Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hiroki Nakahara
PDF, PPTX
2,269 views
ROS User Group Meeting #28 マルチ深層学習とROS
ROS User Group MeetingでLTに使った資料です。 マルチ深層学習タスクをROS上で動かすことにチャレンジしています。
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 24
2
/ 24
3
/ 24
4
/ 24
5
/ 24
6
/ 24
7
/ 24
8
/ 24
9
/ 24
10
/ 24
11
/ 24
12
/ 24
13
/ 24
14
/ 24
15
/ 24
16
/ 24
17
/ 24
18
/ 24
19
/ 24
20
/ 24
21
/ 24
22
/ 24
23
/ 24
24
/ 24
More Related Content
PDF
DSF2018講演スライド
by
Hiroki Nakahara
PDF
FPGAX2016 ドキュンなFPGA
by
Hiroki Nakahara
PDF
FPGAX2019
by
Hiroki Nakahara
PDF
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
PDF
2値ディープニューラルネットワークと組込み機器への応用: 開発中のツール紹介
by
Hiroki Nakahara
PDF
(公開版)FPGAエクストリームコンピューティング2017
by
Hiroki Nakahara
PDF
SBRA2018講演資料
by
Hiroki Nakahara
PDF
高位合成でDeep learning
by
Mori Labo.
DSF2018講演スライド
by
Hiroki Nakahara
FPGAX2016 ドキュンなFPGA
by
Hiroki Nakahara
FPGAX2019
by
Hiroki Nakahara
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
2値ディープニューラルネットワークと組込み機器への応用: 開発中のツール紹介
by
Hiroki Nakahara
(公開版)FPGAエクストリームコンピューティング2017
by
Hiroki Nakahara
SBRA2018講演資料
by
Hiroki Nakahara
高位合成でDeep learning
by
Mori Labo.
What's hot
PPTX
深層学習 第4章 大規模深層学習の実現技術
by
孝昌 田中
PDF
Verilog-HDL Tutorial (1)
by
Hiroki Nakahara
PDF
Tensor flow usergroup 2016 (公開版)
by
Hiroki Nakahara
PDF
(公開版)Reconf研2017GUINNESS
by
Hiroki Nakahara
PDF
Nested RNSを用いたディープニューラルネットワークのFPGA実装
by
Hiroki Nakahara
PDF
Binarized Neural Networks
by
Shotaro Sano
PDF
モデルアーキテクチャ観点からのDeep Neural Network高速化
by
Yusuke Uchida
PDF
Convolutional Neural Network @ CV勉強会関東
by
Hokuto Kagaya
PPTX
畳み込みニューラルネットワークの研究動向
by
Yusuke Uchida
PDF
「ゼロから作るDeep learning」の畳み込みニューラルネットワークのハードウェア化
by
marsee101
PDF
ディープラーニング最新動向と技術情報
by
NVIDIA Japan
PDF
電波望遠鏡用の分光器をAltera SDK for OpenCL使ってサクッと作ってみた
by
Hiroki Nakahara
PPTX
Res netと派生研究の紹介
by
masataka nishimori
PDF
深層学習入門
by
Danushka Bollegala
PDF
semantic segmentation サーベイ
by
yohei okawa
PDF
GRU-Prednetを実装してみた(途中経過)
by
Taichi Iki
PPTX
CNNの構造最適化手法について
by
MasanoriSuganuma
PPTX
多層NNの教師なし学習 コンピュータビジョン勉強会@関東 2014/5/26
by
Takashi Abe
PPTX
Pred net使ってみた
by
koji ochiai
PDF
PreadNet
by
Junya Kuwada
深層学習 第4章 大規模深層学習の実現技術
by
孝昌 田中
Verilog-HDL Tutorial (1)
by
Hiroki Nakahara
Tensor flow usergroup 2016 (公開版)
by
Hiroki Nakahara
(公開版)Reconf研2017GUINNESS
by
Hiroki Nakahara
Nested RNSを用いたディープニューラルネットワークのFPGA実装
by
Hiroki Nakahara
Binarized Neural Networks
by
Shotaro Sano
モデルアーキテクチャ観点からのDeep Neural Network高速化
by
Yusuke Uchida
Convolutional Neural Network @ CV勉強会関東
by
Hokuto Kagaya
畳み込みニューラルネットワークの研究動向
by
Yusuke Uchida
「ゼロから作るDeep learning」の畳み込みニューラルネットワークのハードウェア化
by
marsee101
ディープラーニング最新動向と技術情報
by
NVIDIA Japan
電波望遠鏡用の分光器をAltera SDK for OpenCL使ってサクッと作ってみた
by
Hiroki Nakahara
Res netと派生研究の紹介
by
masataka nishimori
深層学習入門
by
Danushka Bollegala
semantic segmentation サーベイ
by
yohei okawa
GRU-Prednetを実装してみた(途中経過)
by
Taichi Iki
CNNの構造最適化手法について
by
MasanoriSuganuma
多層NNの教師なし学習 コンピュータビジョン勉強会@関東 2014/5/26
