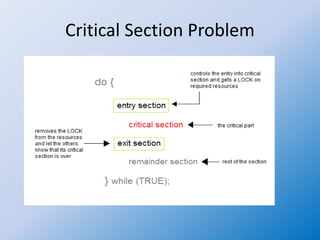
The document discusses process synchronization, focusing on critical sections where processes access shared resources and the requirements for mutual exclusion, progress, and bounded waiting. It introduces semaphores, a synchronization tool proposed by Dijkstra, explaining their operations (wait and signal) and the types of semaphores, namely binary and counting semaphores. Additionally, the document highlights limitations of semaphores, such as priority inversion and potential deadlocks, and touches on the mathematical foundations of synchronization in databases.