Downloaded 18 times

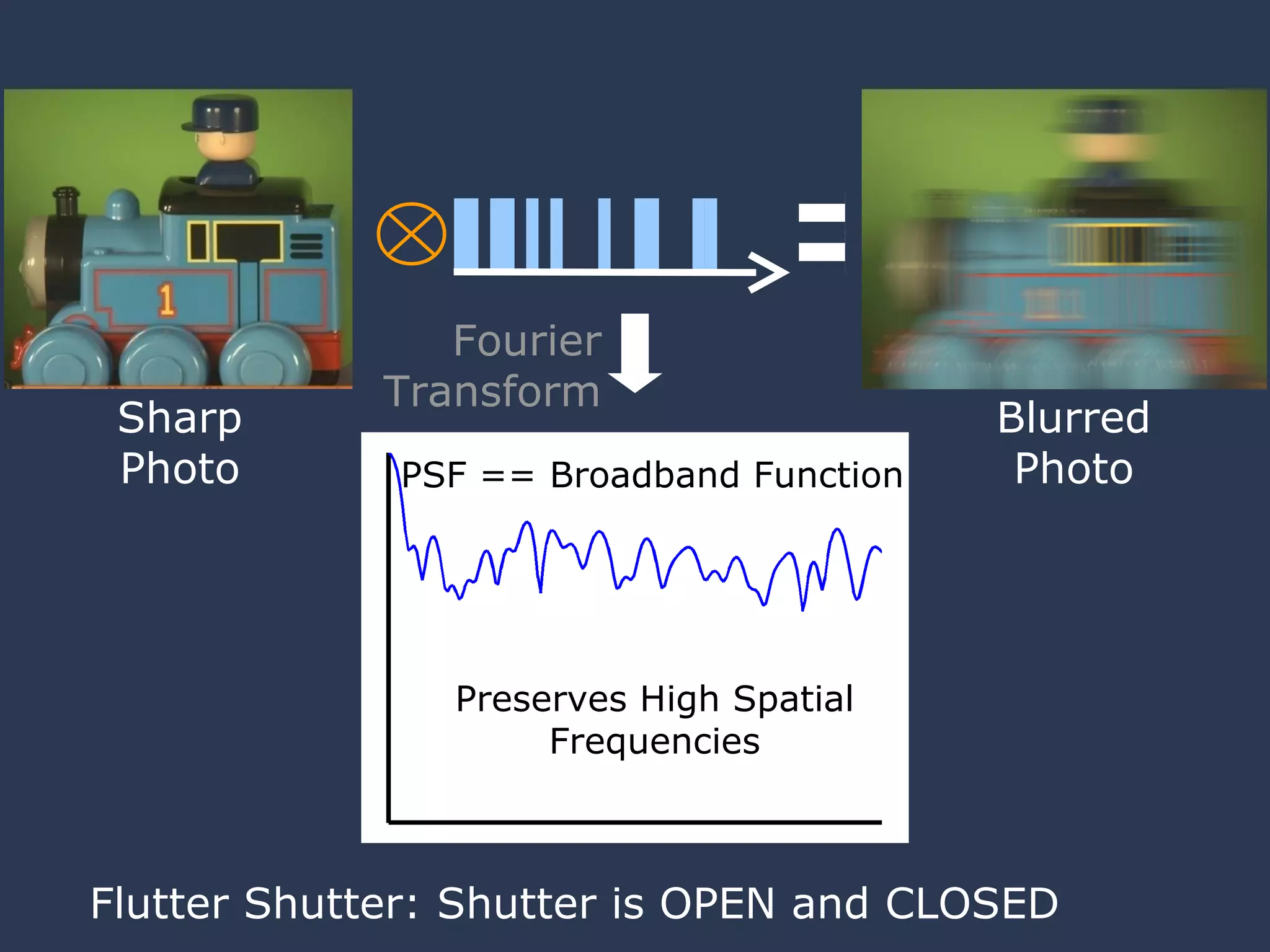
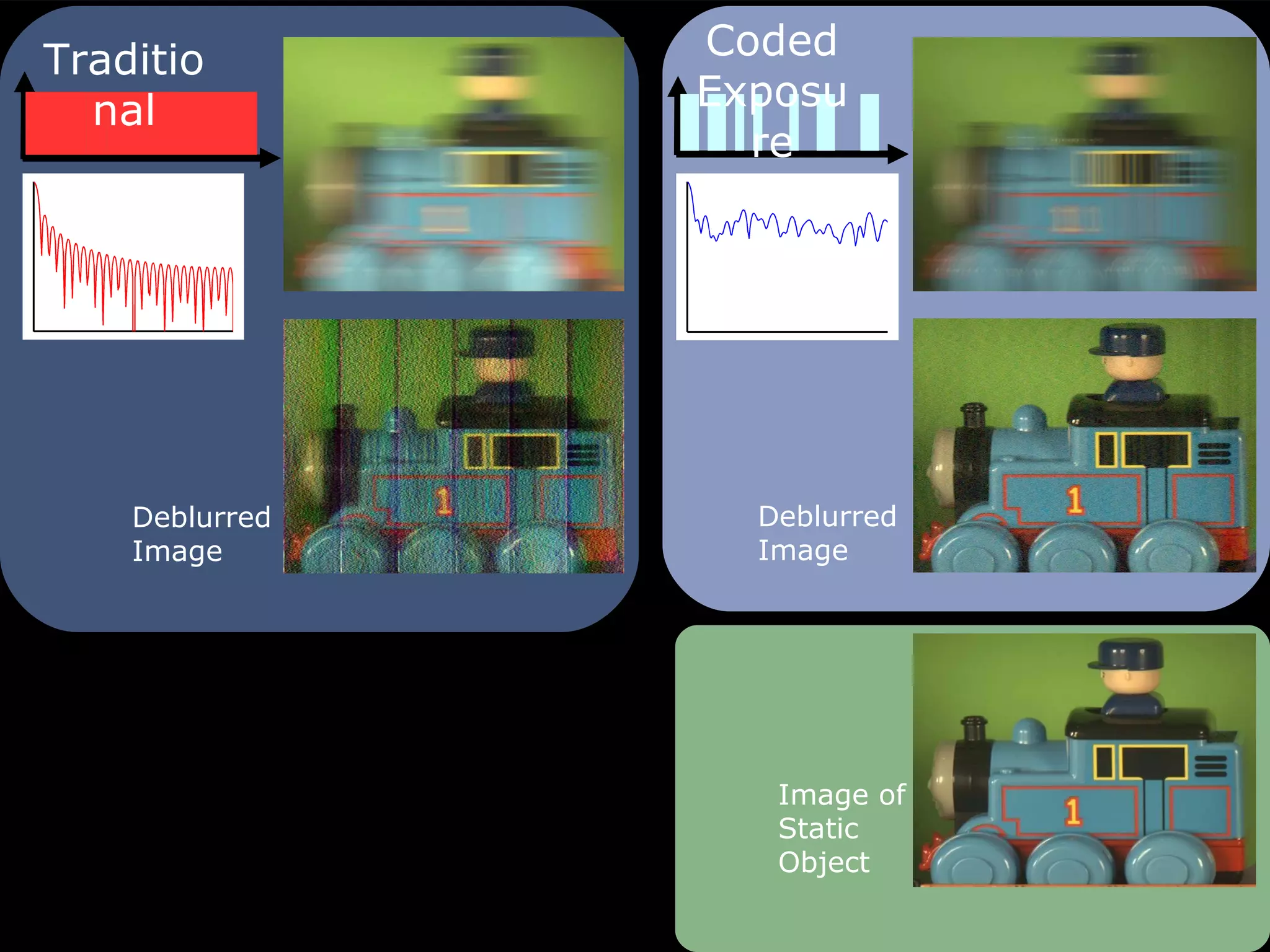
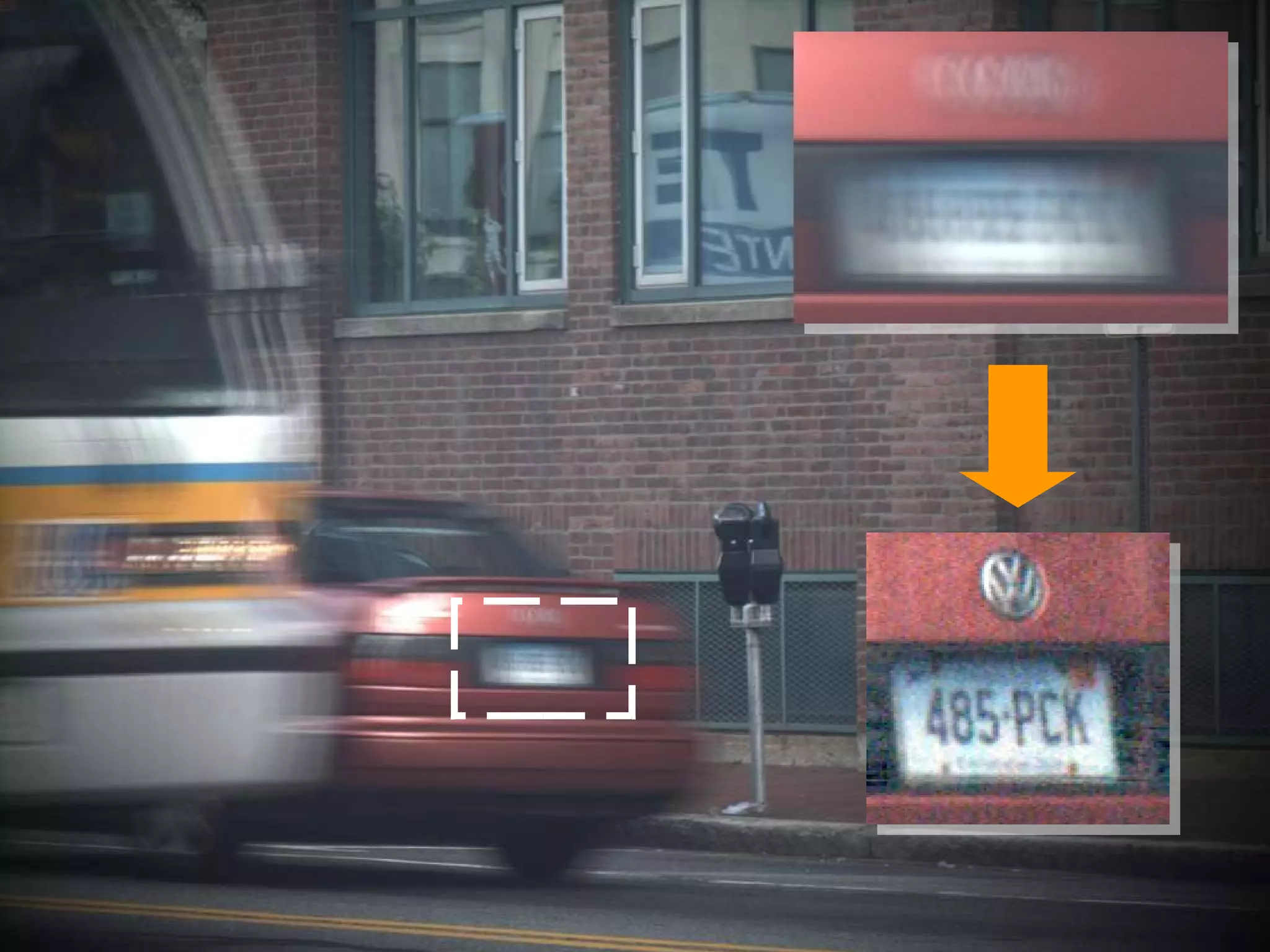
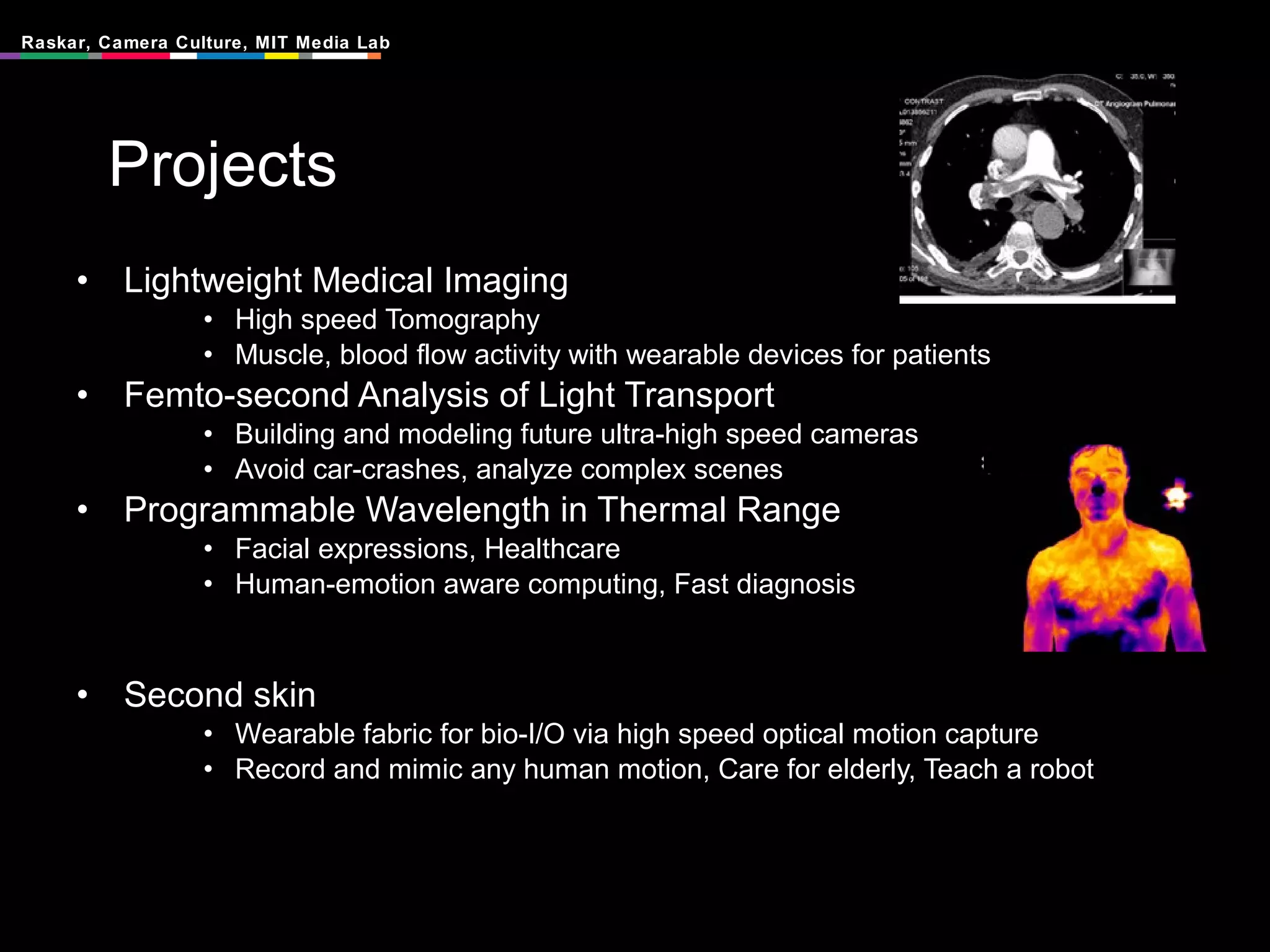
![Flutter Shutter Camera Raskar, Agrawal, Tumblin [Siggraph2006] LCD opacity switched in coded sequence](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-12-2048.jpg)
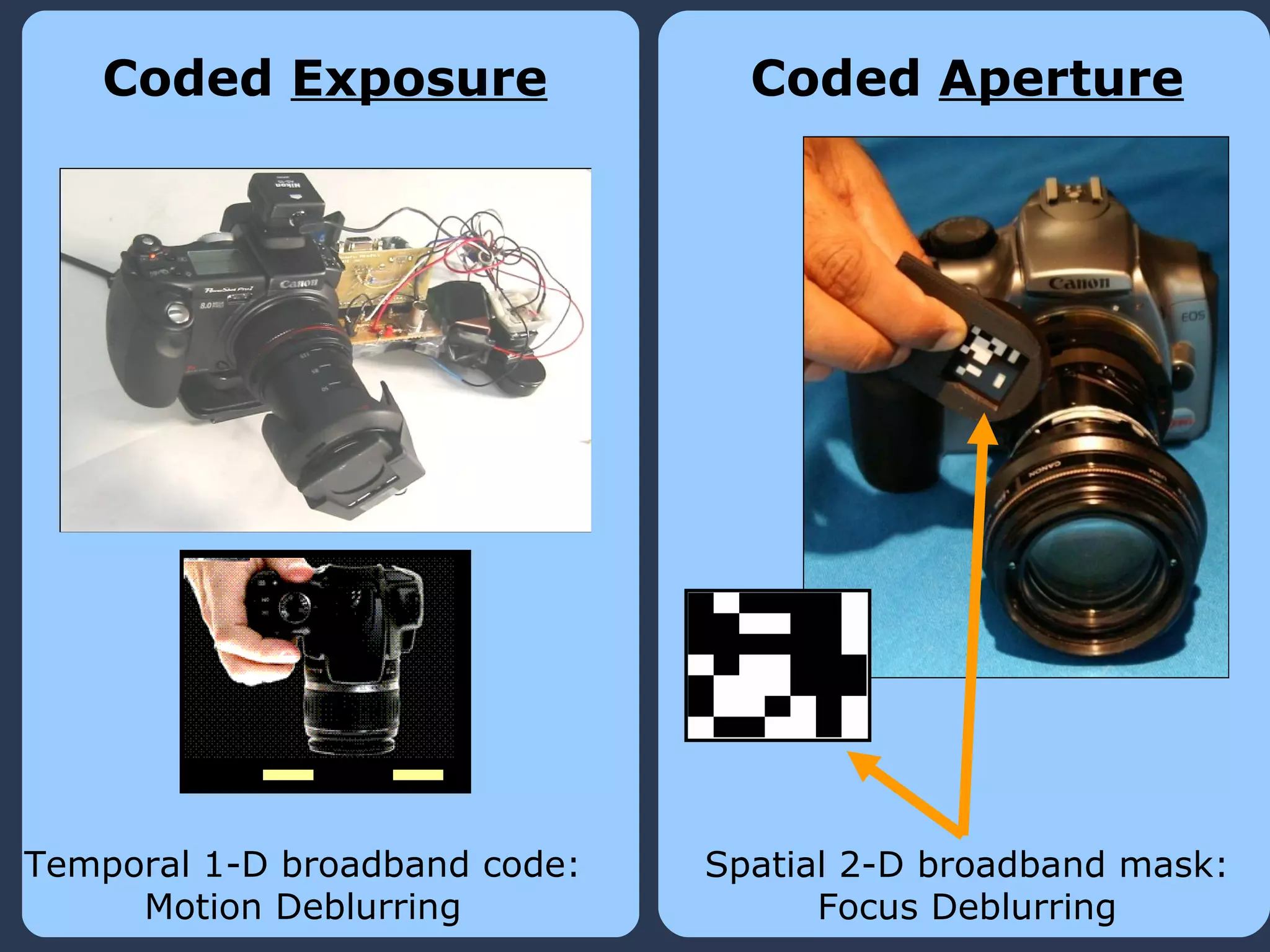


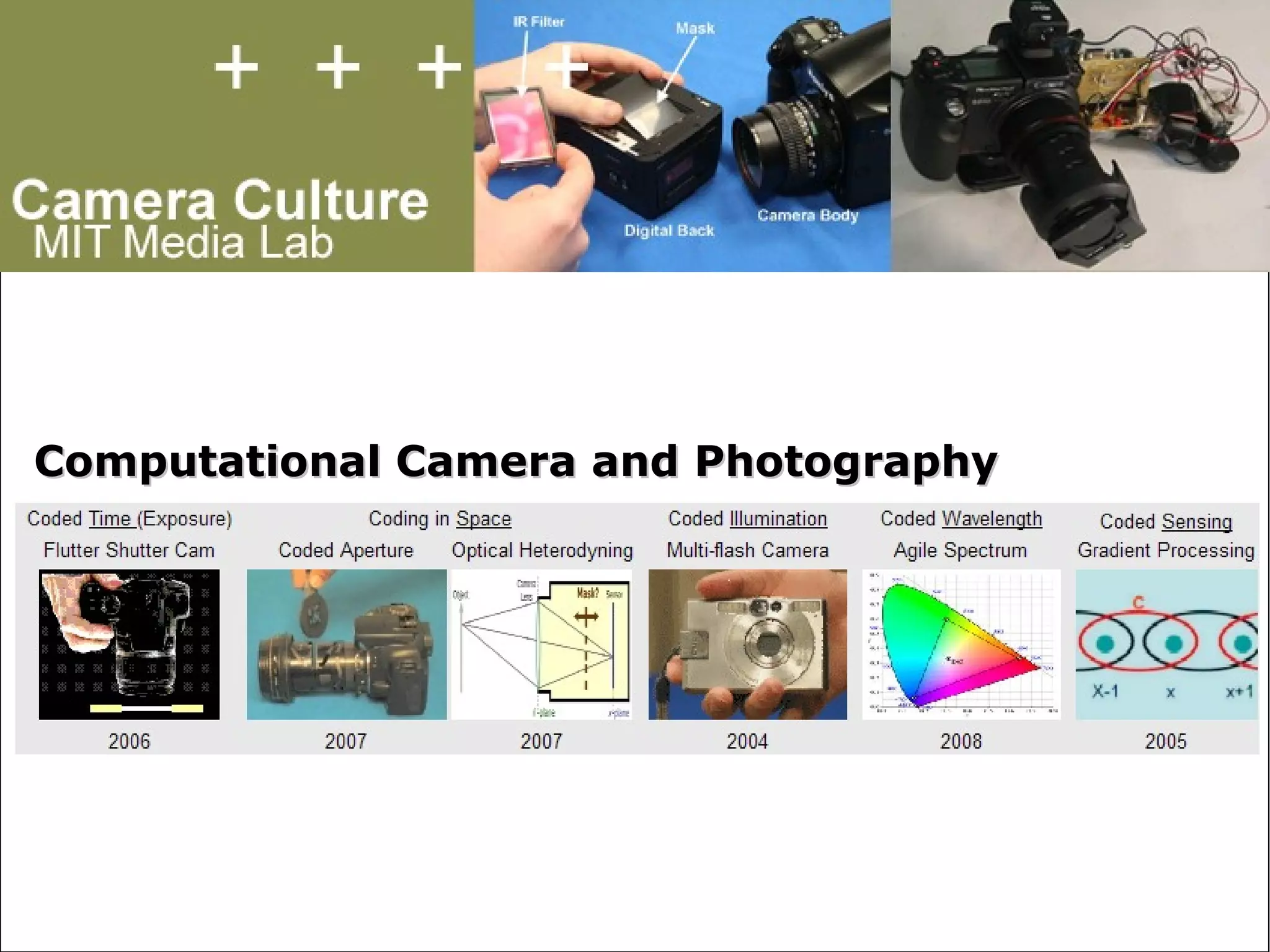
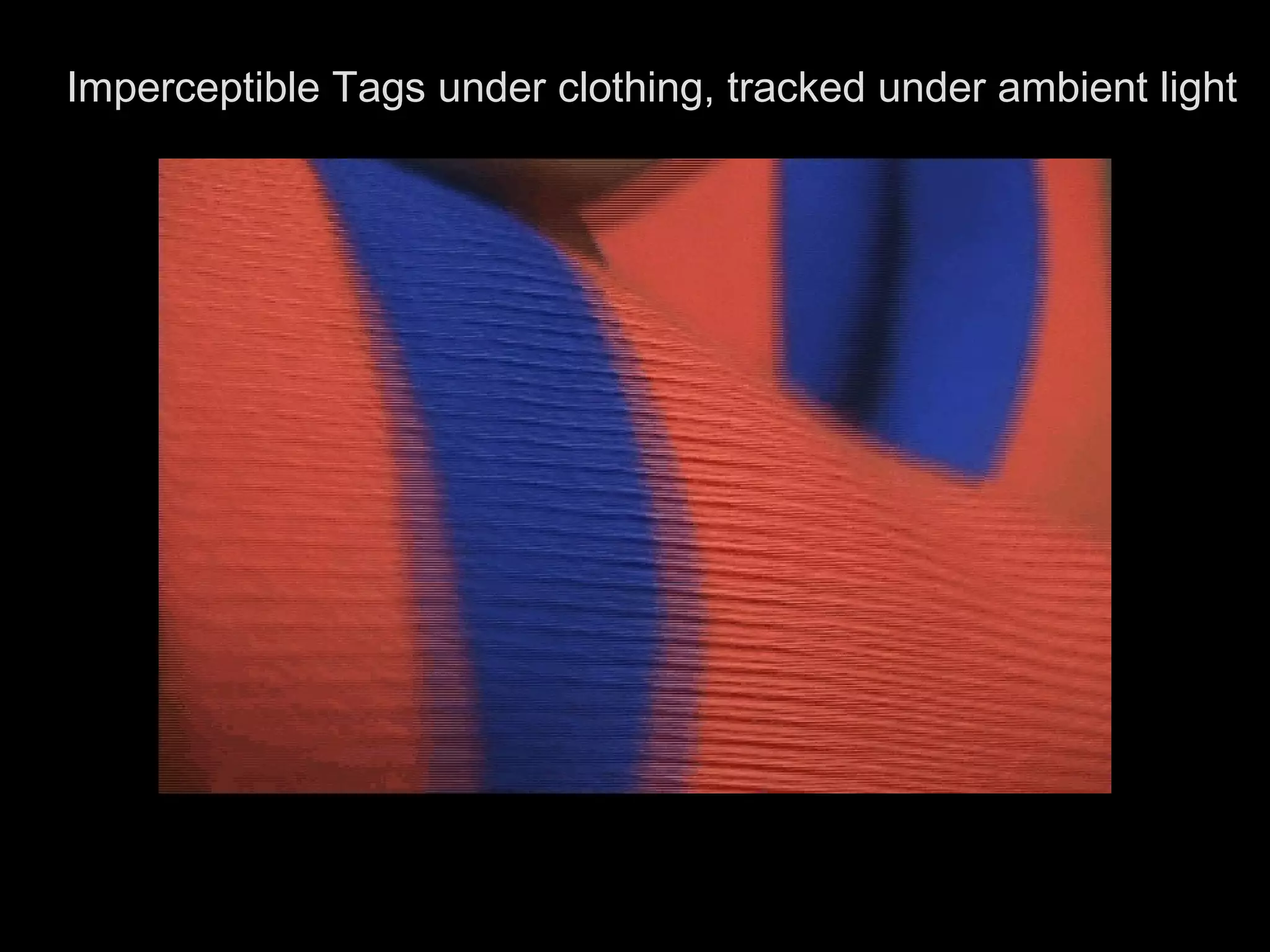
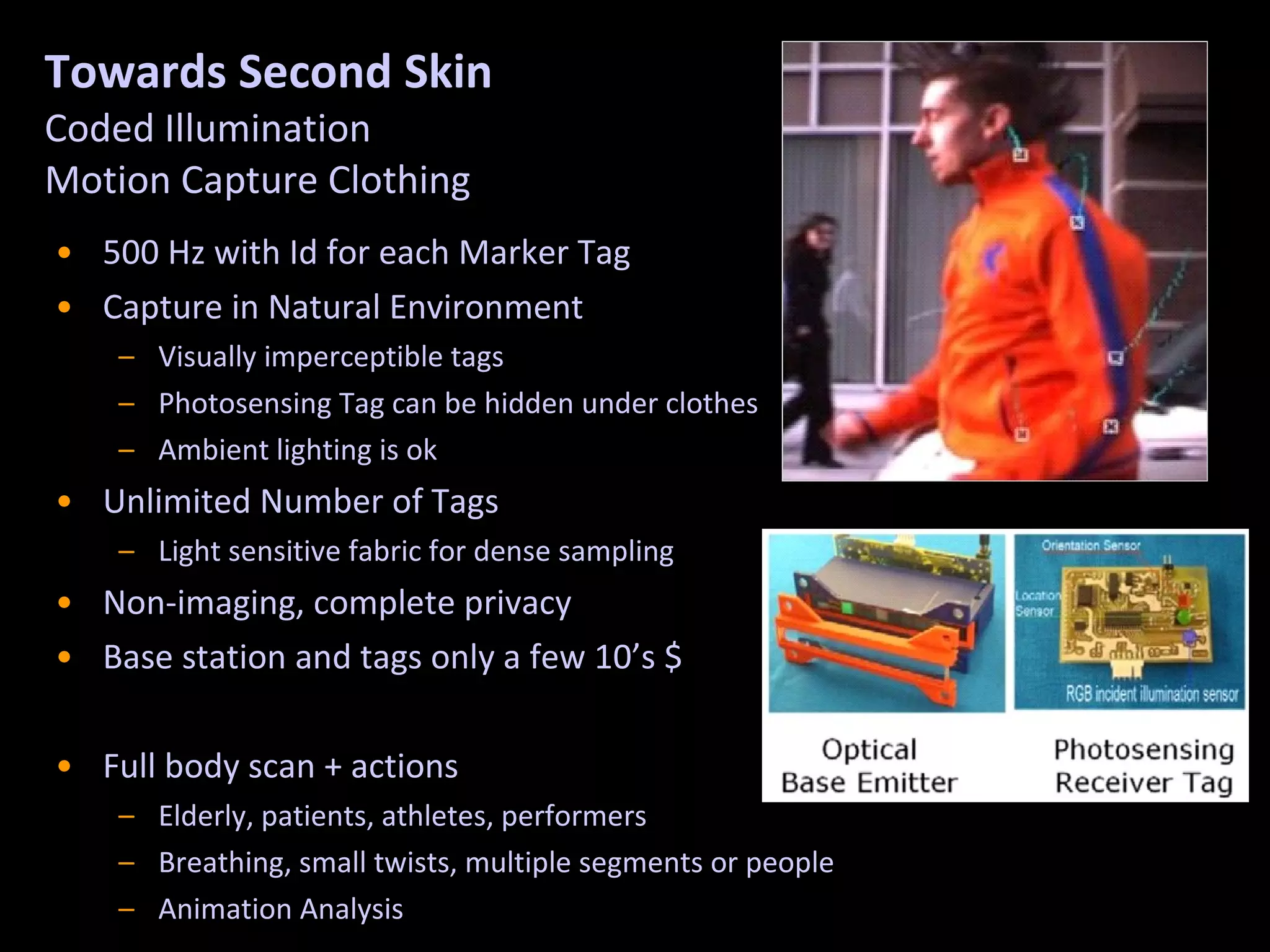
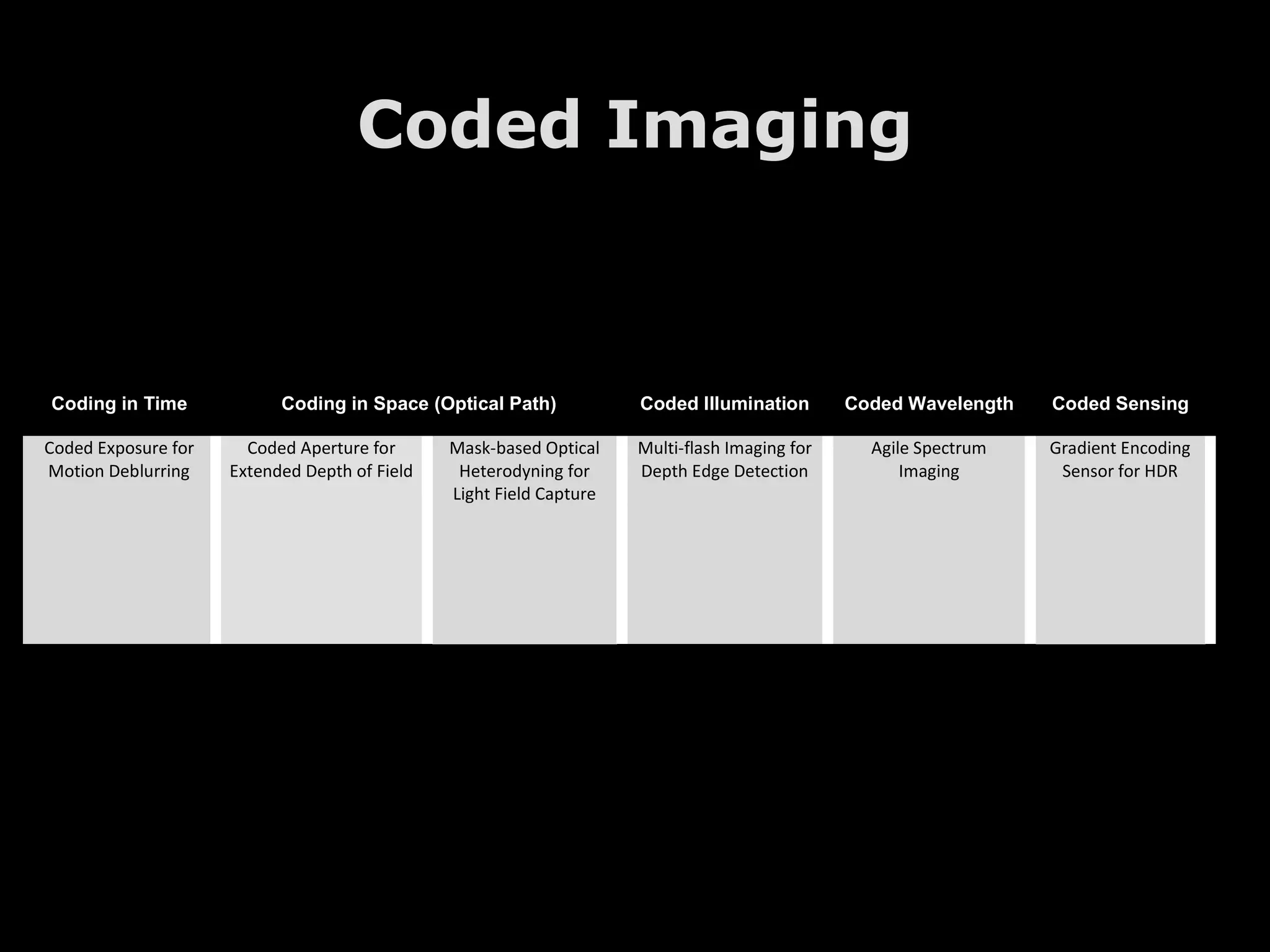