by
Takashi Abe
Pred net使ってみた
by
koji ochiai
PreadNet
by
Junya Kuwada
Similar to ROS User Group Meeting #28 マルチ深層学習とROS
PDF
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
PPTX
ゼロから深層学習を学ぶ方法 - CMS大阪夏祭り2017
by
Tomo Masuda
PDF
マイクロソフトが考えるAI活用のロードマップ
by
Deep Learning Lab(ディープラーニング・ラボ)
PDF
DAシンポジウム2019招待講演「深層学習モデルの高速なTraining/InferenceのためのHW/SW技術」 金子紘也hare
by
Preferred Networks
PDF
実社会・実環境におけるロボットの機械学習 ver. 2
by
Kuniyuki Takahashi
PPTX
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
PDF
Deep Learningと画像認識 ~歴史・理論・実践~
by
nlab_utokyo
PPTX
「機械学習とは?」から始める Deep learning実践入門
by
Hideto Masuoka
PDF
FPGA, AI, エッジコンピューティング
by
Hideo Terada
PDF
GTC 2016 ディープラーニング最新情報
by
NVIDIA Japan
PDF
【Deep Learning】AlexNetの解説&実装 by PyTorch (colabリンク付き)
by
Daichi Hayashi
PDF
IROS2020 survey
by
robotpaperchallenge
PPTX
2018/06/23 Sony"s deep learning software and the latest information
by
Sony Network Communications Inc.
PDF
20140726.西野研セミナー
by
Hayaru SHOUNO
PDF
[DL輪読会]Making Sense of Vision and Touch: Self-Supervised Learning of Multimod...
by
Deep Learning JP
PDF
TAI_GDEP_Webinar_1a_27Oct2020
by
ssuser5b12d1
PDF
MANABIYA Machine Learning Hands-On
by
陽平 山口
PDF
MIRU2018 tutorial
by
Takayoshi Yamashita
PDF
Deep Learningによる画像認識革命 ー歴史・最新理論から実践応用までー
by
nlab_utokyo
PDF
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
ゼロから深層学習を学ぶ方法 - CMS大阪夏祭り2017
by
Tomo Masuda
マイクロソフトが考えるAI活用のロードマップ
by
Deep Learning Lab(ディープラーニング・ラボ)
DAシンポジウム2019招待講演「深層学習モデルの高速なTraining/InferenceのためのHW/SW技術」 金子紘也hare
by
Preferred Networks
実社会・実環境におけるロボットの機械学習 ver. 2
by
Kuniyuki Takahashi
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
Deep Learningと画像認識 ~歴史・理論・実践~
by
nlab_utokyo
「機械学習とは?」から始める Deep learning実践入門
by
Hideto Masuoka
FPGA, AI, エッジコンピューティング
by
Hideo Terada
GTC 2016 ディープラーニング最新情報
by
NVIDIA Japan
【Deep Learning】AlexNetの解説&実装 by PyTorch (colabリンク付き)
by
Daichi Hayashi
IROS2020 survey
by
robotpaperchallenge
2018/06/23 Sony"s deep learning software and the latest information
by
Sony Network Communications Inc.
20140726.西野研セミナー
by
Hayaru SHOUNO
[DL輪読会]Making Sense of Vision and Touch: Self-Supervised Learning of Multimod...
by
Deep Learning JP
TAI_GDEP_Webinar_1a_27Oct2020
by
ssuser5b12d1
MANABIYA Machine Learning Hands-On
by
陽平 山口
MIRU2018 tutorial
by
Takayoshi Yamashita
Deep Learningによる画像認識革命 ー歴史・最新理論から実践応用までー
by
nlab_utokyo
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
More from Hiroki Nakahara
PDF
FCCM2020: High-Throughput Convolutional Neural Network on an FPGA by Customiz...
by
Hiroki Nakahara
PDF
ISCAS'18: A Deep Neural Network on the Nested RNS (NRNS) on an FPGA: Applied ...
by
Hiroki Nakahara
PDF
ISMVL2018: A Ternary Weight Binary Input Convolutional Neural Network
by
Hiroki Nakahara
PDF
FPGA2018: A Lightweight YOLOv2: A binarized CNN with a parallel support vecto...
by
Hiroki Nakahara
PDF
FPT17: An object detector based on multiscale sliding window search using a f...
