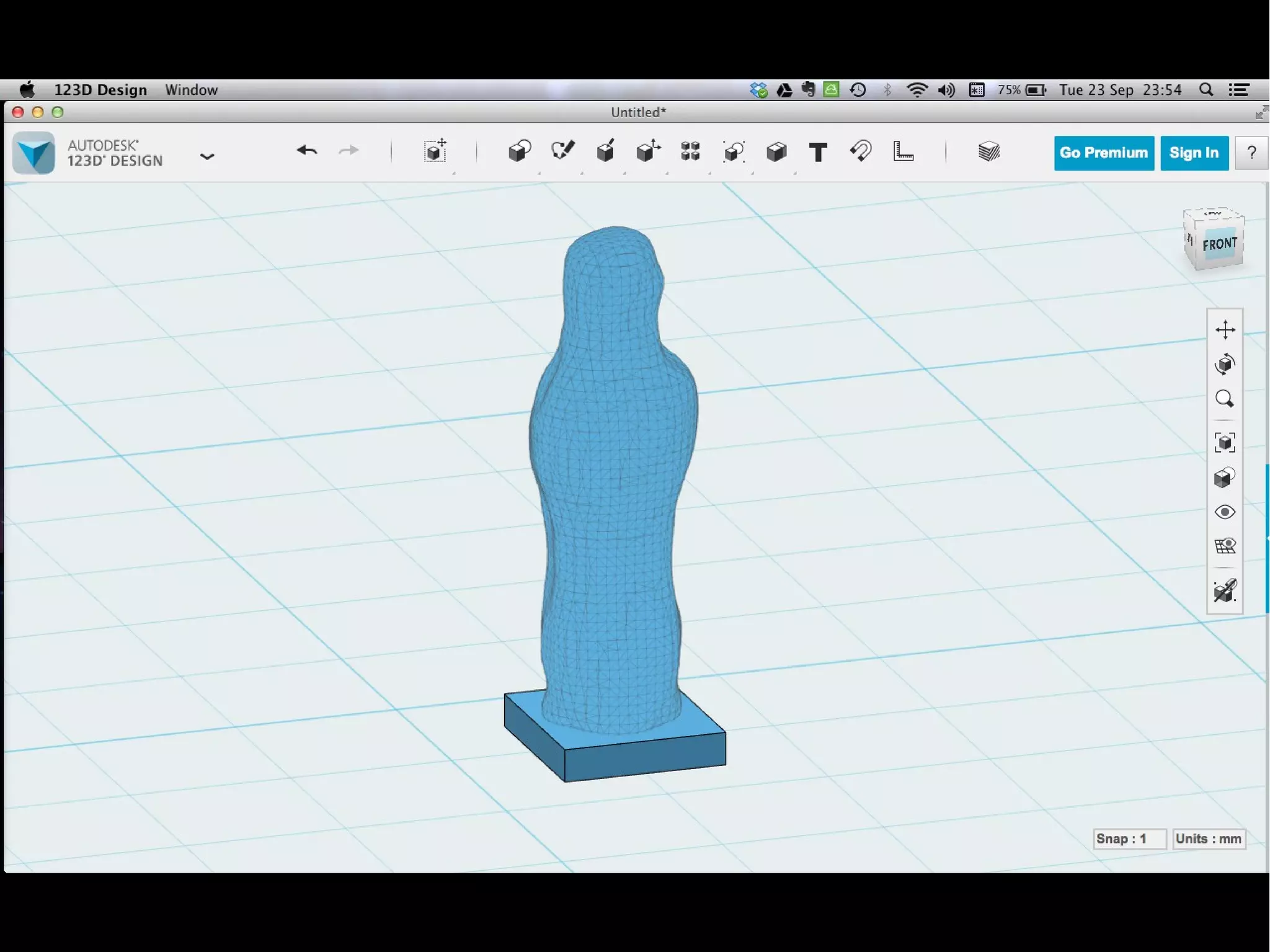

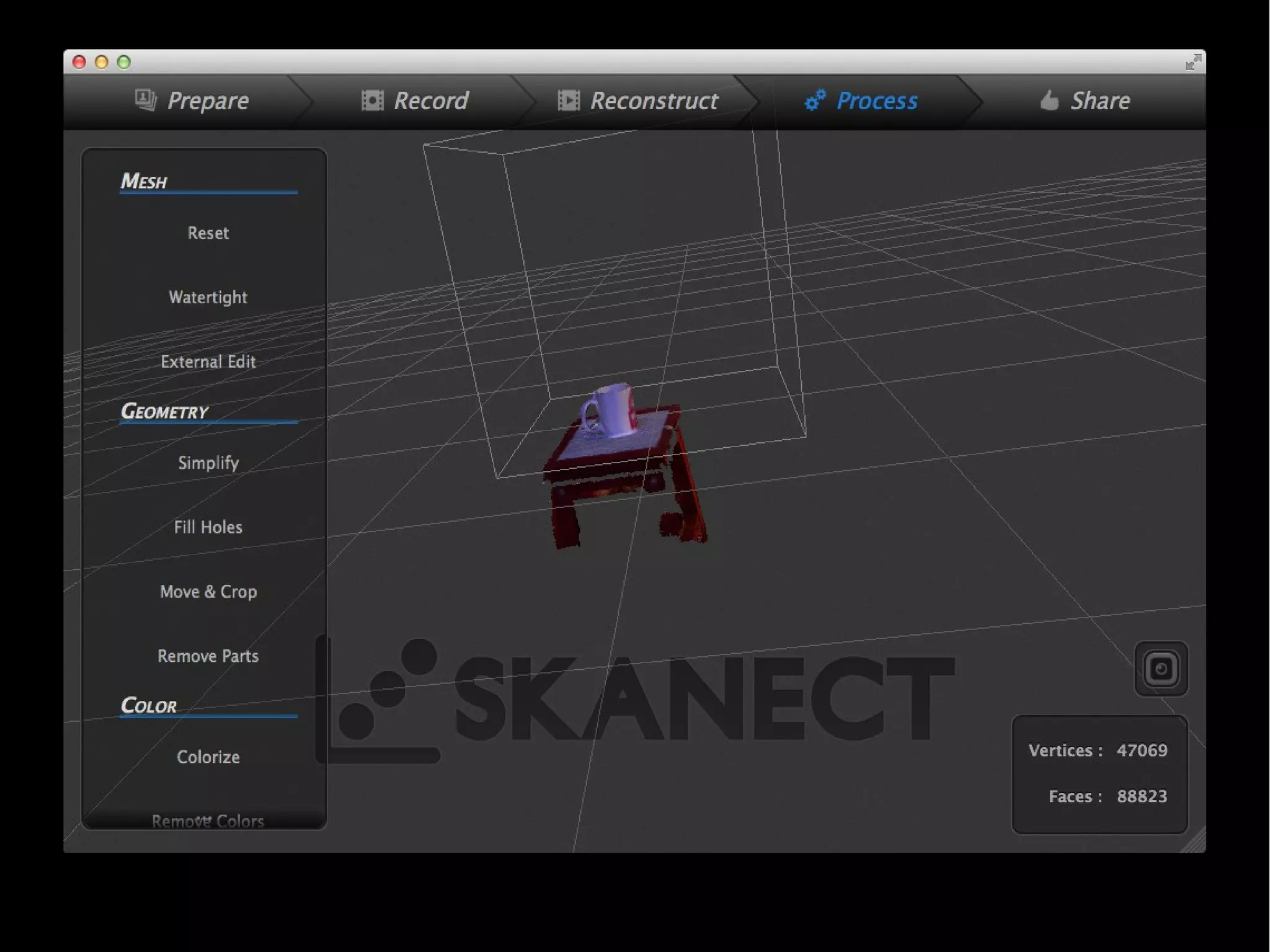

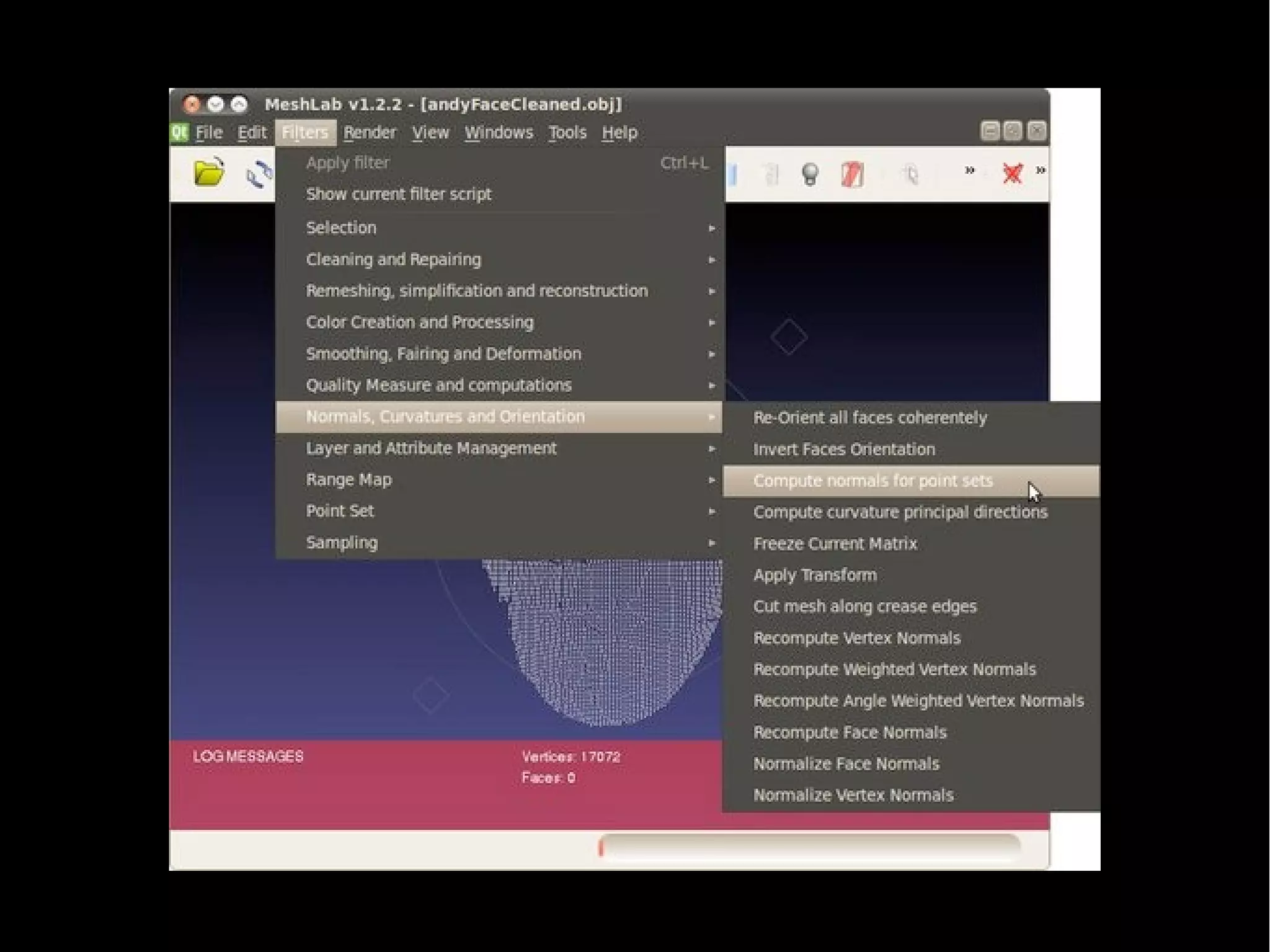