![Coded Computational Photography Coded Exposure Motion Deblurring [2006] Coded Aperture Focus Deblurring [2007] Glare reduction [2008] Optical Heterodyning Light Field Capture [2007] Coded Illumination Motion Capture [2007] Multi-flash: Shape Contours [2004] Coded Spectrum Agile Wavelength Profile [2008] Epsilon-> Coded ->Essence Photography http://raskar.info](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-28-2048.jpg)
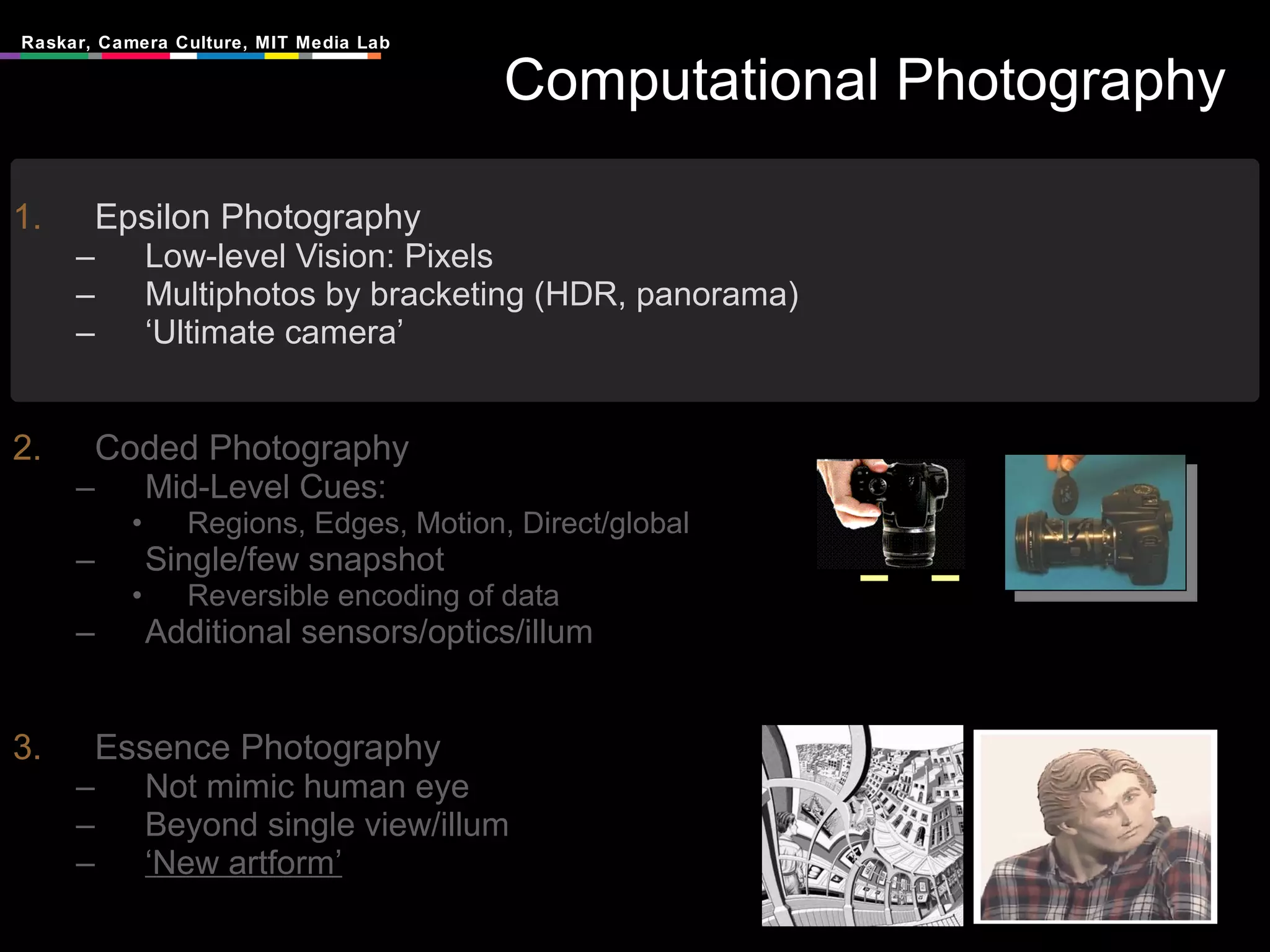
![Epsilon Photography Dynamic range Exposure braketing [Mann-Picard, Debevec] Wider FoV Stitching a panorama Depth of field Fusion of photos