by
Hiroki Nakahara
PDF
A Random Forest using a Multi-valued Decision Diagram on an FPGa
by
Hiroki Nakahara
PDF
Altera sdk for open cl アンケート集計結果(公開版)
by
Hiroki Nakahara
PDF
Naist2015 dec ver1
by
Hiroki Nakahara
PDF
FPL15 talk: Deep Convolutional Neural Network on FPGA
by
Hiroki Nakahara
PDF
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (15) software
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (15) hardware
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (14)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (13)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (12)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (11)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (9)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (8)
by
Hiroki Nakahara
PDF
Verilog-HDL Tutorial (7)
by
Hiroki Nakahara
FCCM2020: High-Throughput Convolutional Neural Network on an FPGA by Customiz...
by
Hiroki Nakahara
ISCAS'18: A Deep Neural Network on the Nested RNS (NRNS) on an FPGA: Applied ...
by
Hiroki Nakahara
ISMVL2018: A Ternary Weight Binary Input Convolutional Neural Network
by
Hiroki Nakahara
FPGA2018: A Lightweight YOLOv2: A binarized CNN with a parallel support vecto...
by
Hiroki Nakahara
FPT17: An object detector based on multiscale sliding window search using a f...
by
Hiroki Nakahara
A Random Forest using a Multi-valued Decision Diagram on an FPGa
by
Hiroki Nakahara
Altera sdk for open cl アンケート集計結果(公開版)
by
Hiroki Nakahara
Naist2015 dec ver1
by
Hiroki Nakahara
FPL15 talk: Deep Convolutional Neural Network on FPGA
by
Hiroki Nakahara
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
Verilog-HDL Tutorial (15) software
by
Hiroki Nakahara
Verilog-HDL Tutorial (15) hardware
by
Hiroki Nakahara
Verilog-HDL Tutorial (14)
by
Hiroki Nakahara
Verilog-HDL Tutorial (13)
by
Hiroki Nakahara
Verilog-HDL Tutorial (12)
by
Hiroki Nakahara
Verilog-HDL Tutorial (11)
by
Hiroki Nakahara
Verilog-HDL Tutorial (9)
by
Hiroki Nakahara
Verilog-HDL Tutorial (8)
by
Hiroki Nakahara
Verilog-HDL Tutorial (7)
by
Hiroki Nakahara
Recently uploaded
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
ROS User Group Meeting #28 マルチ深層学習とROS
1.
中原 啓貴 東京⼯業⼤学 マルチ深層学習タスクとROSによる ⾼機能なロボットを⽬指して
2.
⾃⼰紹介 • なかはら ひろき
(Hiroki Nakahara) https://github.com/HirokiNakahara/ • 速いコンピュータを作りたい • 多値論理: Ternary, RNS • 計算機アーキテクチャ: FPGA, ASIC • 深層学習 • ツールとか: GUINNESS (GUI based neural network synthesizer) 2
3.
GUINNESS ツールフロー .model Binarized CNN Weight Chainer to C++ Model to Text Binarized Weight .txt PL code .cpp PS code .cpp gcc HLS .elf .bit .pkl Label Data .txt CNN Spec. .py Image Data PS PL Exe. data Bit stream BRAM FPGA GUIによる 操作 ユーザの 学習⽤画像 GPU上で学習 FPGAベンダの システム設計ツールで ビットストリーム⽣成 https://github.com/HirokiNakahara/GUINNESS
4.
Deep Learning is Everywhere 4
5.
Applications • Robotics, autonomous driving, security, drones… 5
6.
Object Detection 6 Person J. Redmon and A. Farhadi, "YOLOv3: An Incremental Improvement," arXiv, 2018 Person Boat
7.
Semantic Segmentation 7E. Shelhamer, J. Long and T. Darrell, "Fully Convolutional Networks for Semantic Segmentation," IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.39, No.4, 2017, pp. 640 ‐ 651.