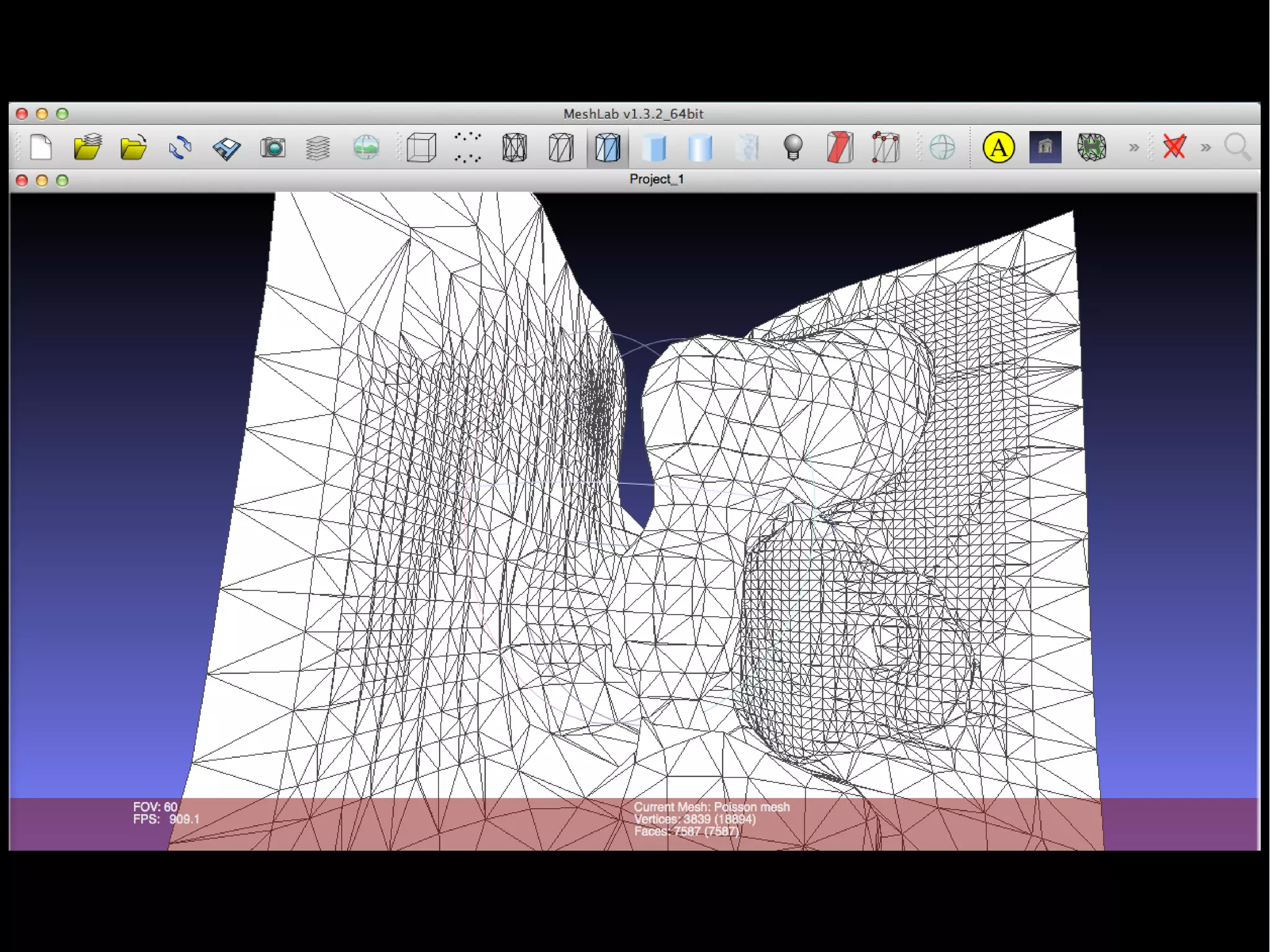
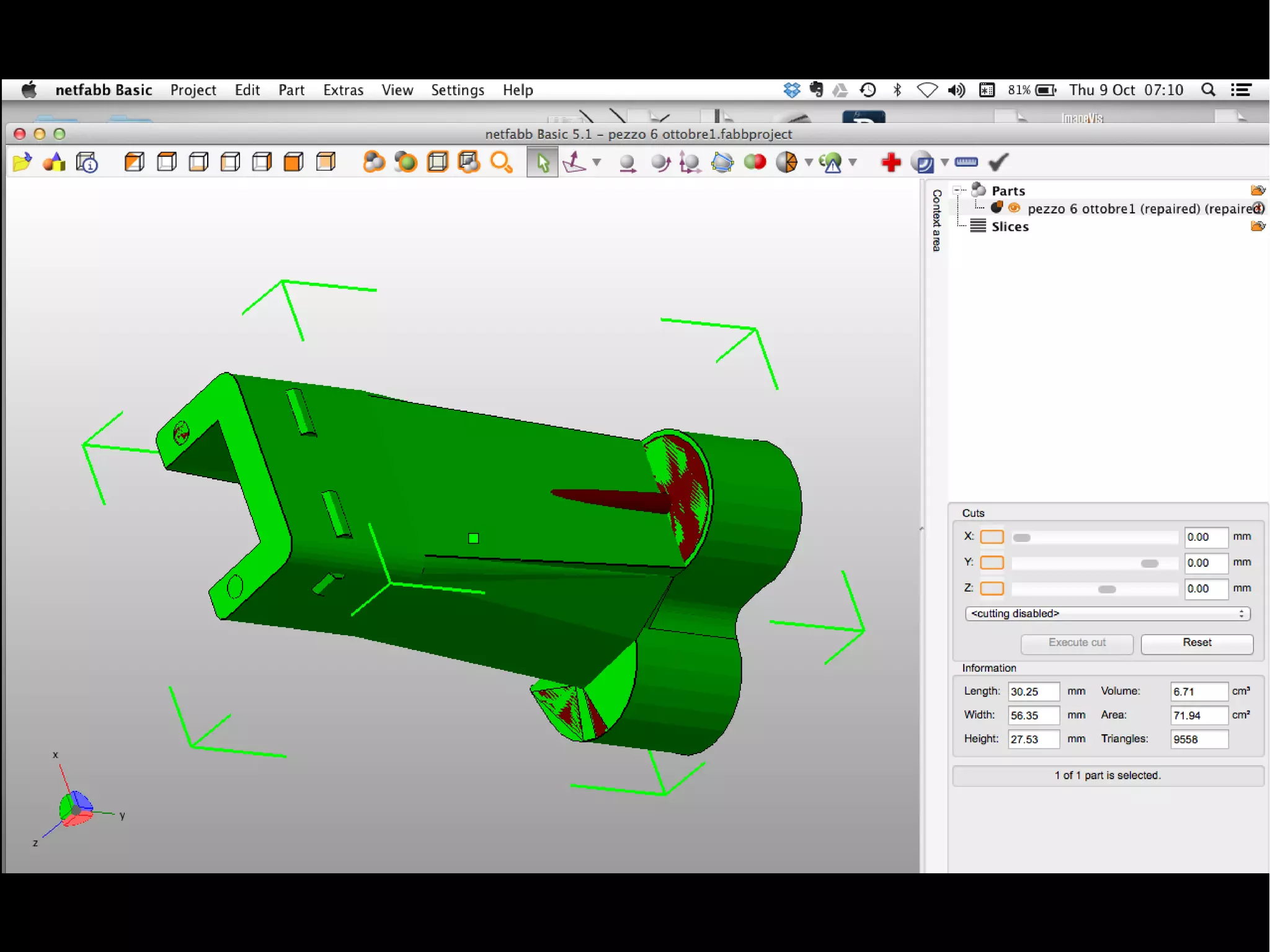
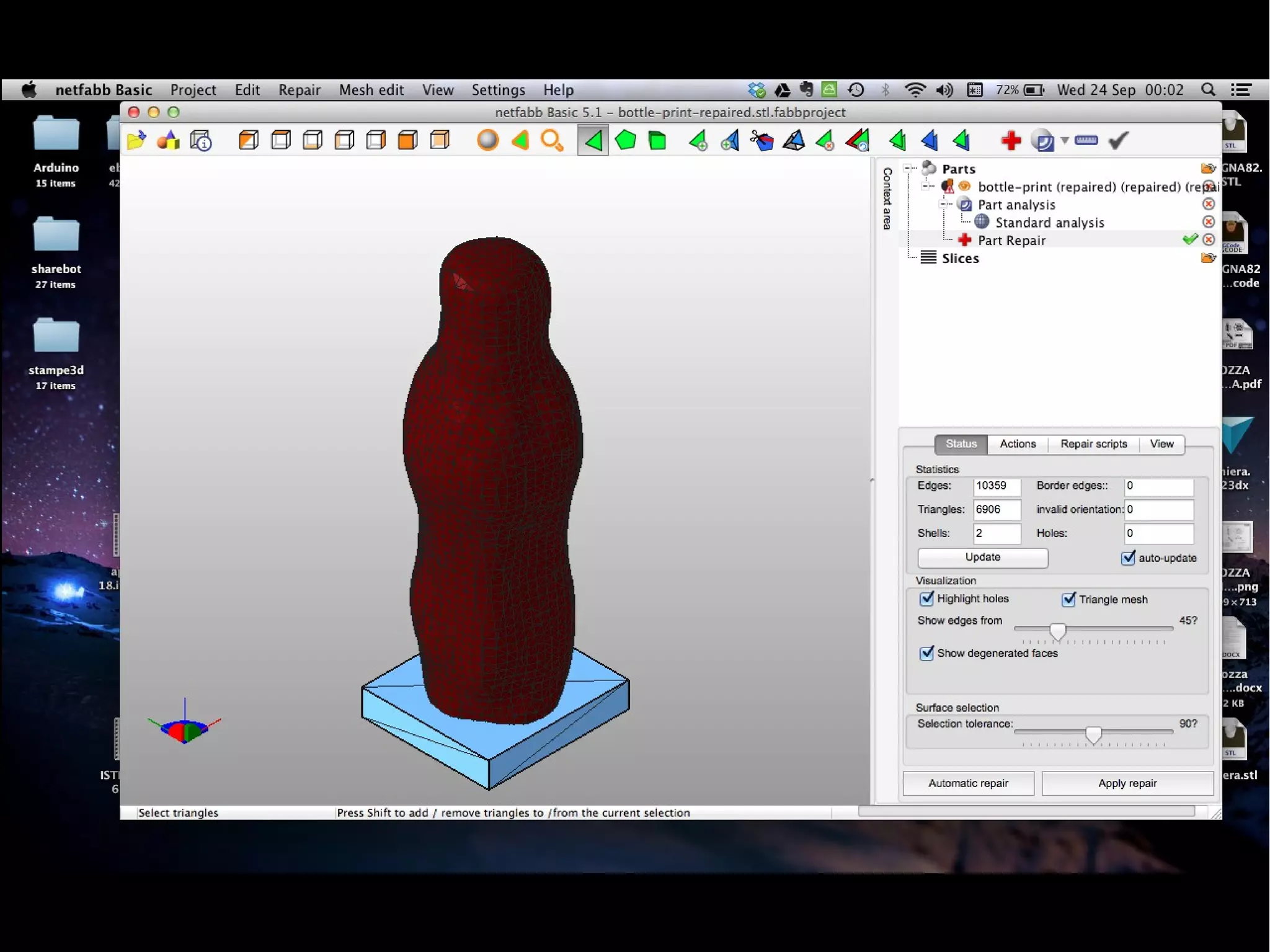

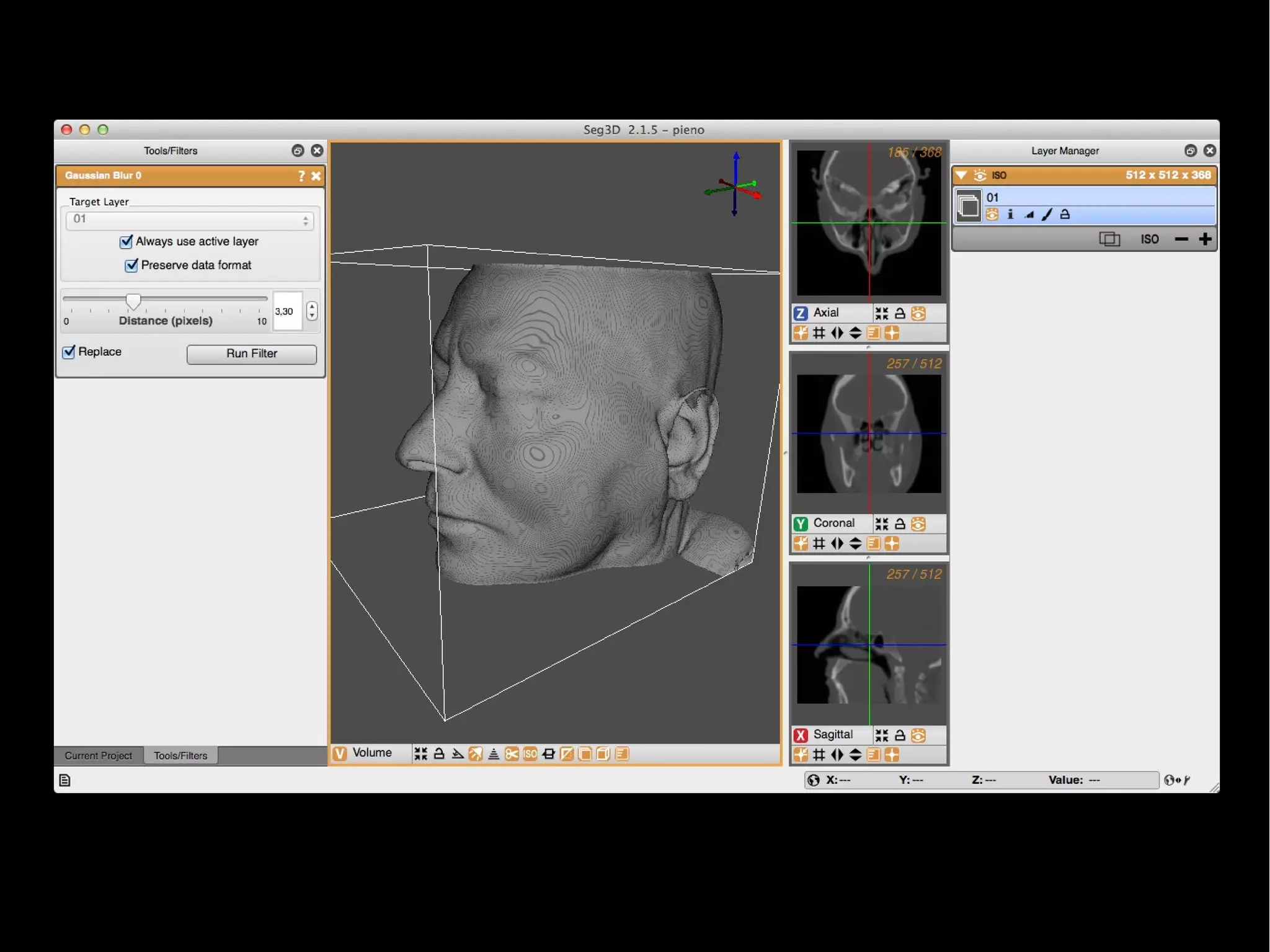