with limited DoF [Agrawala04] Noise Flash/no-flash image pairs [ Petschnigg04, Eisemann04] Frame rate Triggering multiple cameras [Wilburn05, Shechtman02]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-30-2048.jpg)
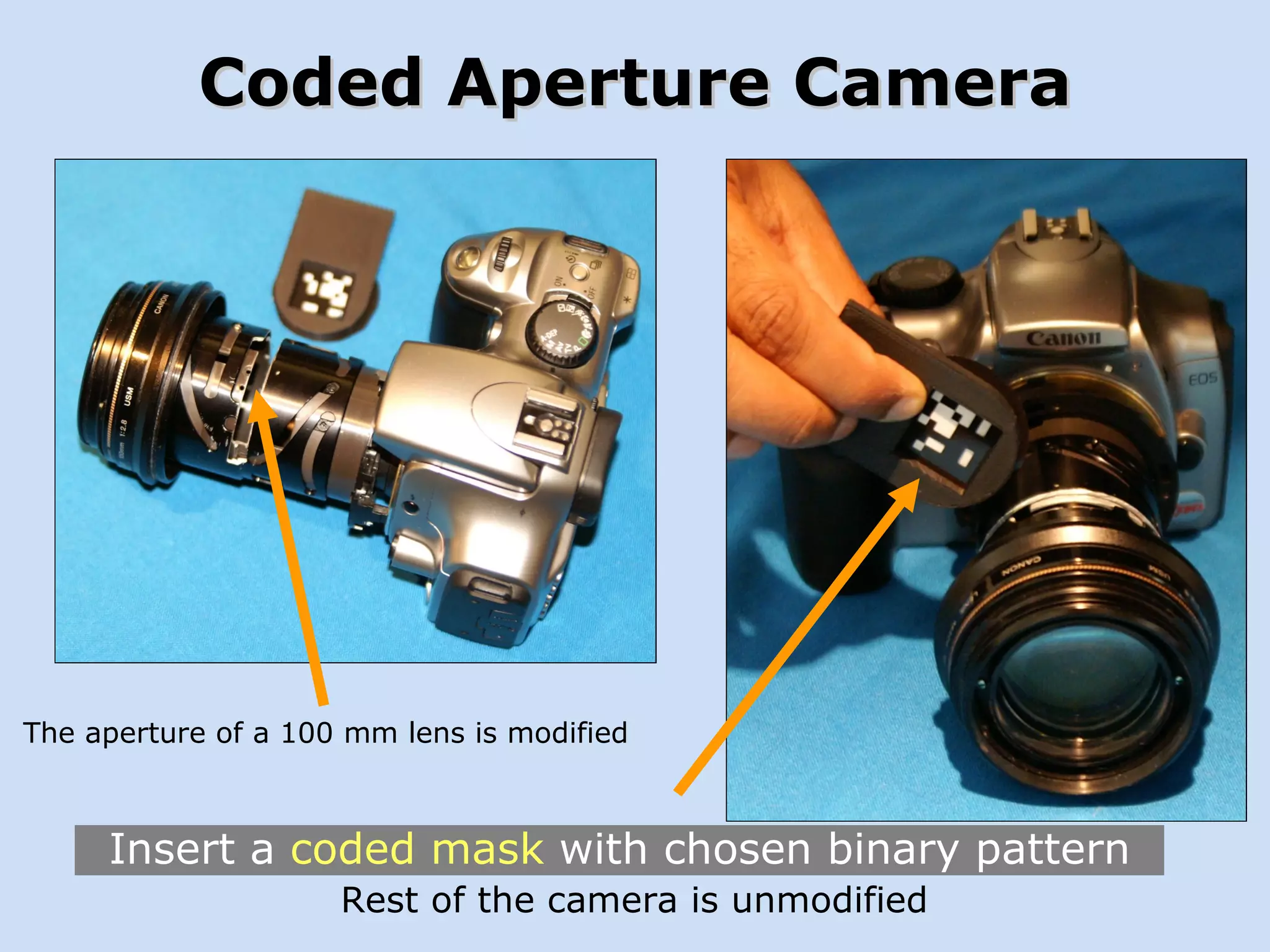
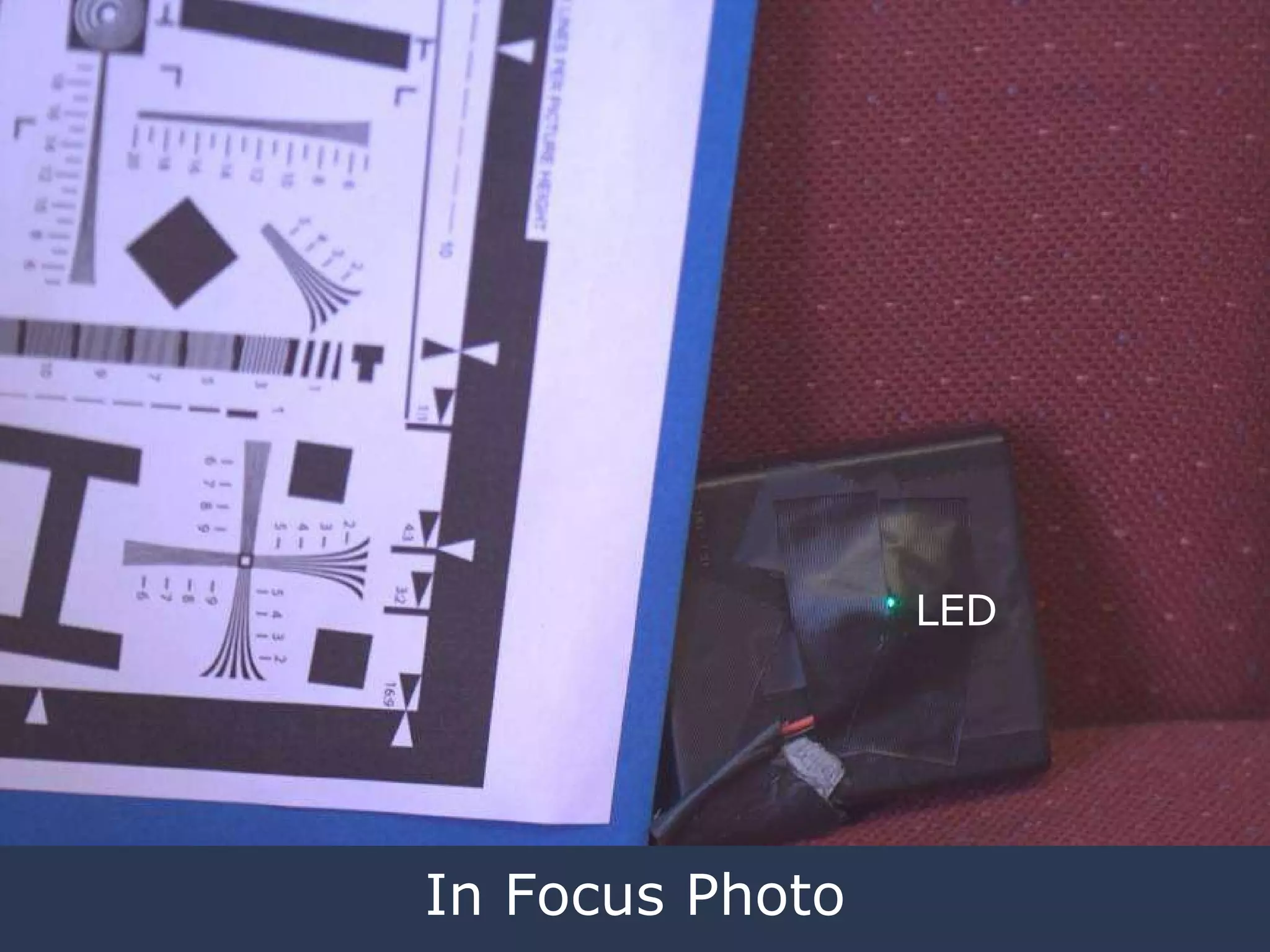
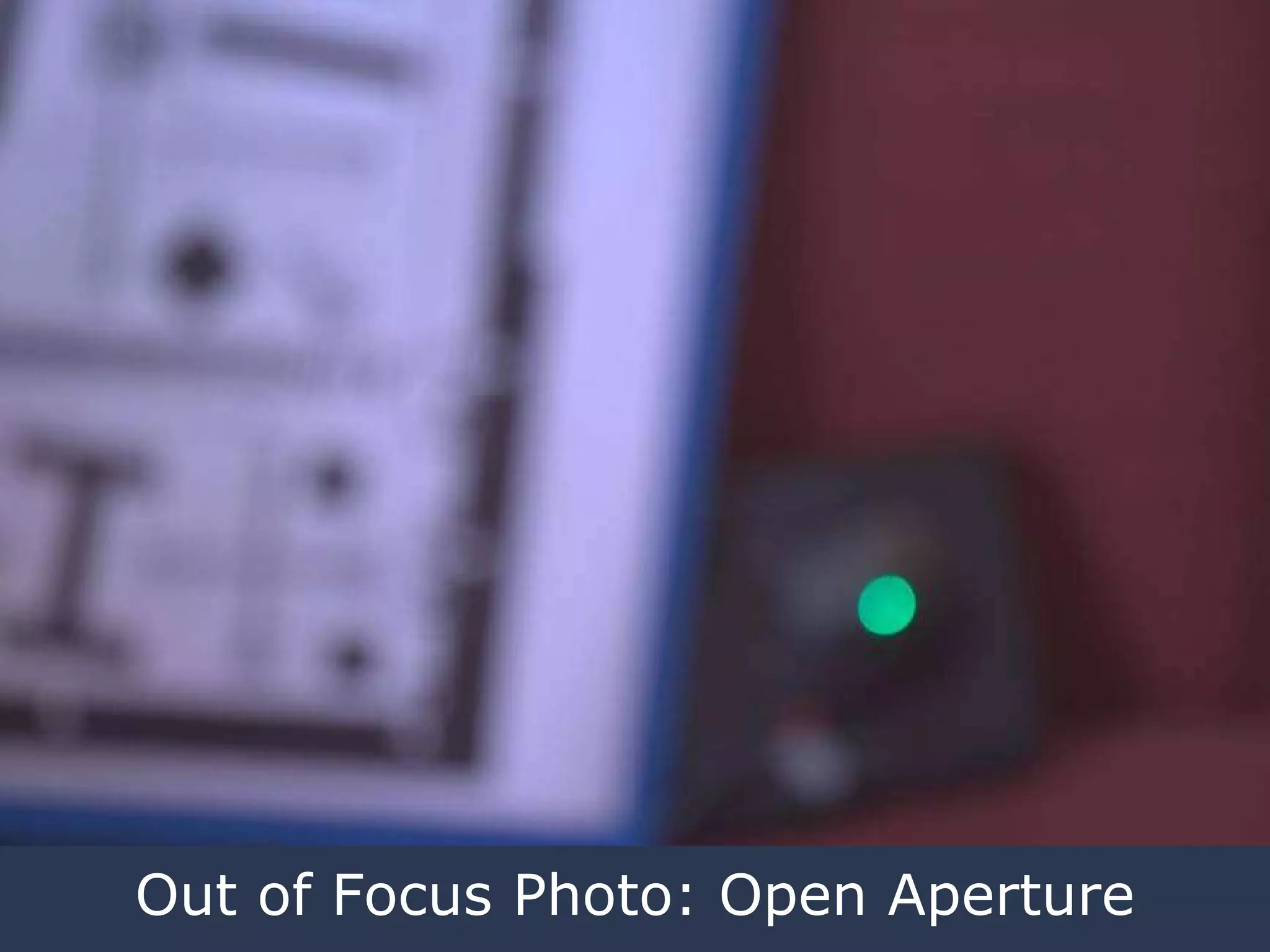
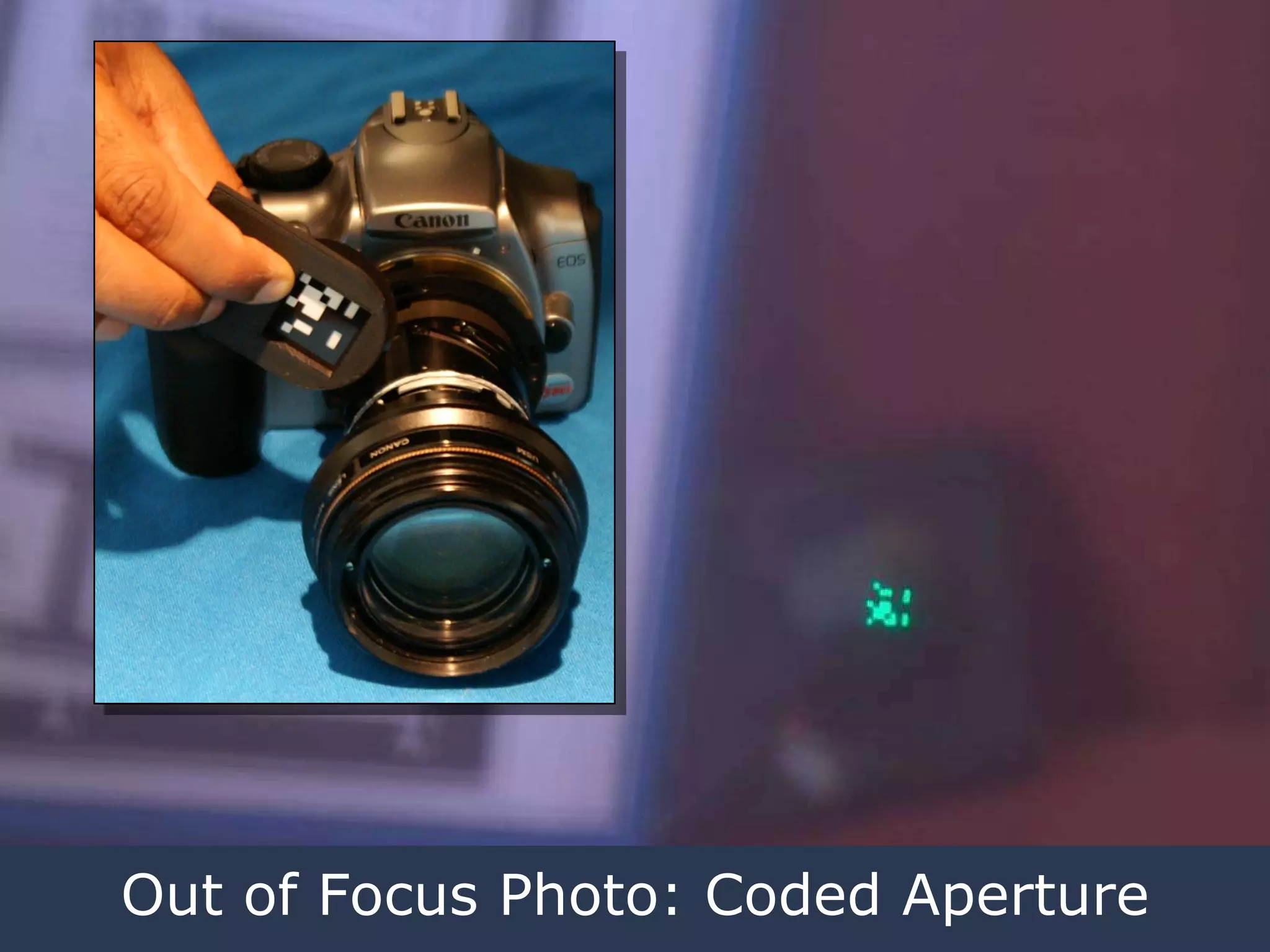
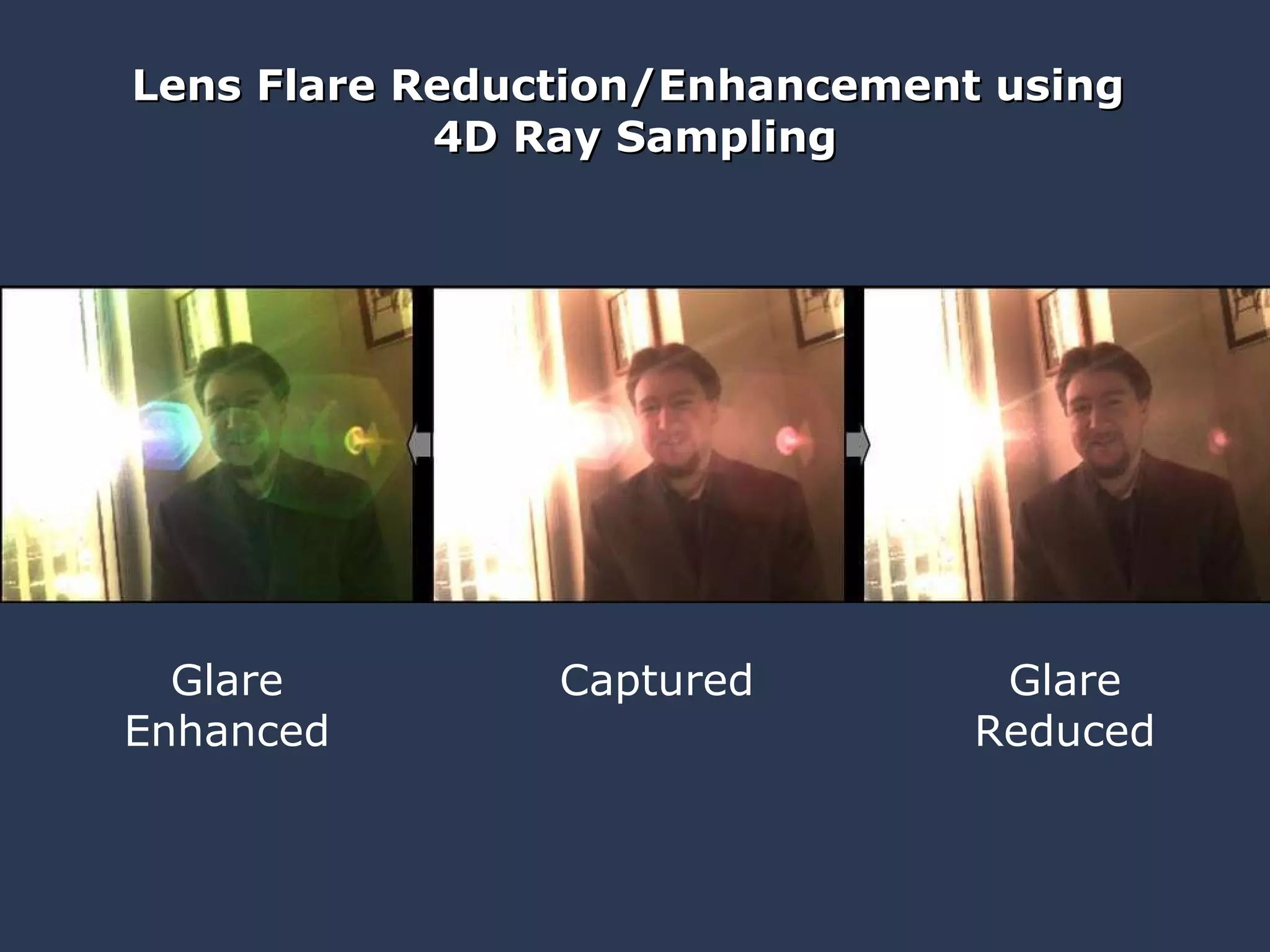
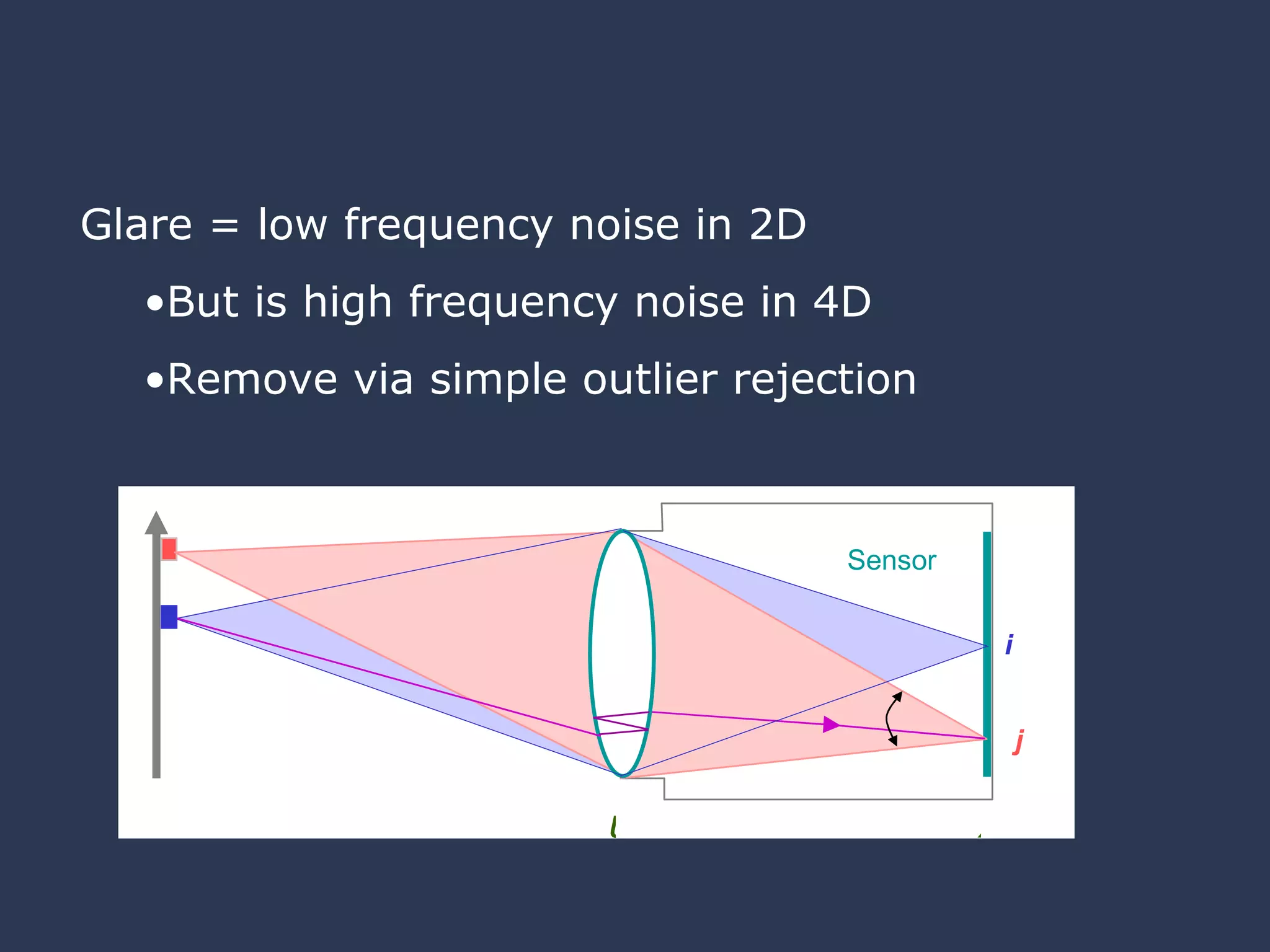
![3D Stereo of multiple cameras Higher dimensional LF Light Field Capture lenslet array [Adelson92, Ng05] , ‘3D lens’ [Georgiev05] , heterodyne masks [Veeraraghavan07] Boundaries and Regions Multi-flash camera with shadows [Raskar08] Fg/bg matting [Chuang01,Sun06] Deblurring Engineered PSF Motion: Flutter shutter [Raskar06] , Camera Motion [Levin08] Defocus: Coded aperture, Wavefront coding [Cathey95] Global vs direct illumination High frequency illumination [Nayar06] Glare decomposition [Talvala07, Raskar08] Coded Sensor Gradient camera [Tumblin05]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-32-2048.jpg)
![Capturing the Essence of Visual Experience Exploiting online collections Photo-tourism [Snavely2006] Scene Completion [Hays2007] Multi-perspective Images Multi-linear Perspective [Jingyi Yu, McMillan 2004] Unwrap Mosaics [Rav-Acha et al 2008] Video texture panoramas [Agrawal et al 2005] Non-photorealistic synthesis Motion magnification [Liu05] Image Priors Learned features and natural statistics Face Swapping: [Bitouk et al 2008] Data-driven enhancement of facial attractiveness [Leyvand et al 2008] Deblurring [Fergus et al 2006, Jia et al 2008]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-34-2048.jpg)
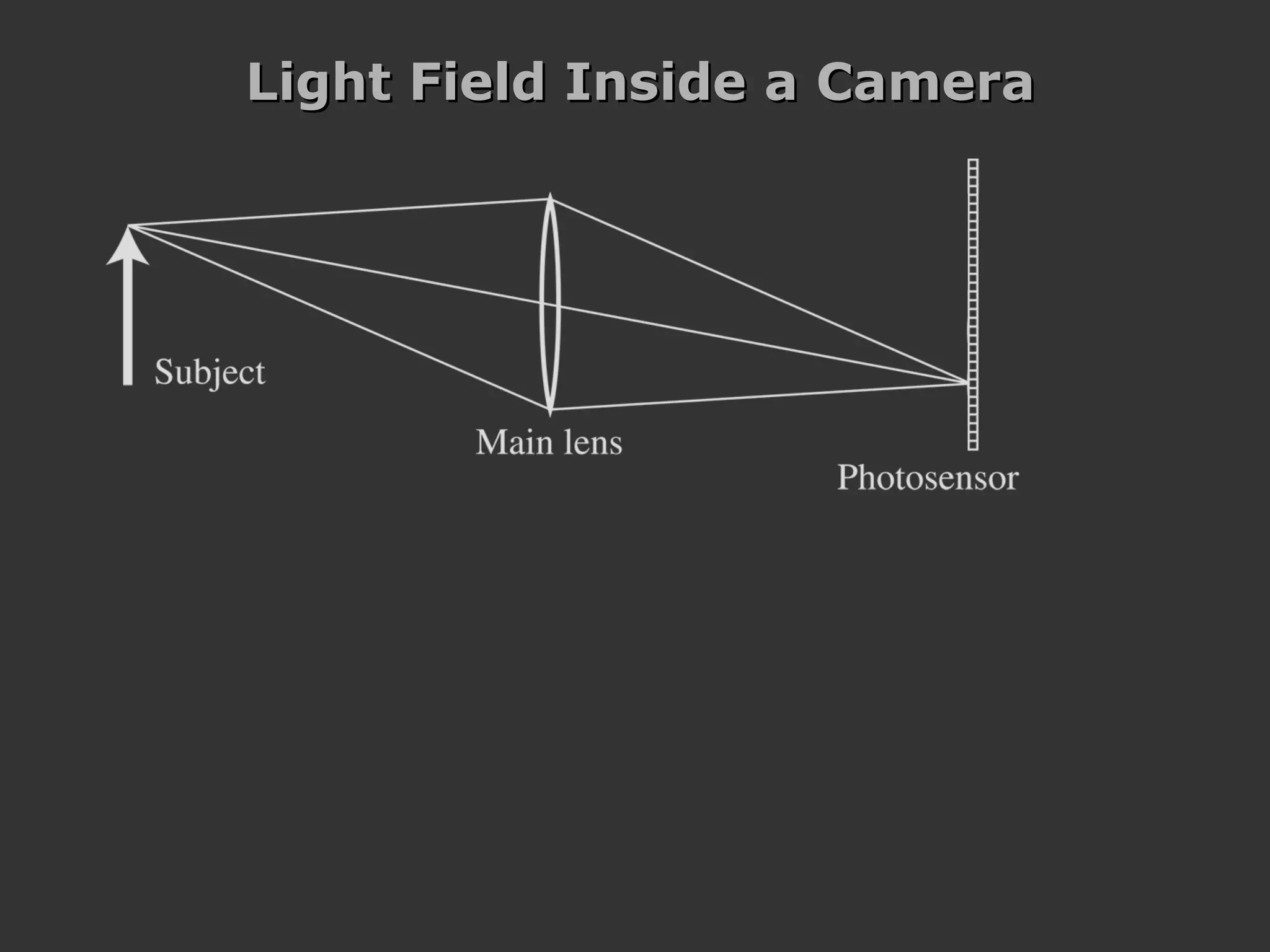