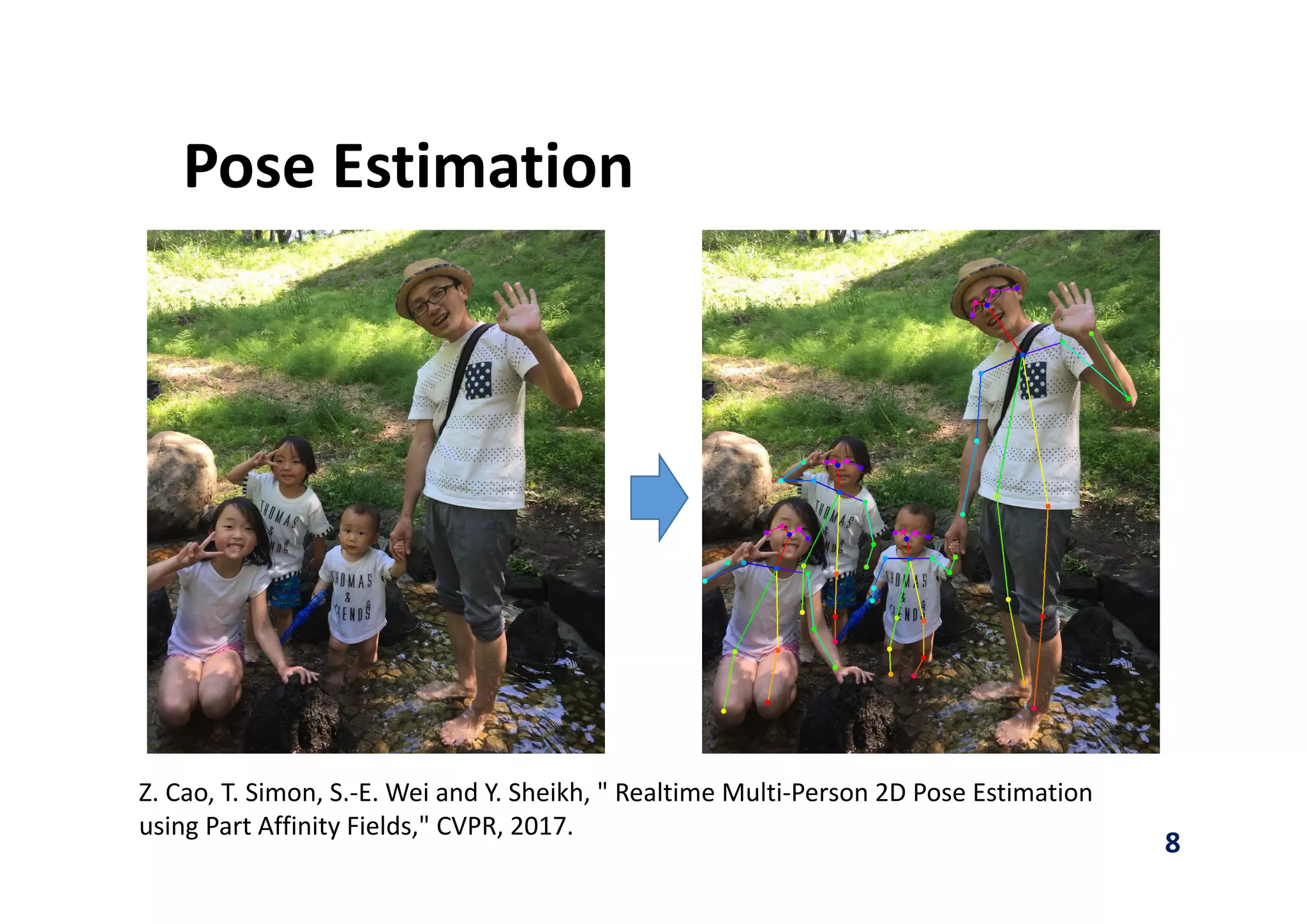
8.
Pose Estimation 8 Z. Cao, T. Simon, S.‐E. Wei and Y. Sheikh, " Realtime Multi‐Person 2D Pose Estimation using Part Affinity Fields," CVPR, 2017.
9.
Depth Map Prediction 9 D. Eigen, C. Puhrsch and R. Fergus, "Depth Map Prediction from a Single Image using a Multi‐Scale Deep Network," arXiv:1406.2283 , 2014.