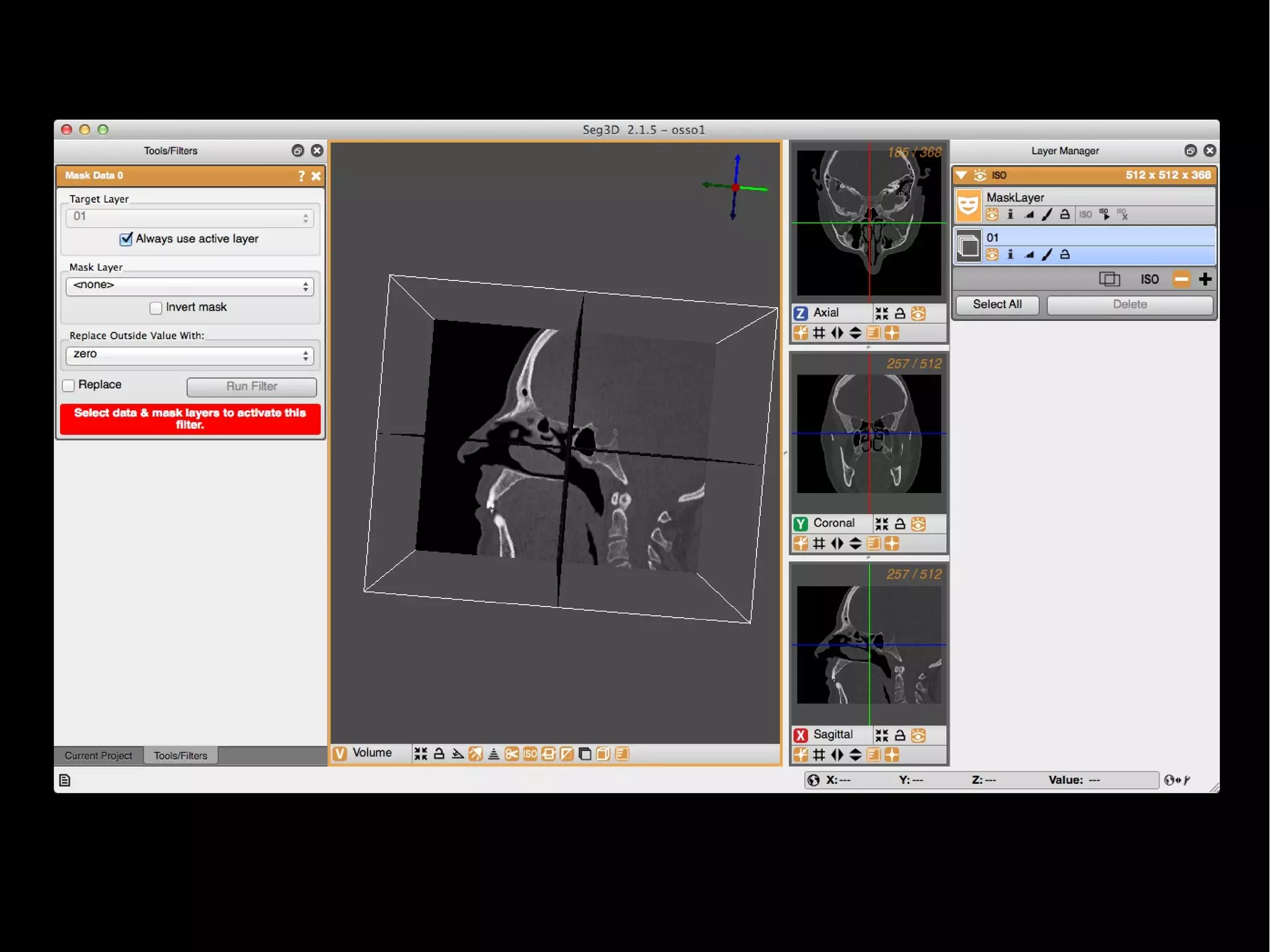
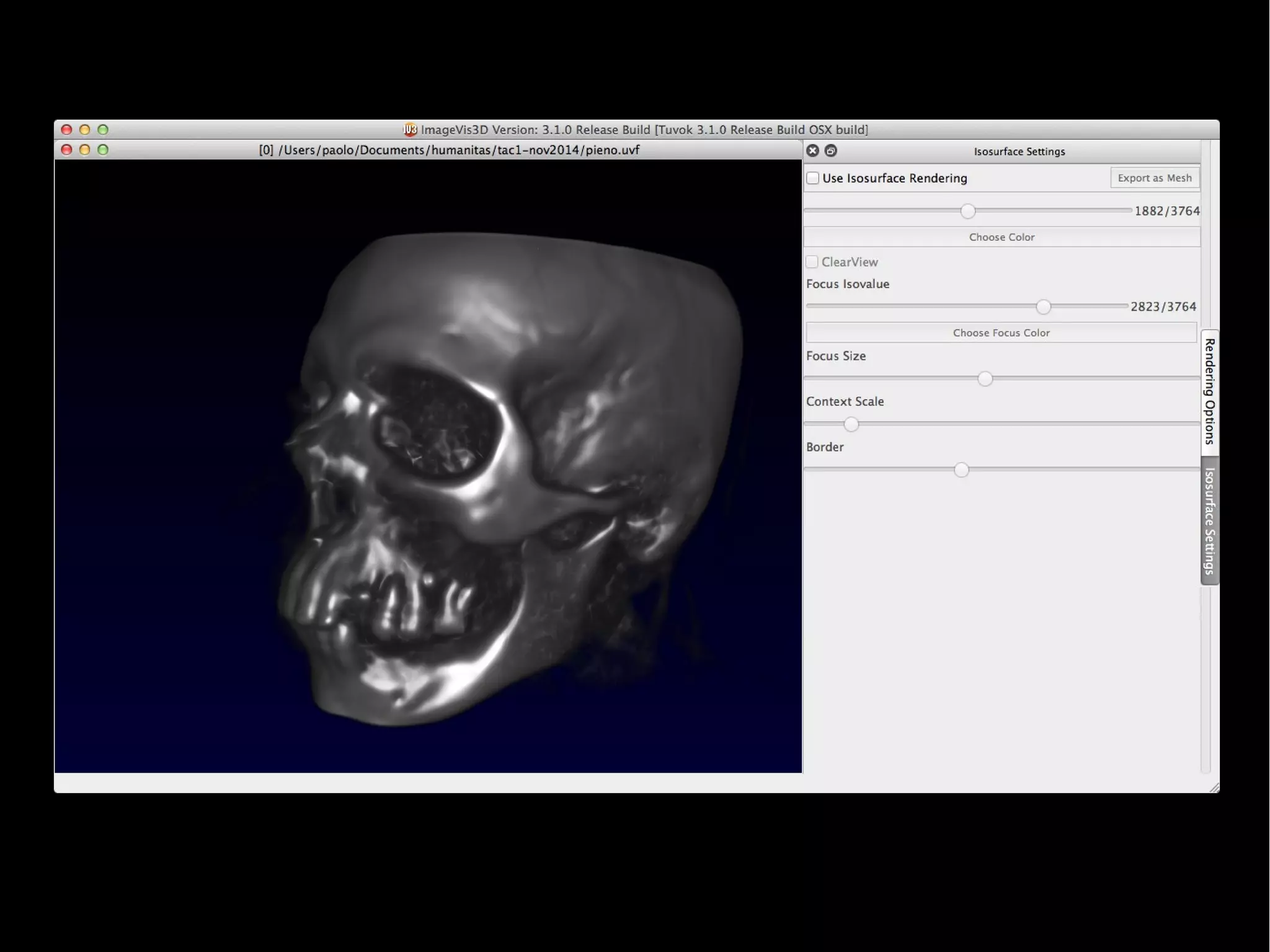
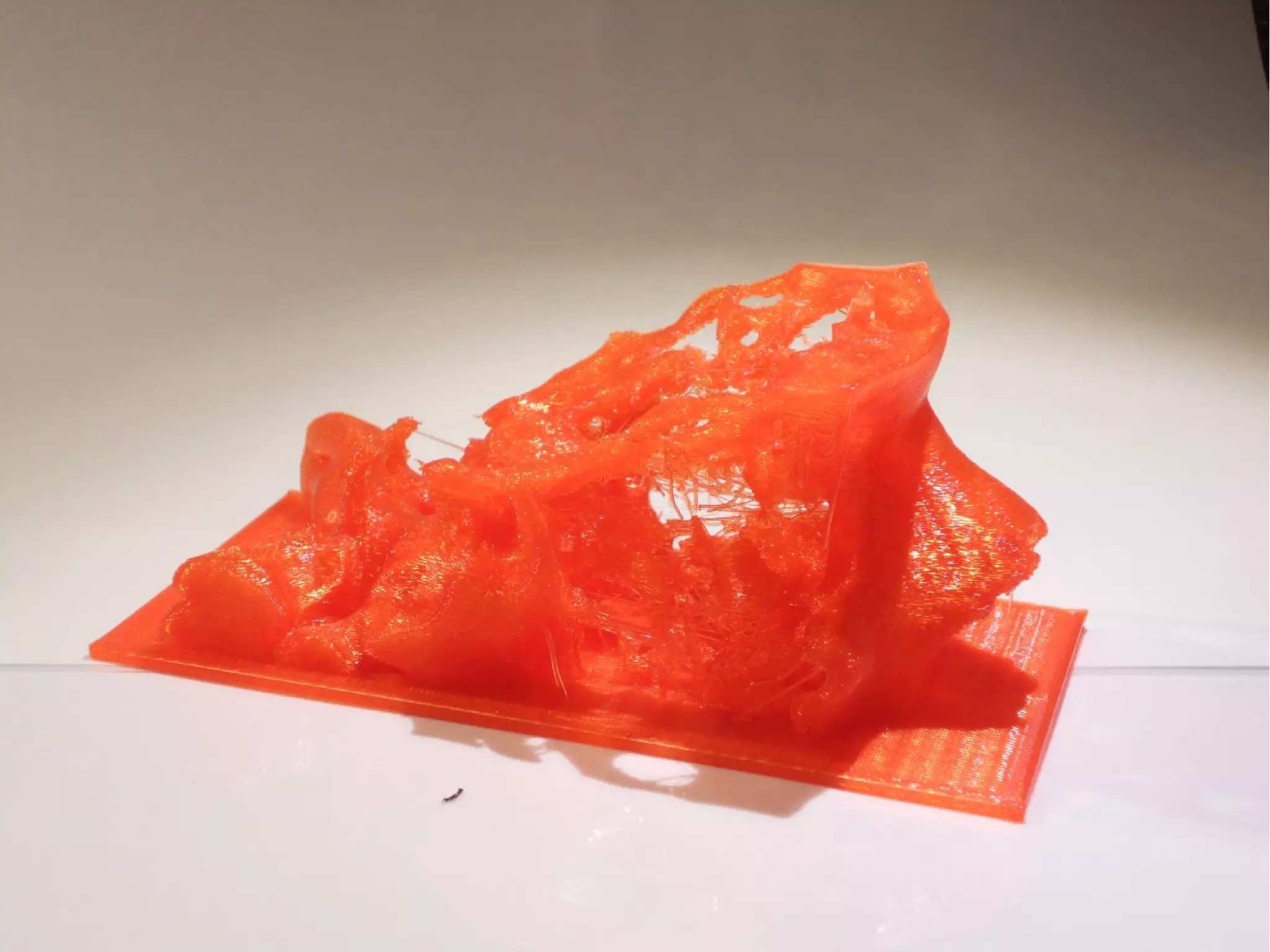



Il documento descrive gli scanner 3D, dispositivi che analizzano oggetti reali per creare modelli tridimensionali digitali. Sottolinea l'evoluzione storica della misurazione e le varie applicazioni degli scanner 3D in medicina, edilizia, design, arte e informatica. Vengono anche esplorate le tecnologie di scansione, la precisione, i formati di file e alcuni esempi di scanner disponibili sul mercato.















































![[#CaseStudy] Quel giorno in cui sono diventato @ilWinnerTaco su Twitter](https://cdn.slidesharecdn.com/ss_thumbnails/ilwinnertaco-twitter-150318043649-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)







