![Lenslet-based Light Field camera [Adelson and Wang, 1992, Ng et al. 2005 ] Light Field Inside a Camera](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-39-2048.jpg)
![Stanford Plenoptic Camera [Ng et al 2005] 4000 × 4000 pixels ÷ 292 × 292 lenses = 14 × 14 pixels per lens Contax medium format camera Kodak 16-megapixel sensor Adaptive Optics microlens array 125 μ square-sided microlenses](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-40-2048.jpg)
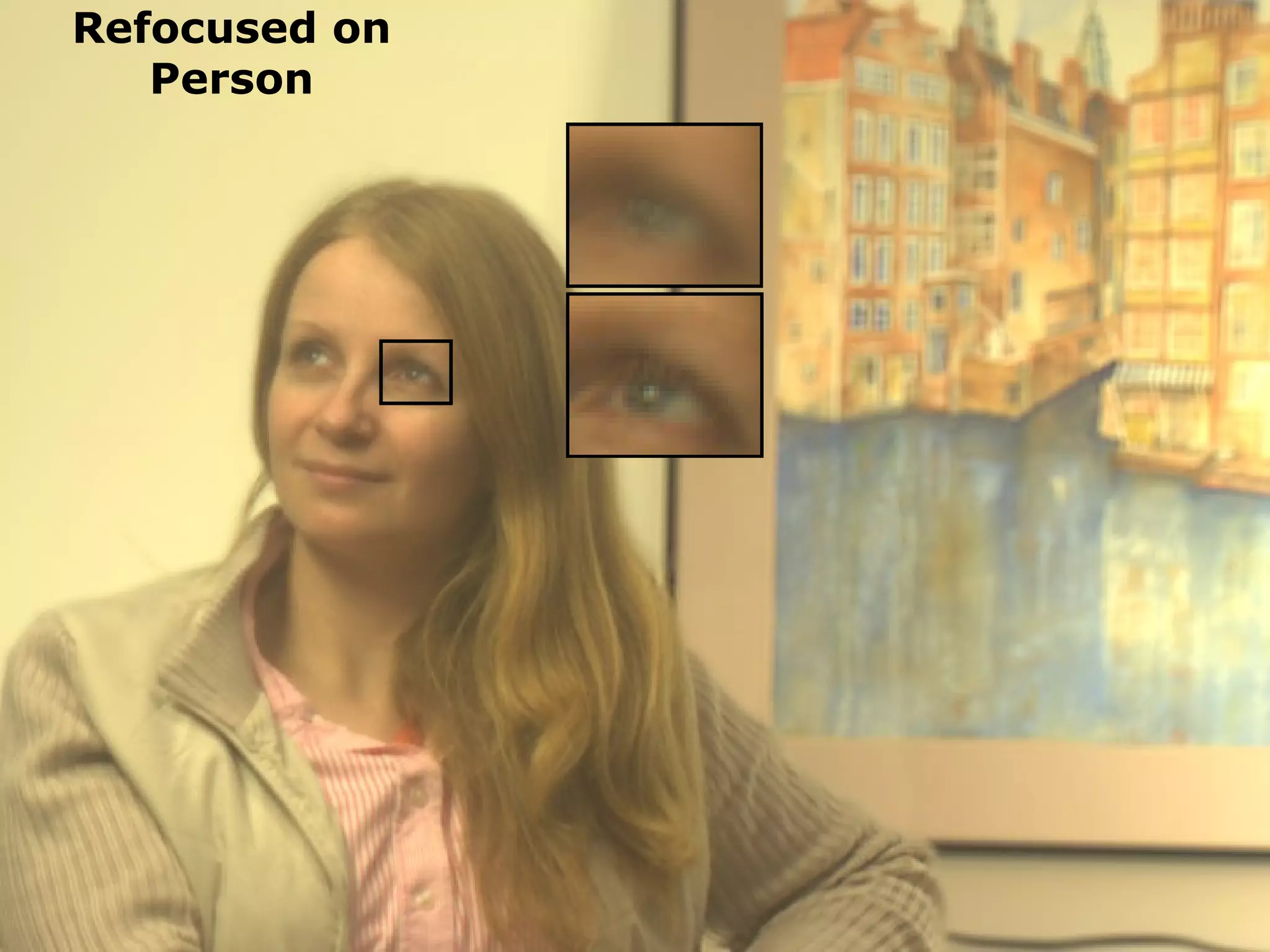
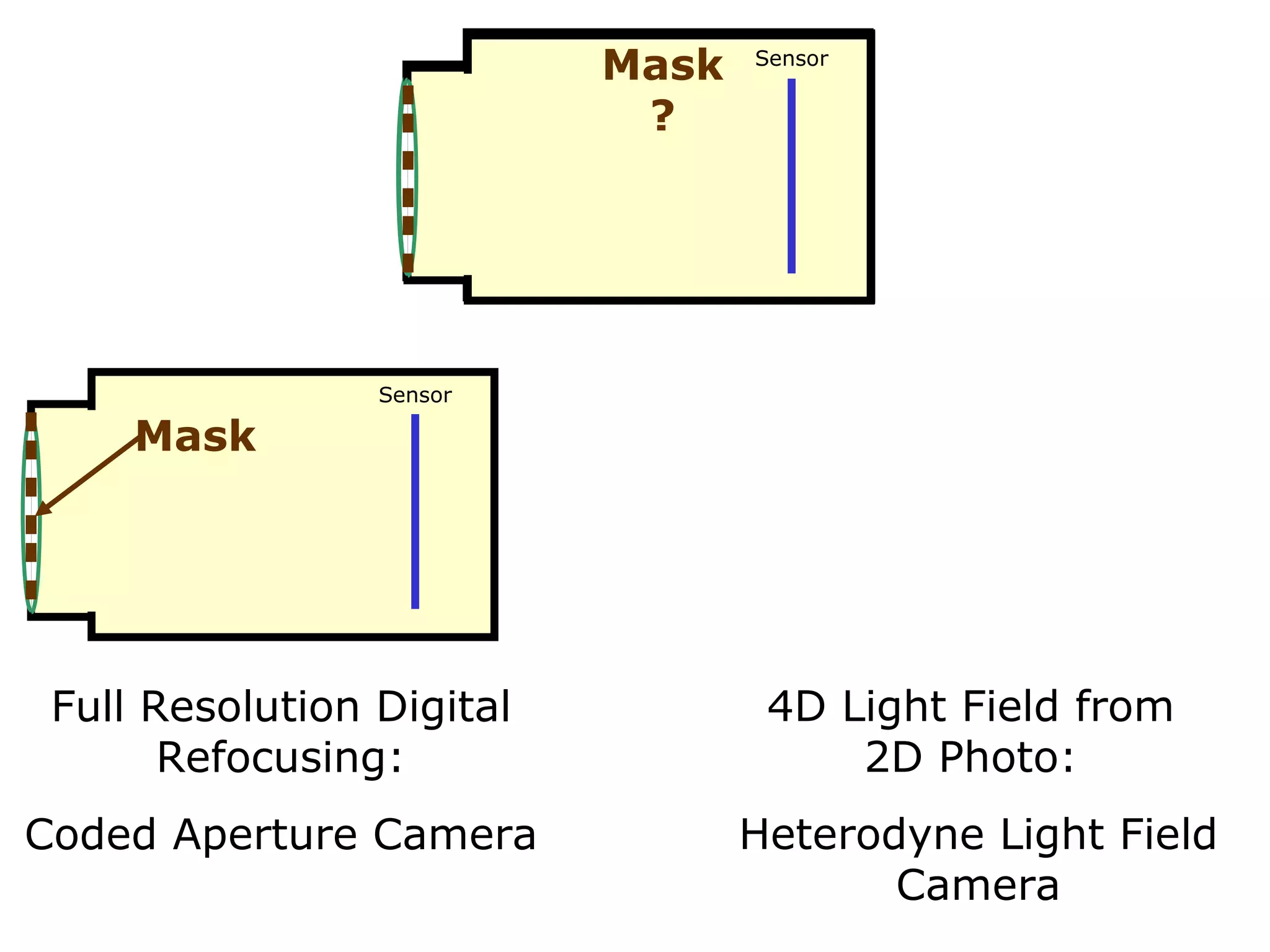
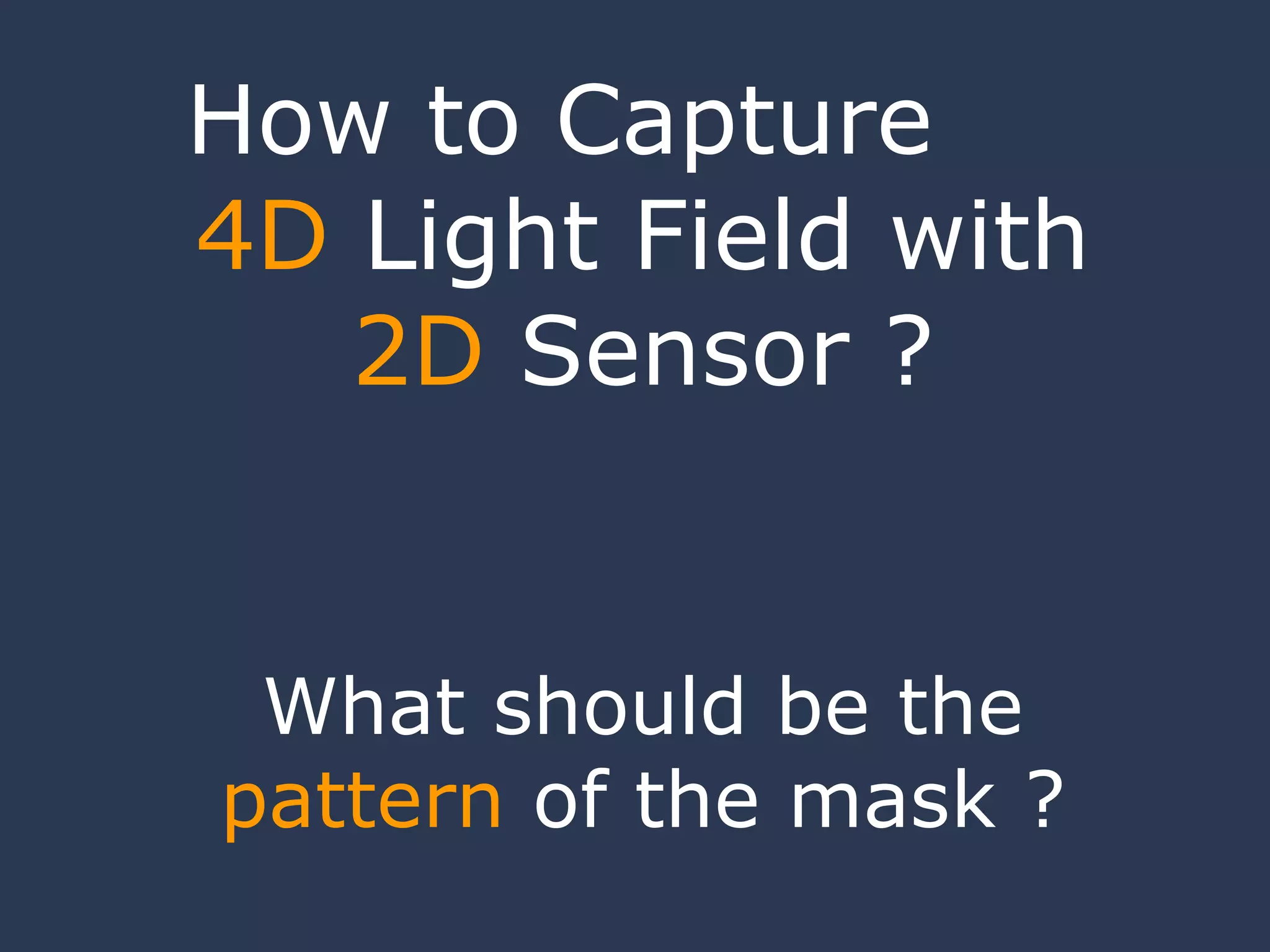