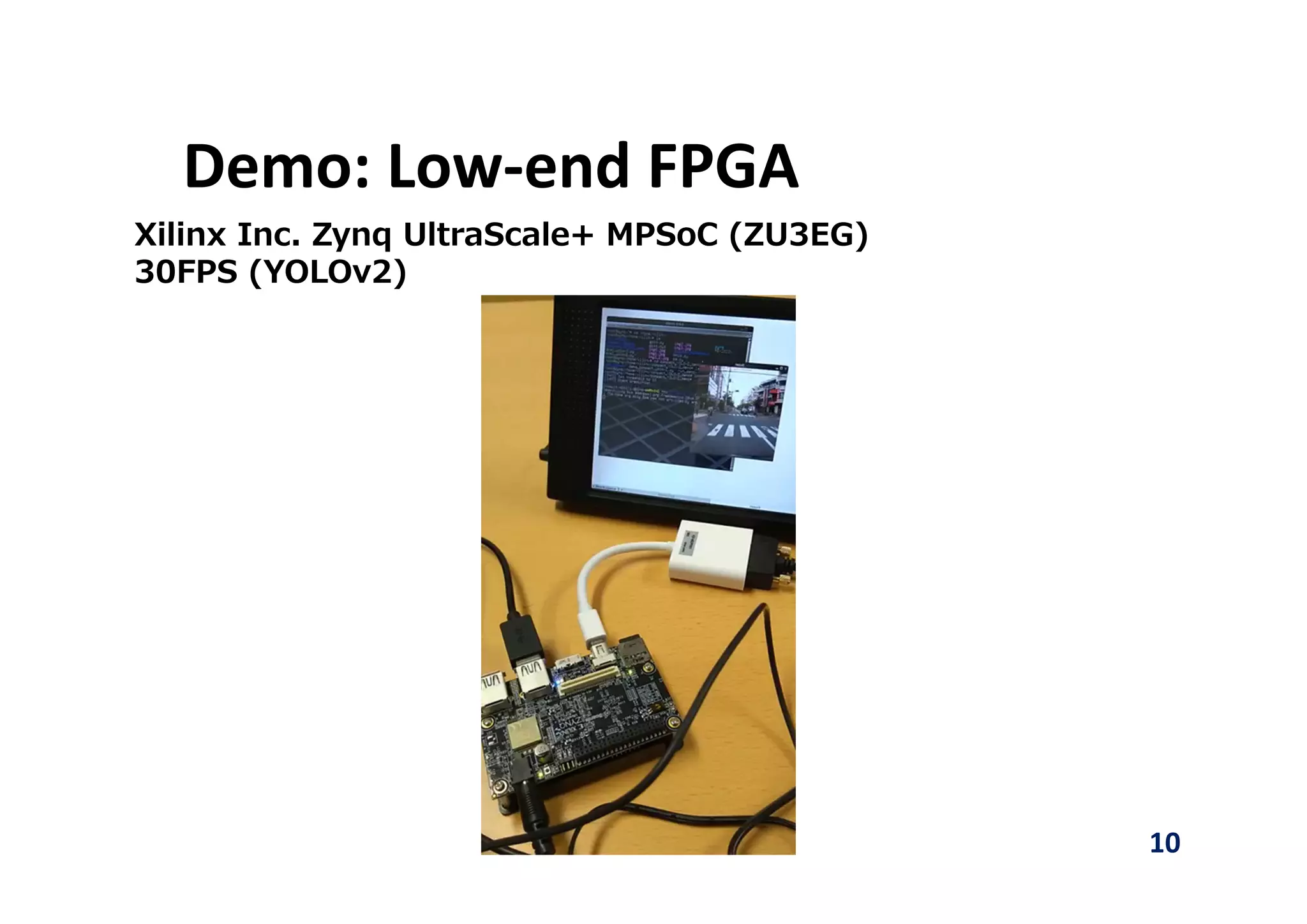
10.
Demo: Low‐end FPGA 10 Xilinx Inc. Zynq
UltraScale+ MPSoC (ZU3EG) 30FPS (YOLOv2)
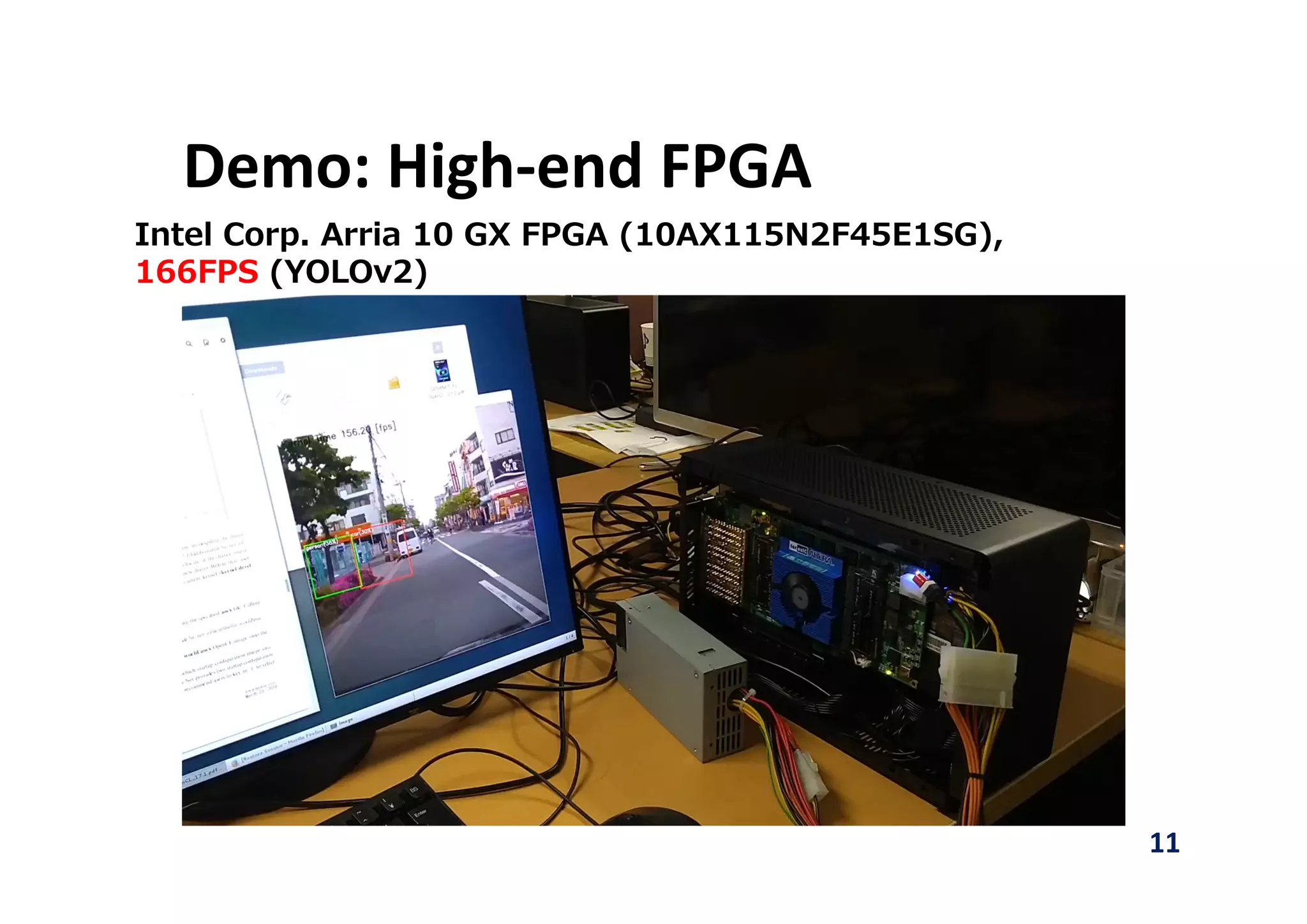
