Downloaded 149 times




![Floyd-Warshall Algorithm
The Floyd–Warshall algorithm is an example of dynamic
programming, and was published in its currently recognized form by
Robert Floyed in 1962.
It is also known as all pair shortest path problem.
Floyd–Warshall algorithm is an algorithm for finding shortest paths
in a weighted graph with positive or negative edge weights (but with
no negative cycles).
If requires n iteration after iteration k ,A(Cost Matrix), gives the
length of the shortest path that only uses nodes {1,2,..k} as
intermediate nodes at iteration k the algorithm must check for each
pair of nodes (i , j) whether or not their exist a path from i to j passing
through vertex k that is better than the present optional path
through nodes in {1,2,..k-1}, Hence
A k [i , j]=min{ Ak-1[i , j] ,Ak-1[i , k] +Ak-1[k , j] }
Where k>=1](https://image.slidesharecdn.com/reviewandevaluationsofshortestpathalgorithms-160618072154/75/Review-and-evaluations-of-shortest-path-algorithms-9-2048.jpg)
![Algorithm …
//cost [1:n,1:n] is the cost adjacency matrix of the graph with n
vertices .
//A[i , j] is the cost of the shortest path from vertex i to 1.
Cost [i , j ]=0 to n do
for i1 to n do
for j 1 to n do
A[i , j] cost [i , j] //copy cost into A
end for
end for
for k 1 to n do
for i1 to n do
for j 1 to n do
A[i ,j] min{A[ i , j ],A[ i , k ]+A[ k ,j ] }
end for
end for
end for
return (A)
end algorithm
n*n
n*n*n
Total time is
𝜽(n3)](https://image.slidesharecdn.com/reviewandevaluationsofshortestpathalgorithms-160618072154/75/Review-and-evaluations-of-shortest-path-algorithms-10-2048.jpg)










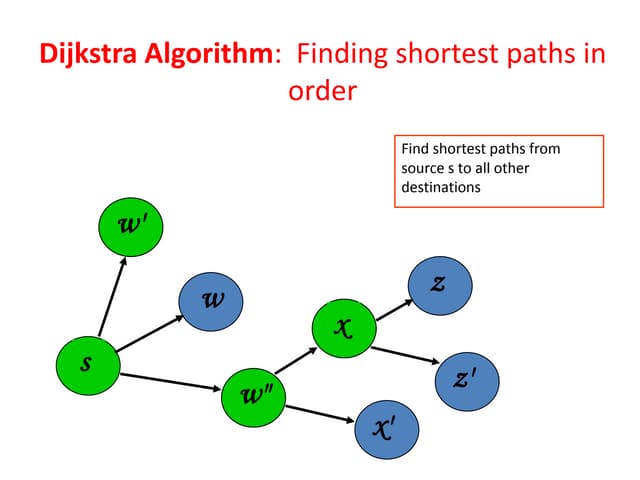
The document discusses several algorithms for finding the shortest path in a graph: Dijkstra's algorithm, Floyd-Warshall algorithm, Bellman-Ford algorithm, and genetic algorithms. It provides details on how Dijkstra's and Floyd-Warshall algorithms work, including pseudocode. Examples are given for both algorithms. Applications of the different algorithms are also discussed.