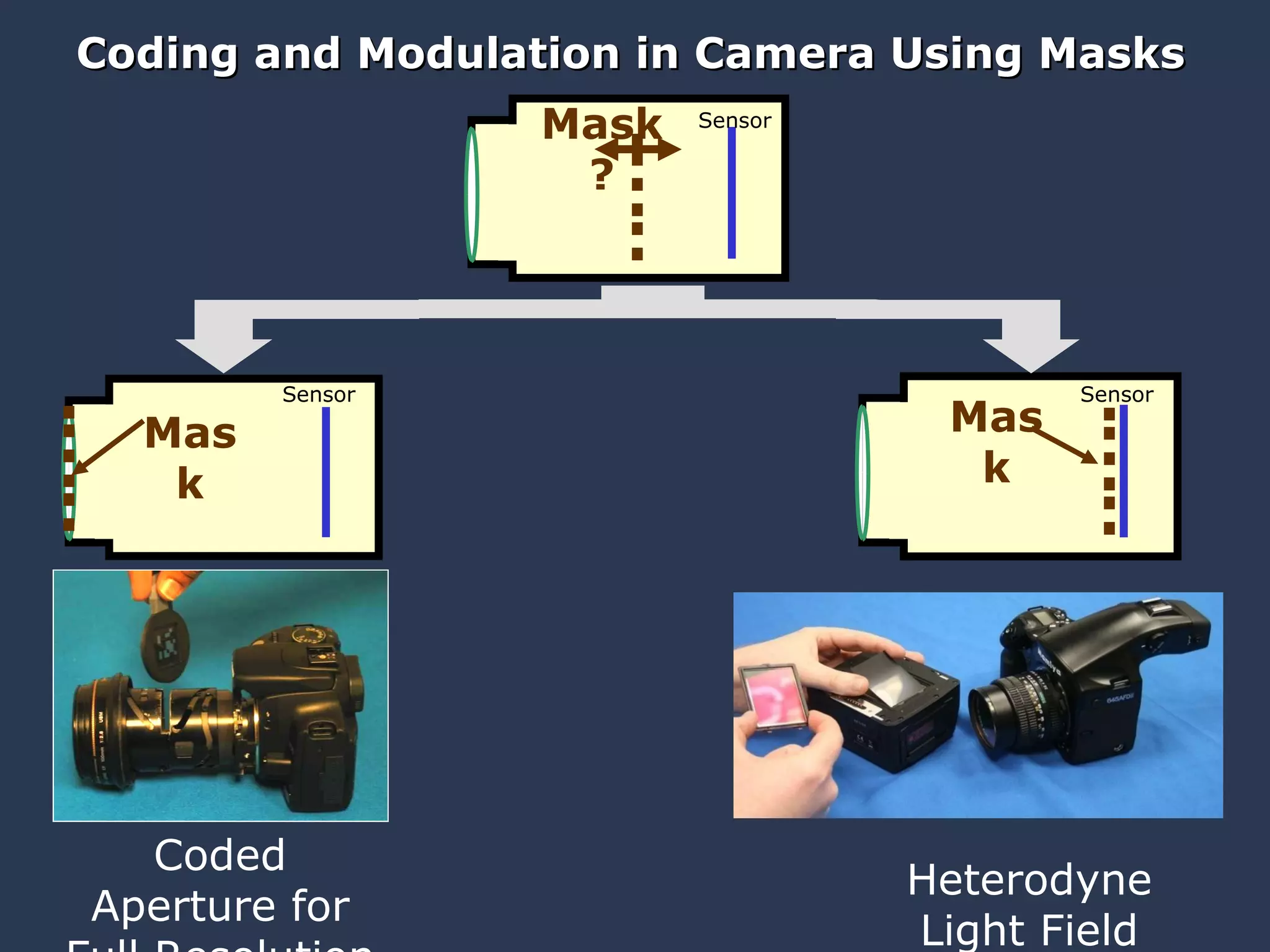
![Digital Refocusing [Ng et al 2005] Can we achieve this with a Mask alone?](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-41-2048.jpg)
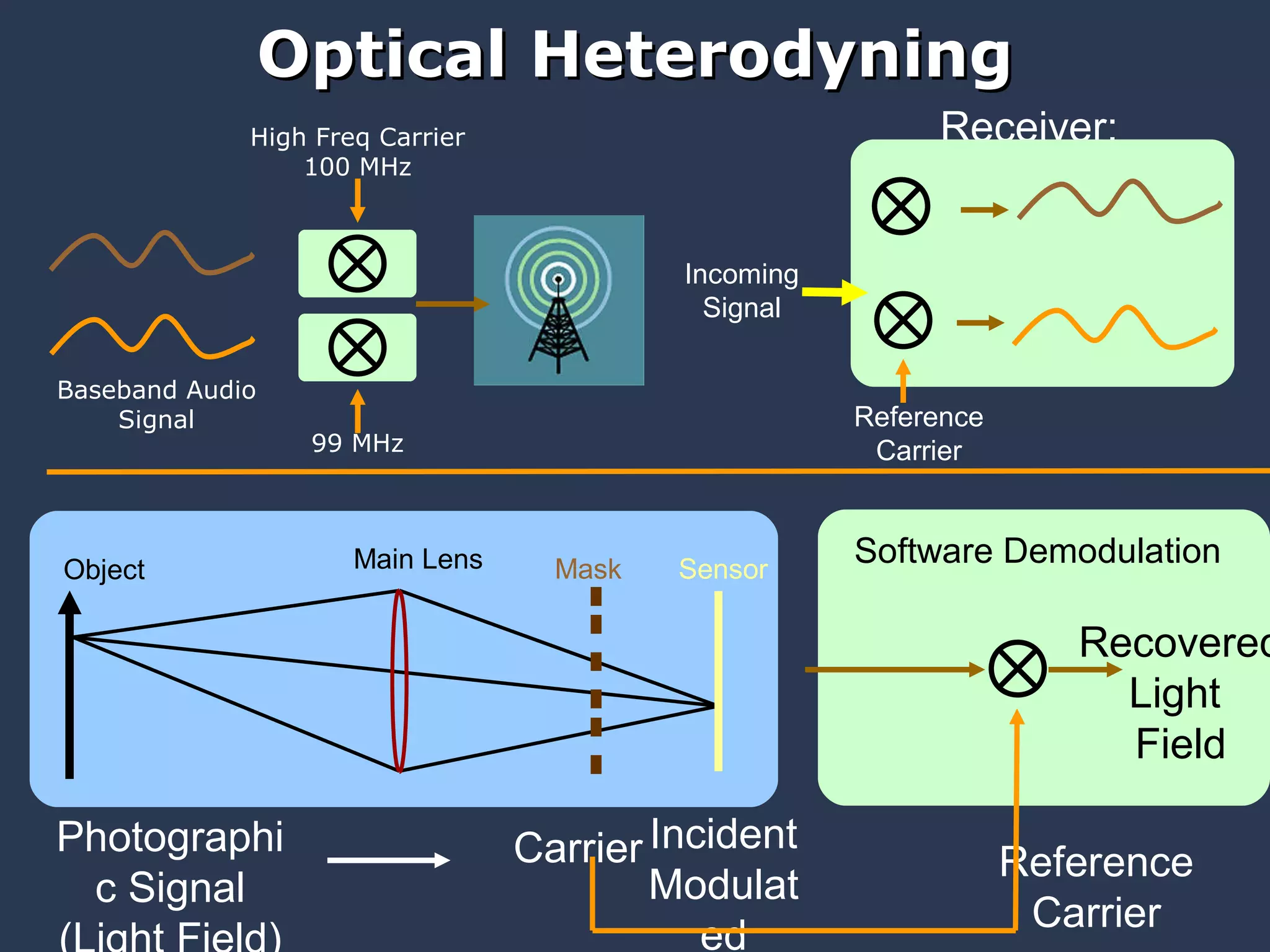
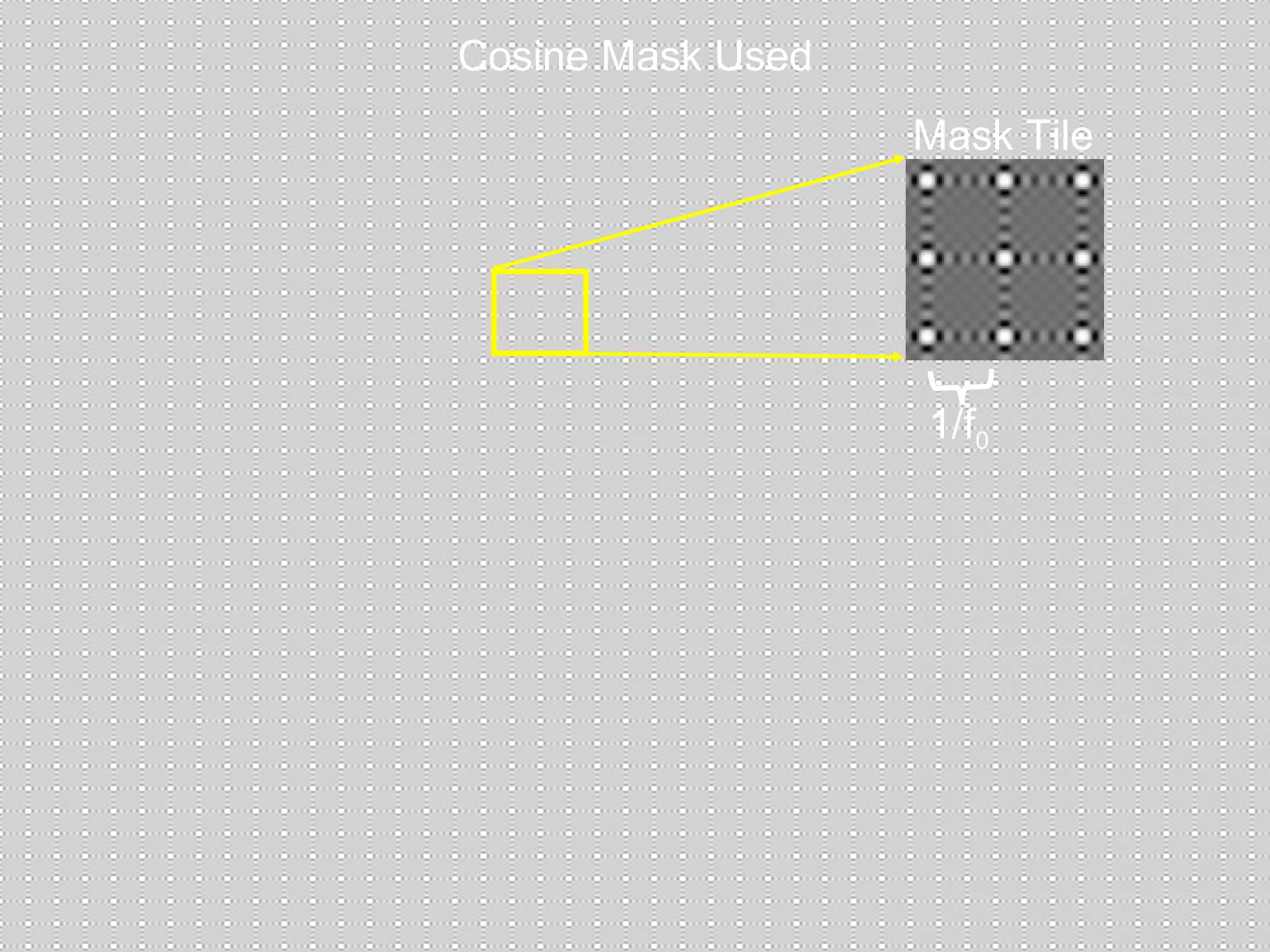
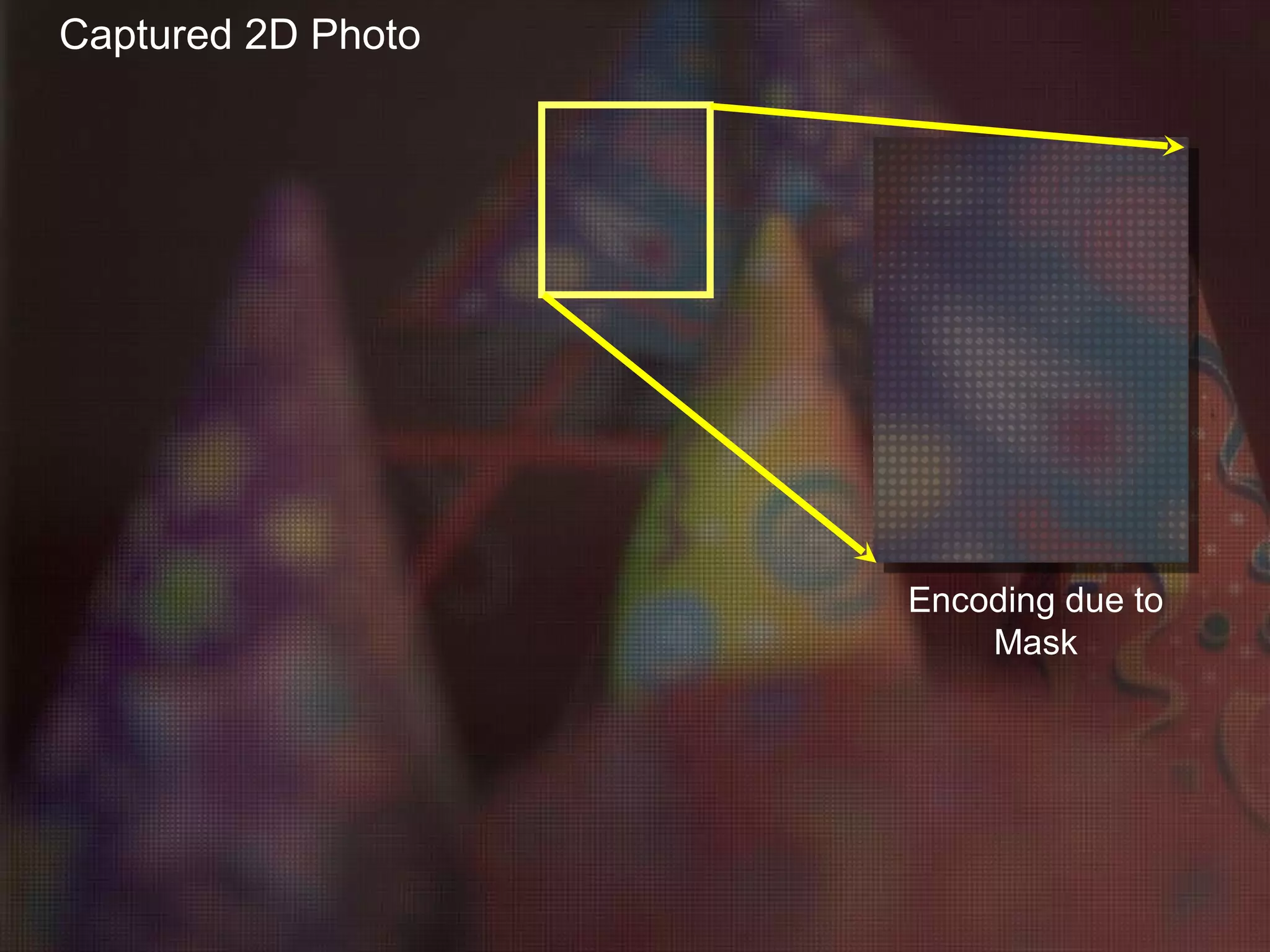
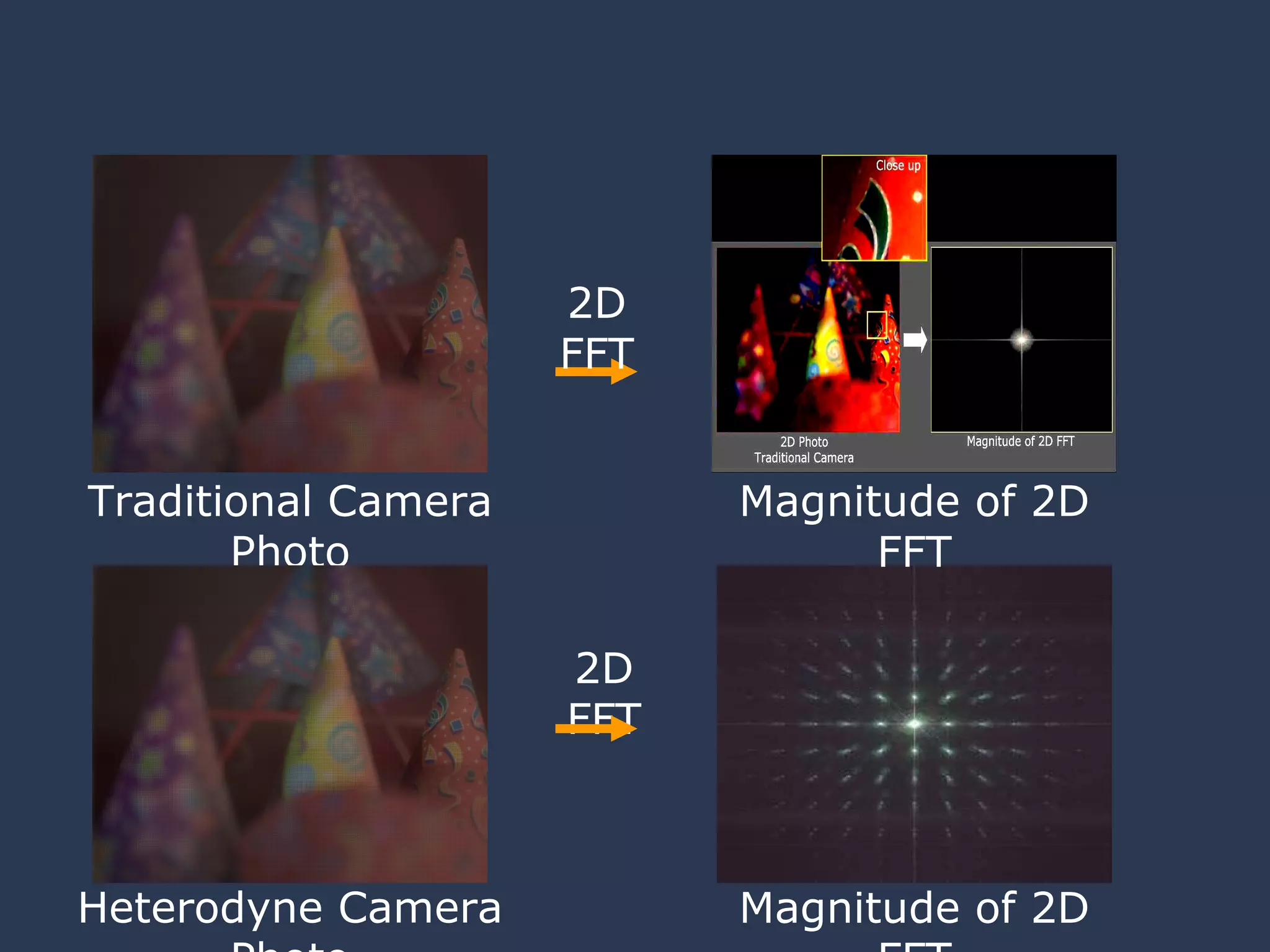
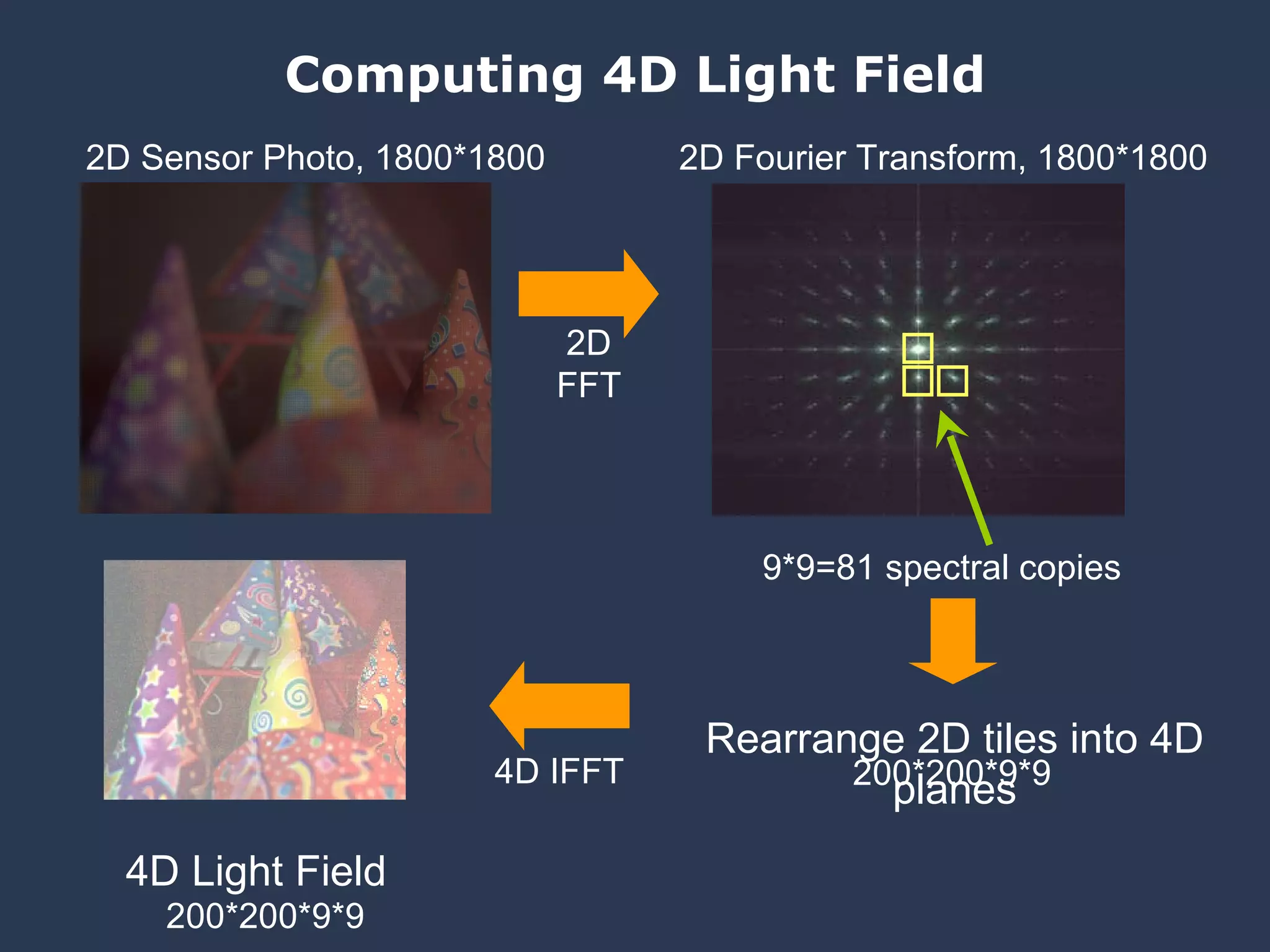
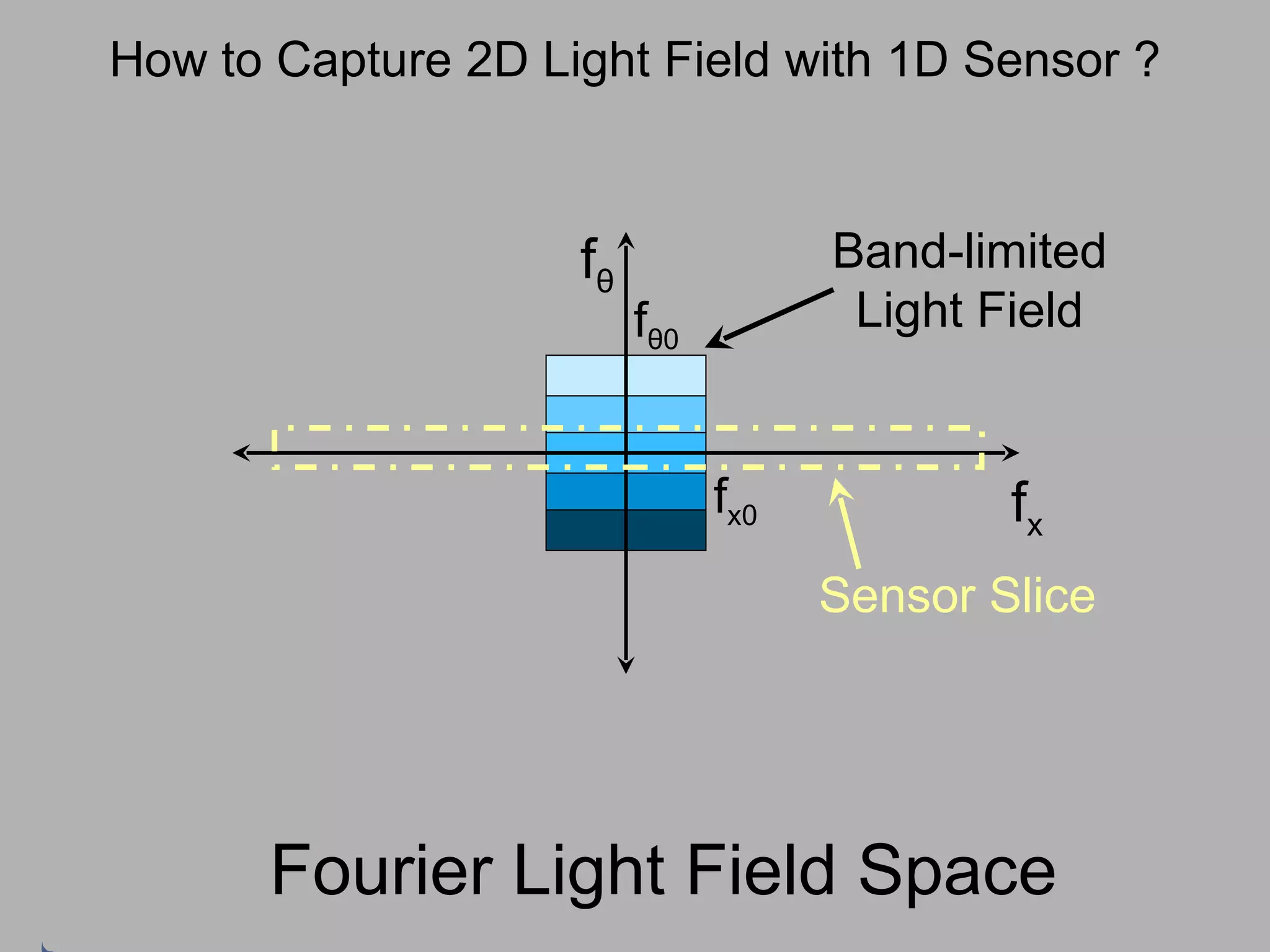
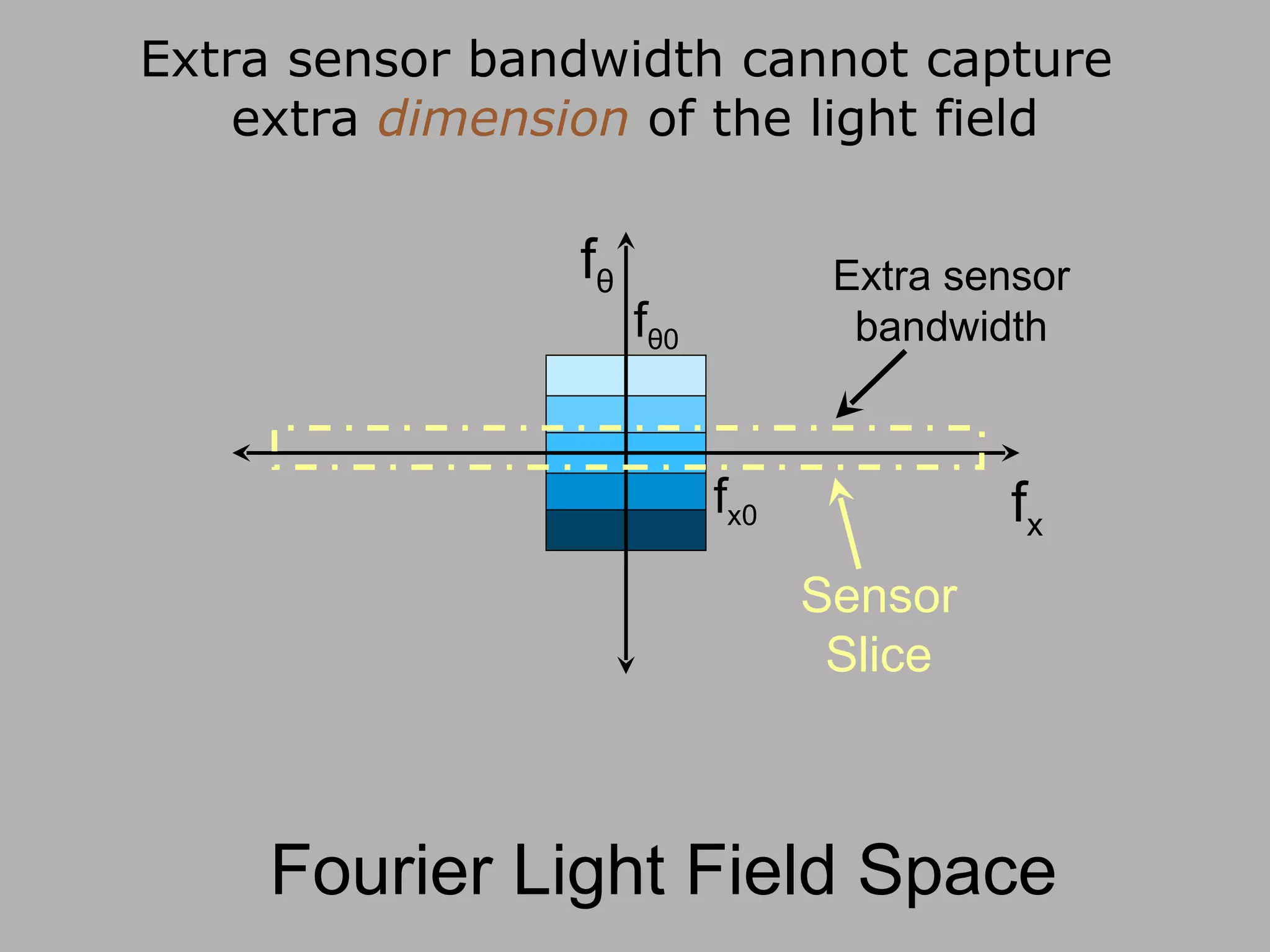
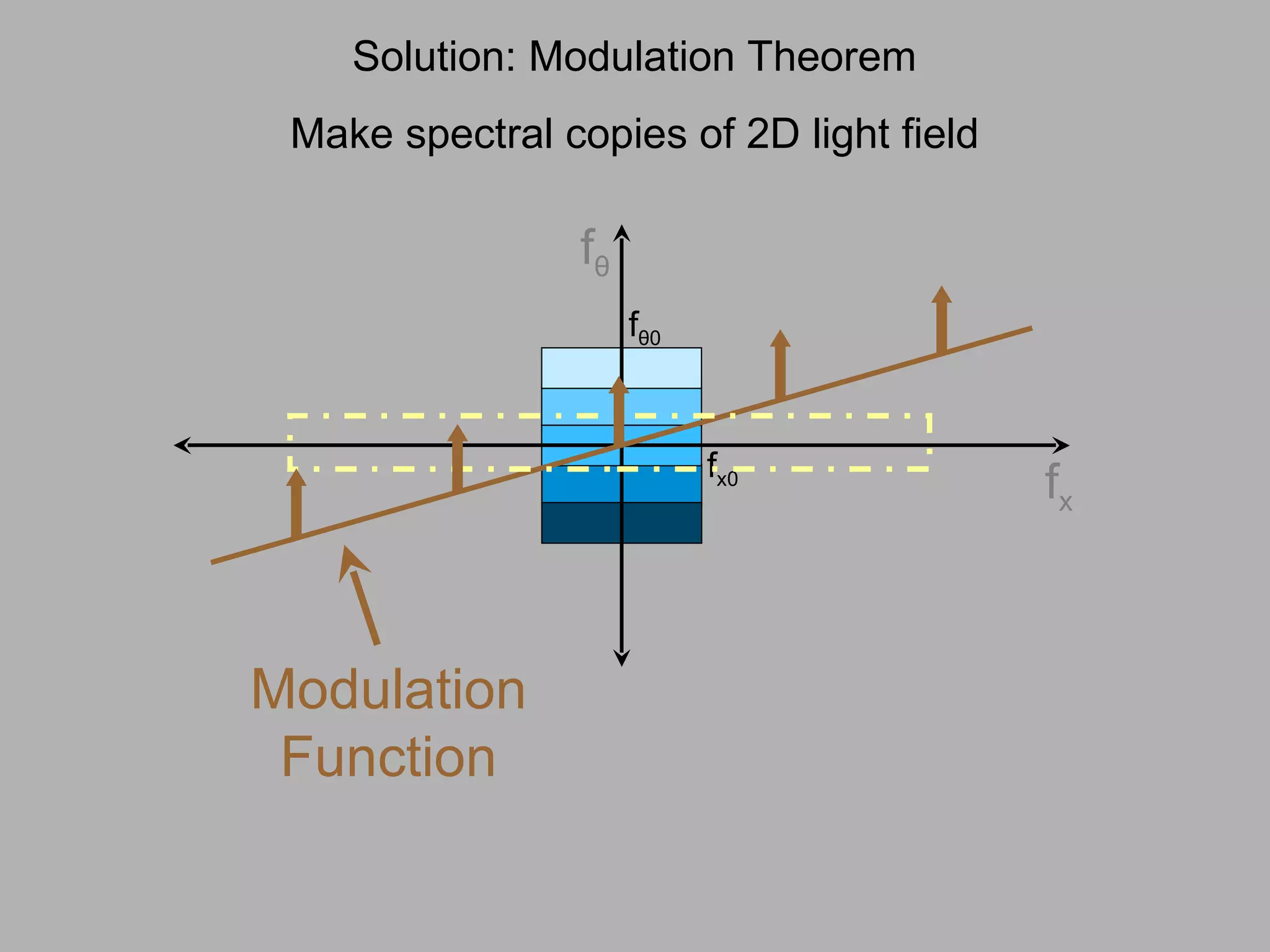
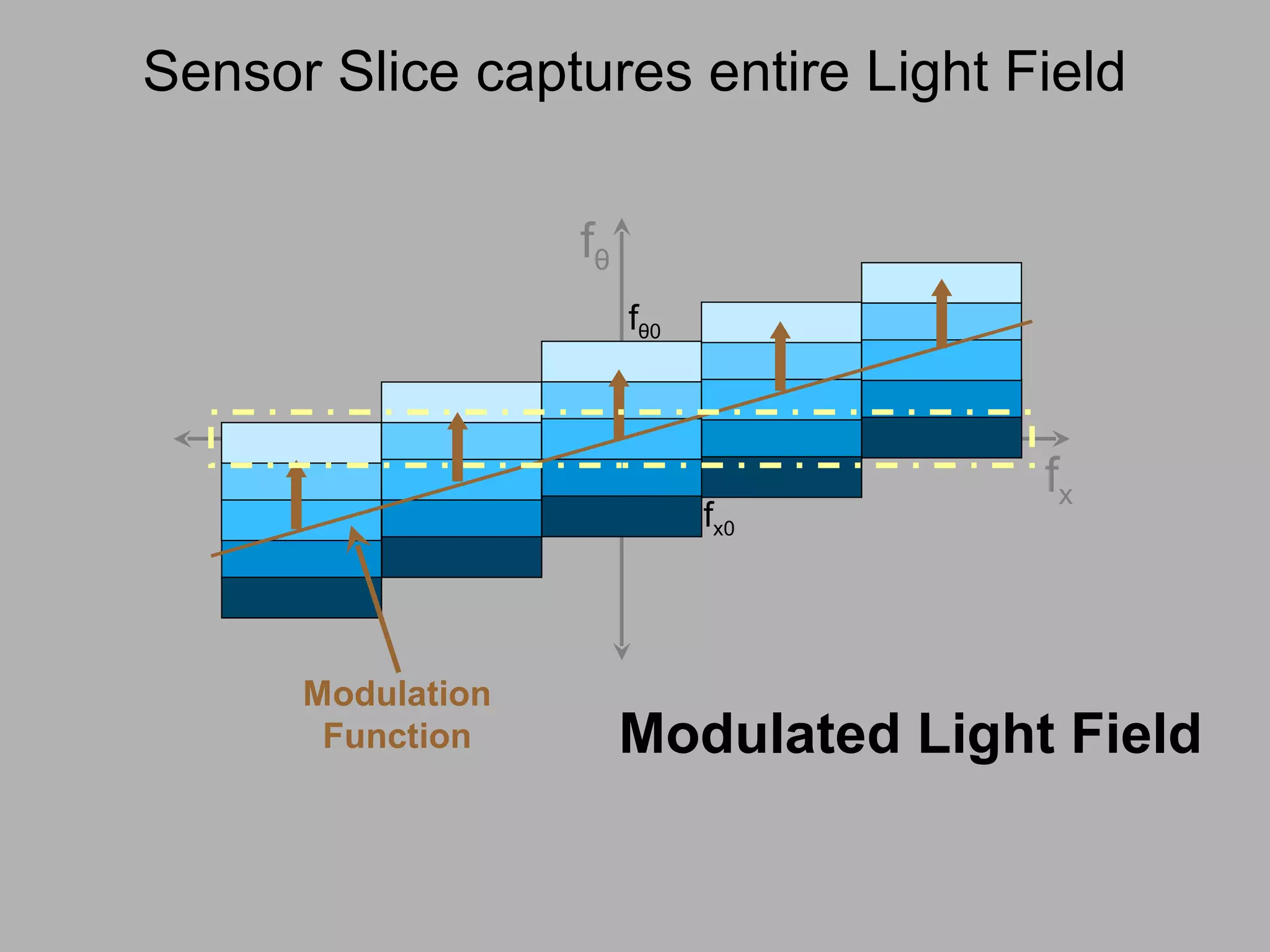
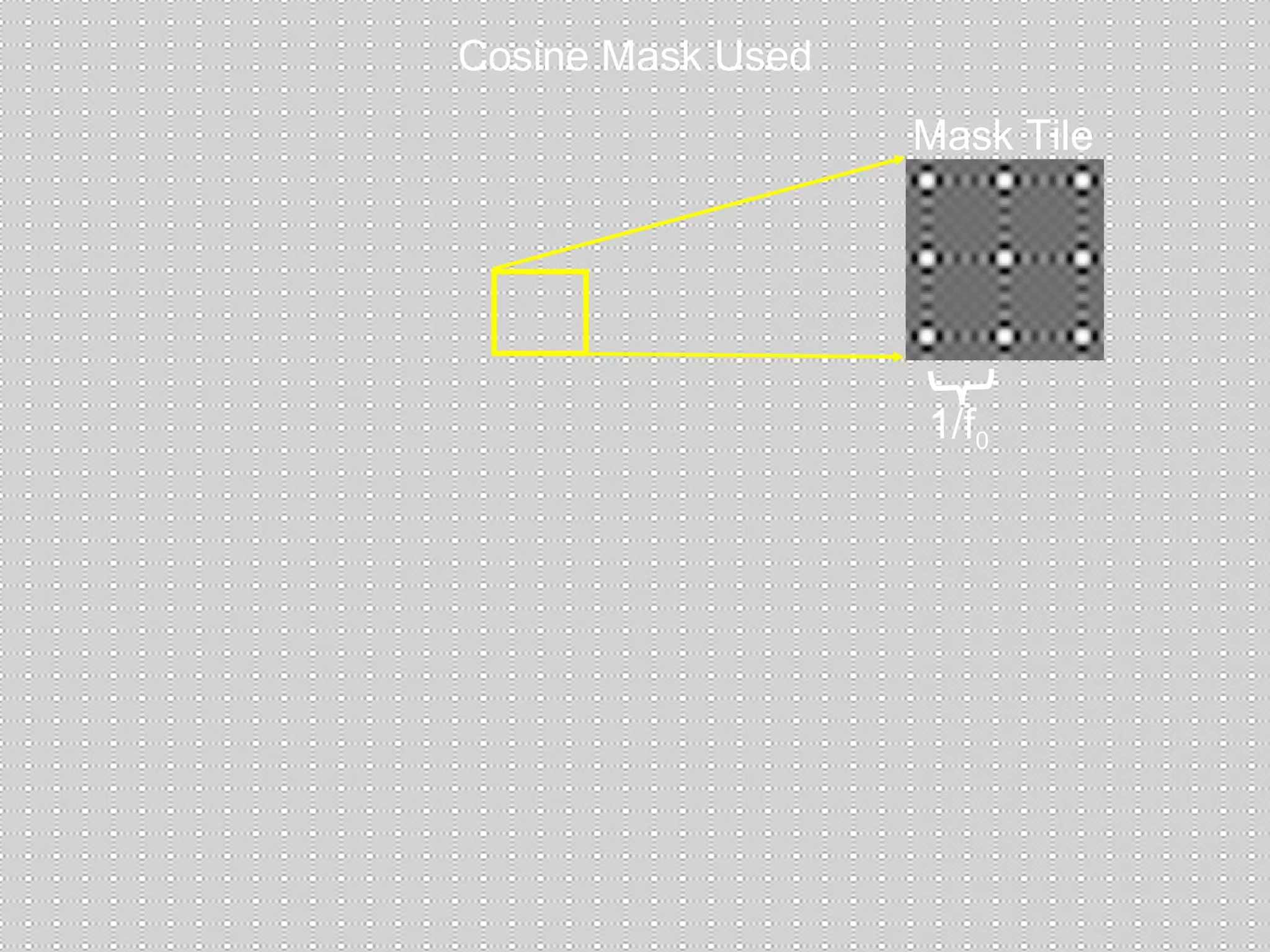