11.
Demo: High‐end FPGA 11 Intel Corp. Arria
10 GX FPGA (10AX115N2F45E1SG), 166FPS (YOLOv2)
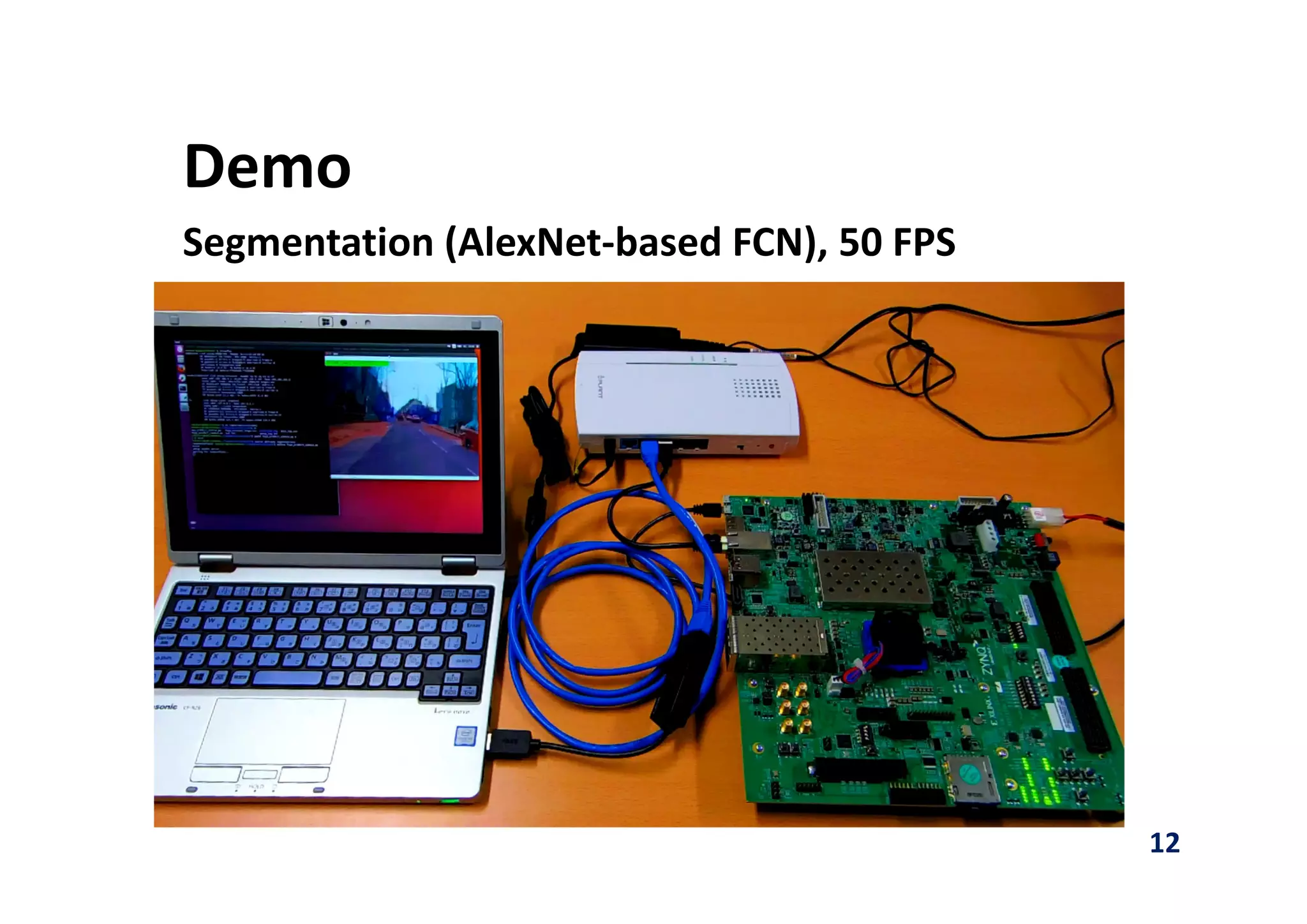
12.
Demo Segmentation (AlexNet‐based FCN), 50 FPS 12
13.
まじめな話 • 超⾼齢者社会に向けて • Home Support Robot (HSR) 13
14.
本⾳ • ロボットを作りたい︕ 14
15.
Convolutional Neural Network (CNN) • Convolutional + Fully connected + Pooling • State‐of‐the‐art
performance in an image recognition task • Widely applicable 15Source: https://www.mathworks.com/discovery/convolutional‐neural‐network.html
16.
Deep Learning Inference Device 16 Flexibility Power Performance Efficiency CPU (Raspberry Pi3) GPU (Jetson TX2) FPGA (UltraZed) ASIC (Movidius) • Flexibility: R&D costs for keeping on evolving algorithms • Power performance efficiency •
FPGA has flexibility&better performance
17.
Field Programmable Gate Array (FPGA) • Millions of Look‐Up Tables (LUTs) • Thousands of on‐chip memories and DSP blocks •
Programmable channels • Dedicated IP macros (PCIe,DDR,MPU) 17Source: Intel Corp. Arria10 FPGA Device Family Overview
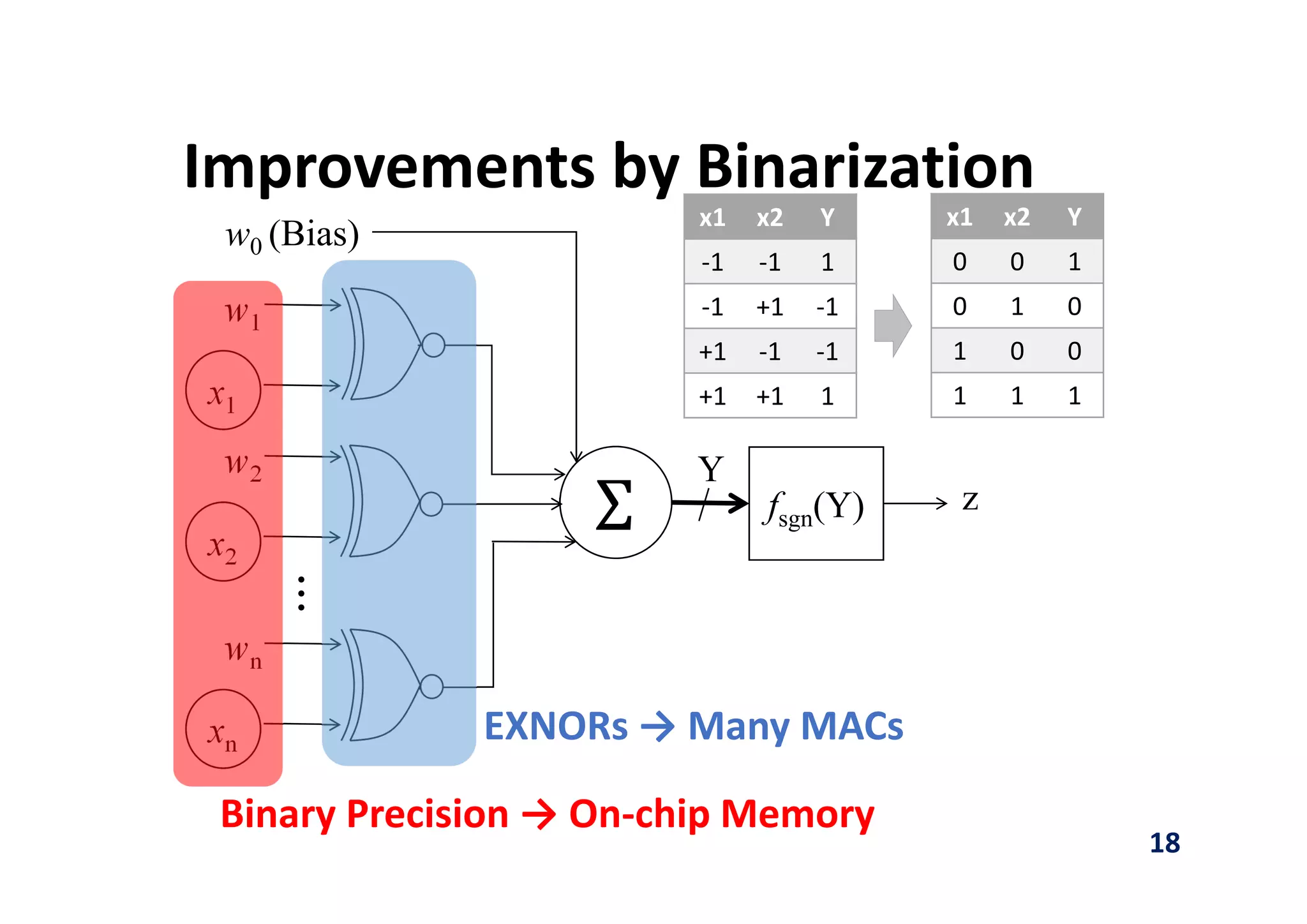
18.
Improvements by Binarization 18 x1 w0 (Bias) fsgn(Y) Y z w1 x2 w2 xn wn ... x1 x2
Y ‐1 ‐1 1 ‐1 +1 ‐1 +1 ‐1 ‐1 +1 +1 1 x1 x2 Y 0 0 1 0 1 0 1 0 0 1 1 1 EXNORs → Many MACs Binary Precision → On‐chip Memory
19.
Near Memory Realization by Binarization E. Joel et al., “Tutorial on Hardware Architectures for Deep Neural Networks,” MICRO‐49, 2016. 19 On-chip Memory J. Dean, “Numbers everyone should know” Source: https://gist.github.com/2841832 • High bandwidth (Left) •
Less power consumption (Right)
20.
PYNQ + ⾼位合成 + ROS http://www.pynq.io/ • C++で記述, HLSでIPコア(ROSノード)化 •
Ubuntu 上のPythonでSW設計 →ROS Kinetic を利⽤ 20 ‐‐‐‐‐‐‐ ‐‐‐‐‐‐‐ ‐‐‐‐‐‐‐ ‐‐‐‐‐‐‐ ‐‐‐‐‐‐‐ ‐‐‐‐‐‐‐ http://www.pynq.io/
21.
プロトタイプ 21 ホストPC (Ubuntu16.04+ROS Kinetic) FPGA (ZCU104 Board) ホストPCのカメラ アクチュエータ Roomba 約8万円 ミドルクラス FPGA搭載 (Zynq Ultra Scale+) Roomba以外の 電源(omnicharge) ホストPCとFPGAはEthernetで接続
22.
22 ⼈をストーカー 追跡する ロボット → 警備員 ロボット
23.
Multiple DL Tasks • Taskonomy [Zamir, CVPR2018 (best paper)] •
http://taskonomy.stanford.edu/ • 26種類のタスクを同時に学習・実⾏ • ロボットでやりたい︕ 23
24.
まとめ • FPGAを使うと⾼性能なDLをROSで扱える(といいな) • オンチップメモリ利⽤ •
Pynqフレームワーク • 設計難易度が⾼いのがネック →フレームワークを開発中 • マルチ深層学習タスク • 複数画像処理+⾳声処理も可能 24
Download

















![Multiple DL Tasks
• Taskonomy [Zamir, CVPR2018 (best paper)]
• http://taskonomy.stanford.edu/
• 26種類のタスクを同時に学習・実⾏
• ロボットでやりたい︕
23](https://image.slidesharecdn.com/rosugmeeting2019mar13-190313105150/75/ROS-User-Group-Meeting-28-ROS-23-2048.jpg)












































![[DL輪読会]Making Sense of Vision and Touch: Self-Supervised Learning of Multimod...](https://cdn.slidesharecdn.com/ss_thumbnails/20190802dl-190808102241-thumbnail.jpg?width=640&height=640&fit=bounds)