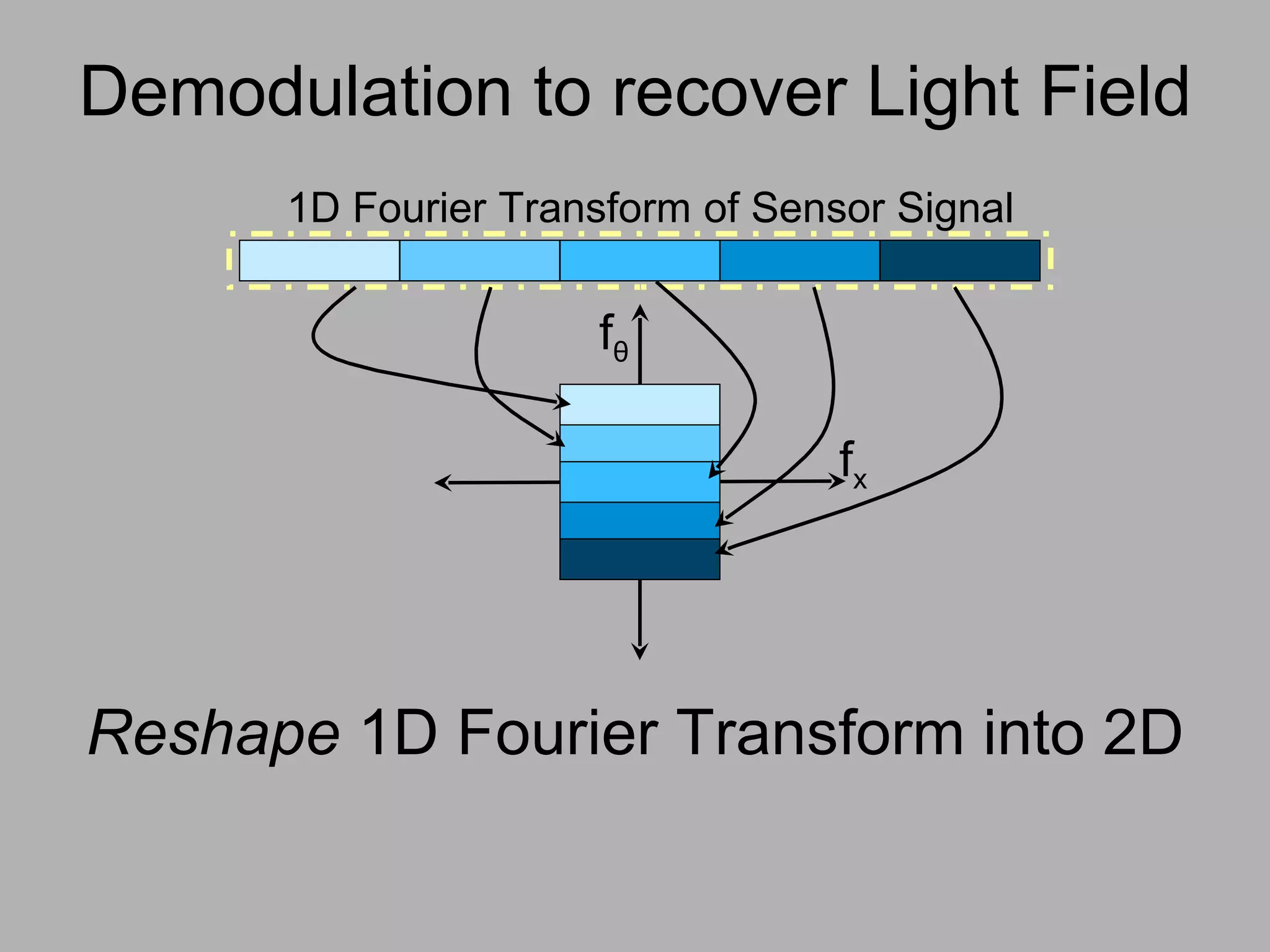
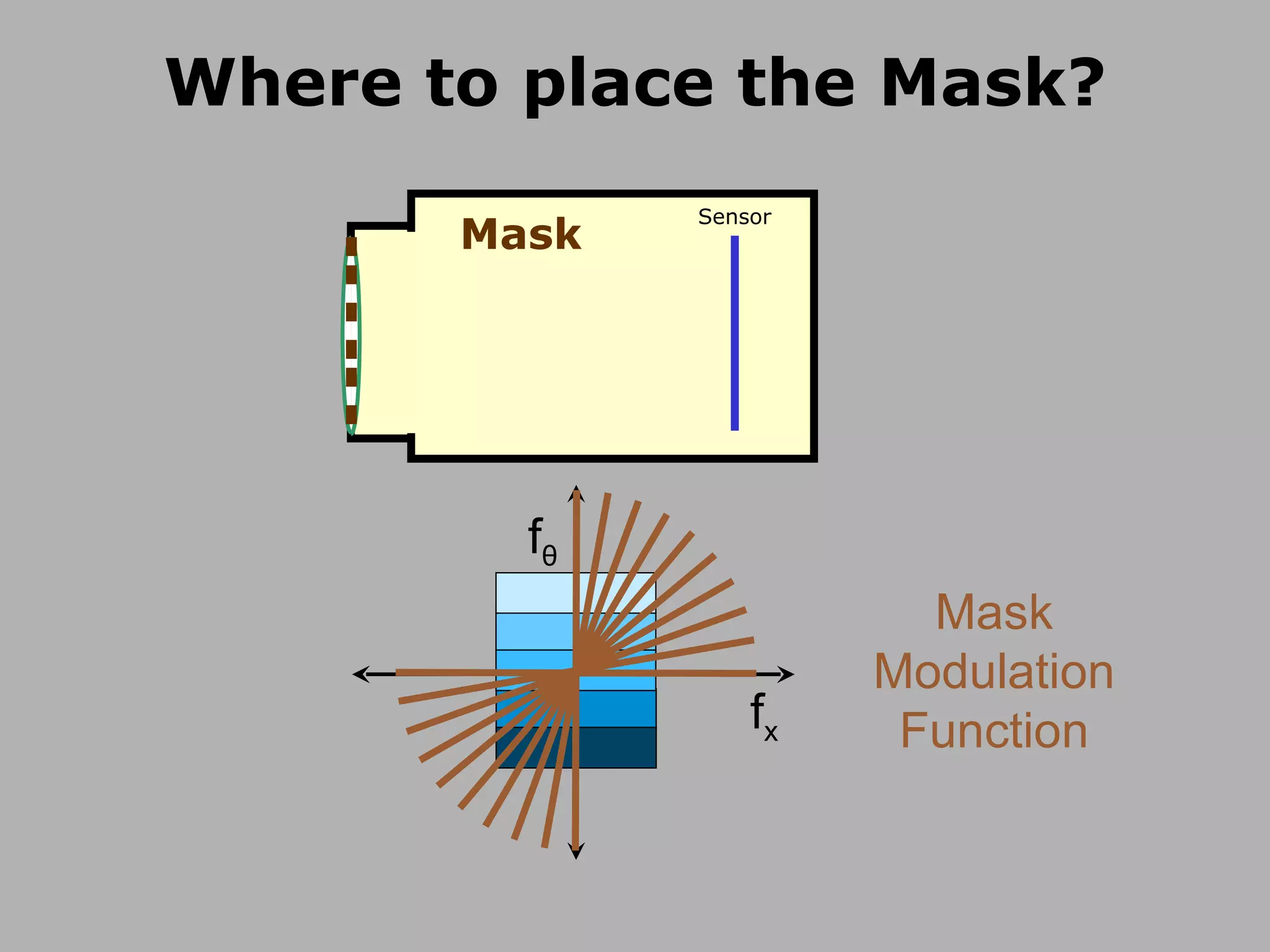
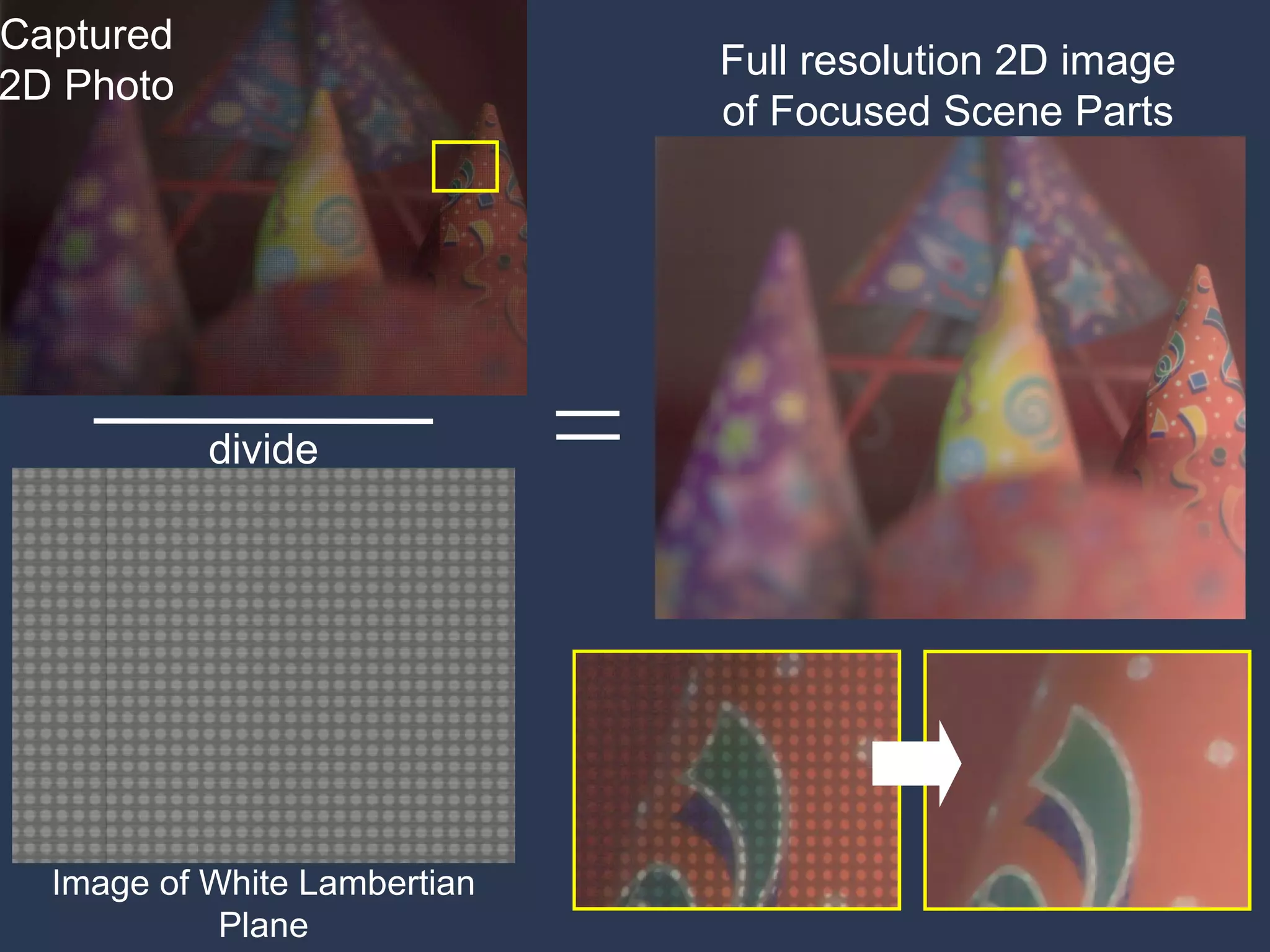
![Mask based Light Field Camera [Veeraraghavan, Raskar, Agrawal, Tumblin, Mohan, Siggraph 2007 ] Mask Sensor](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-42-2048.jpg)
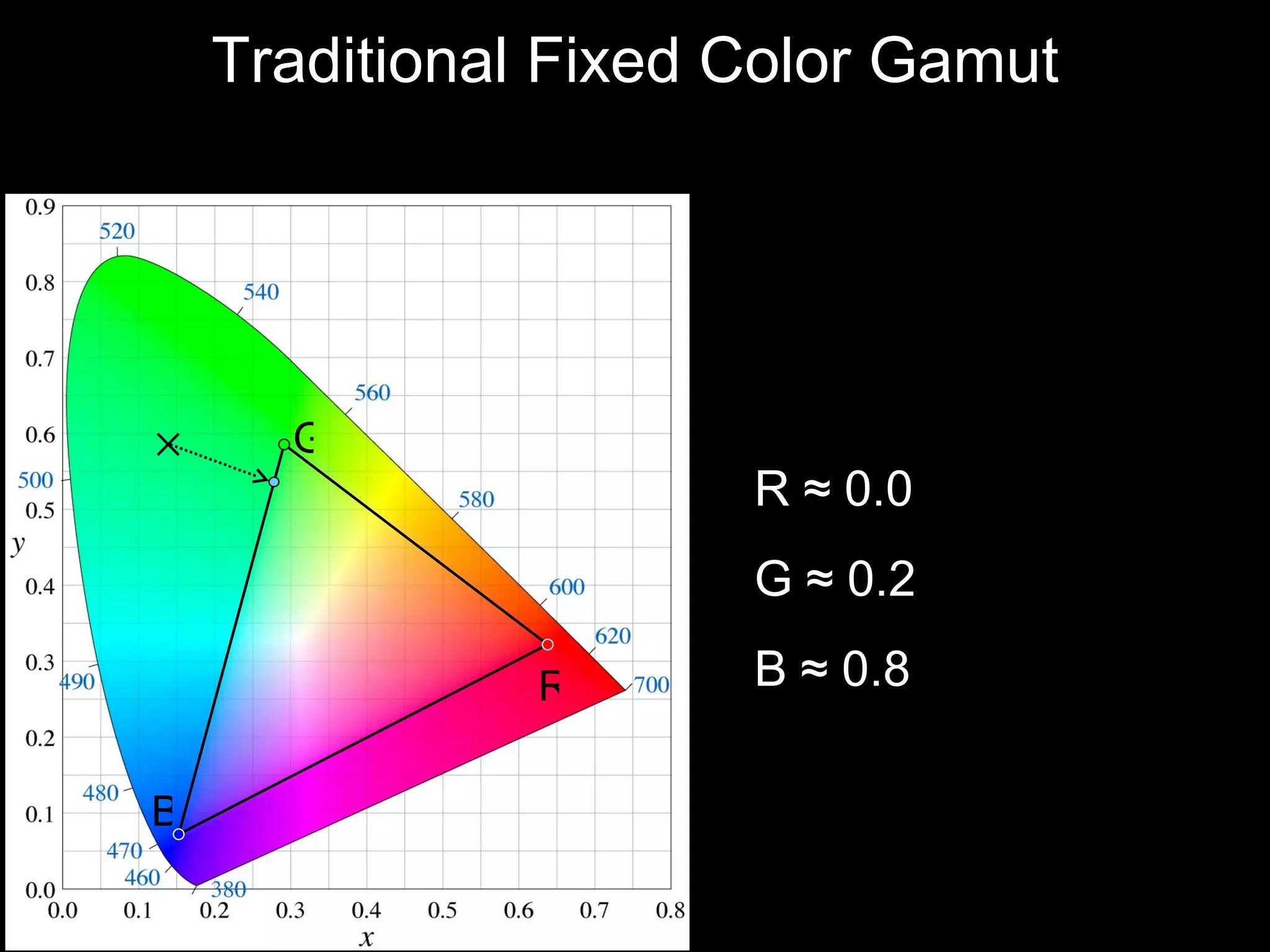
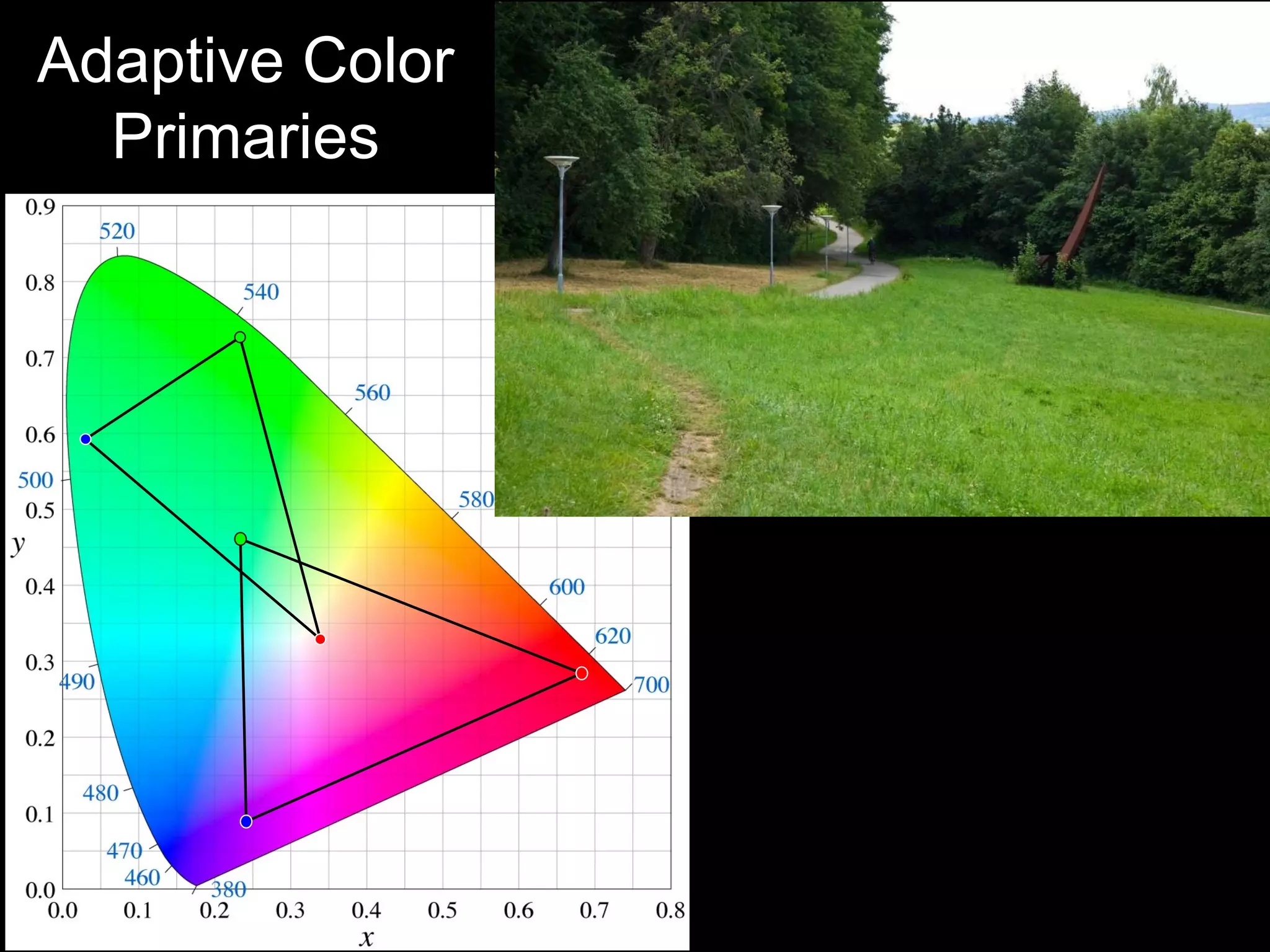
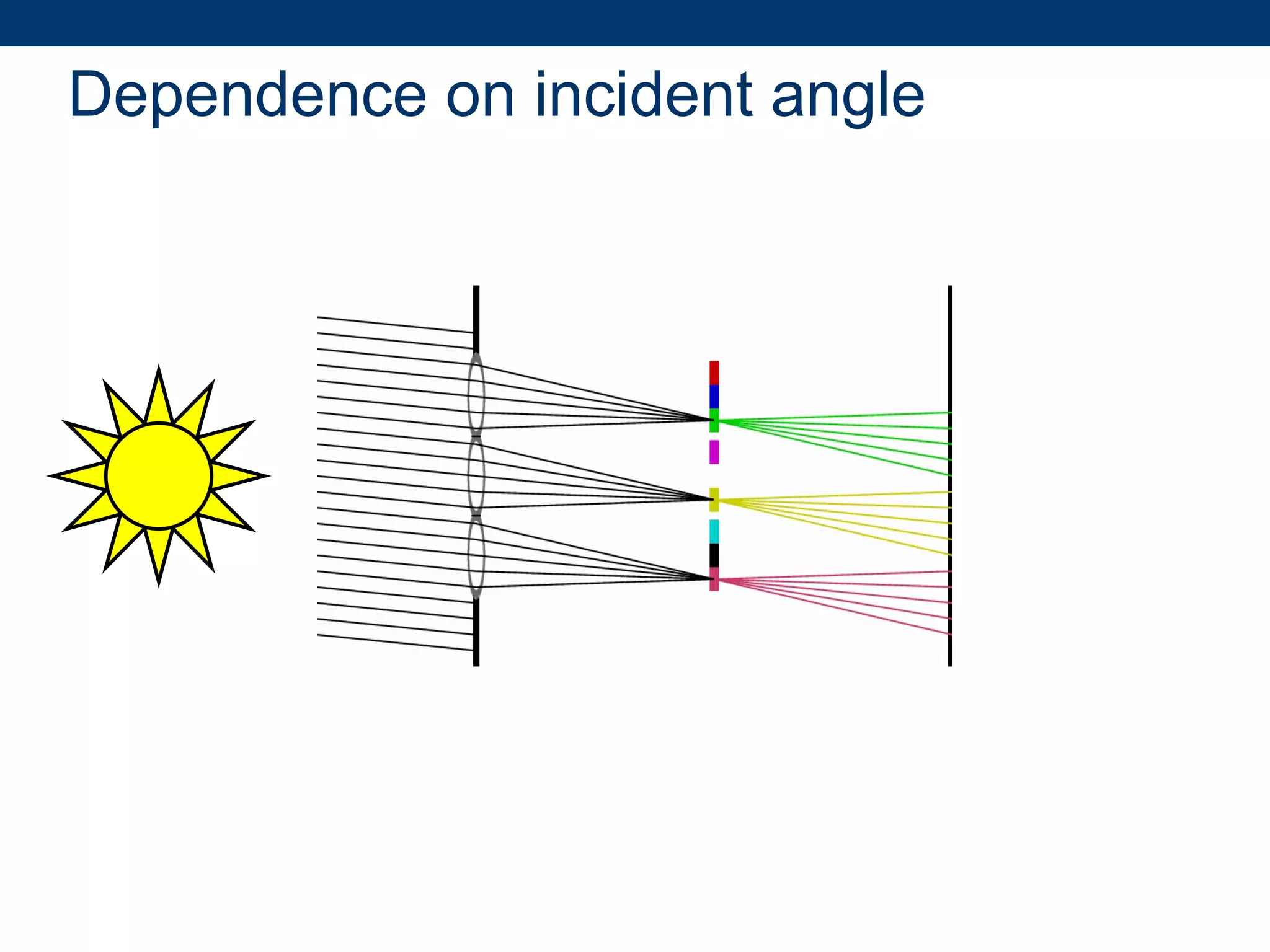
![Agile Spectrum Imaging Programmable Color Gamut for Sensor With Ankit Mohan, Jack Tumblin [Eurographics 2008]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-58-2048.jpg)
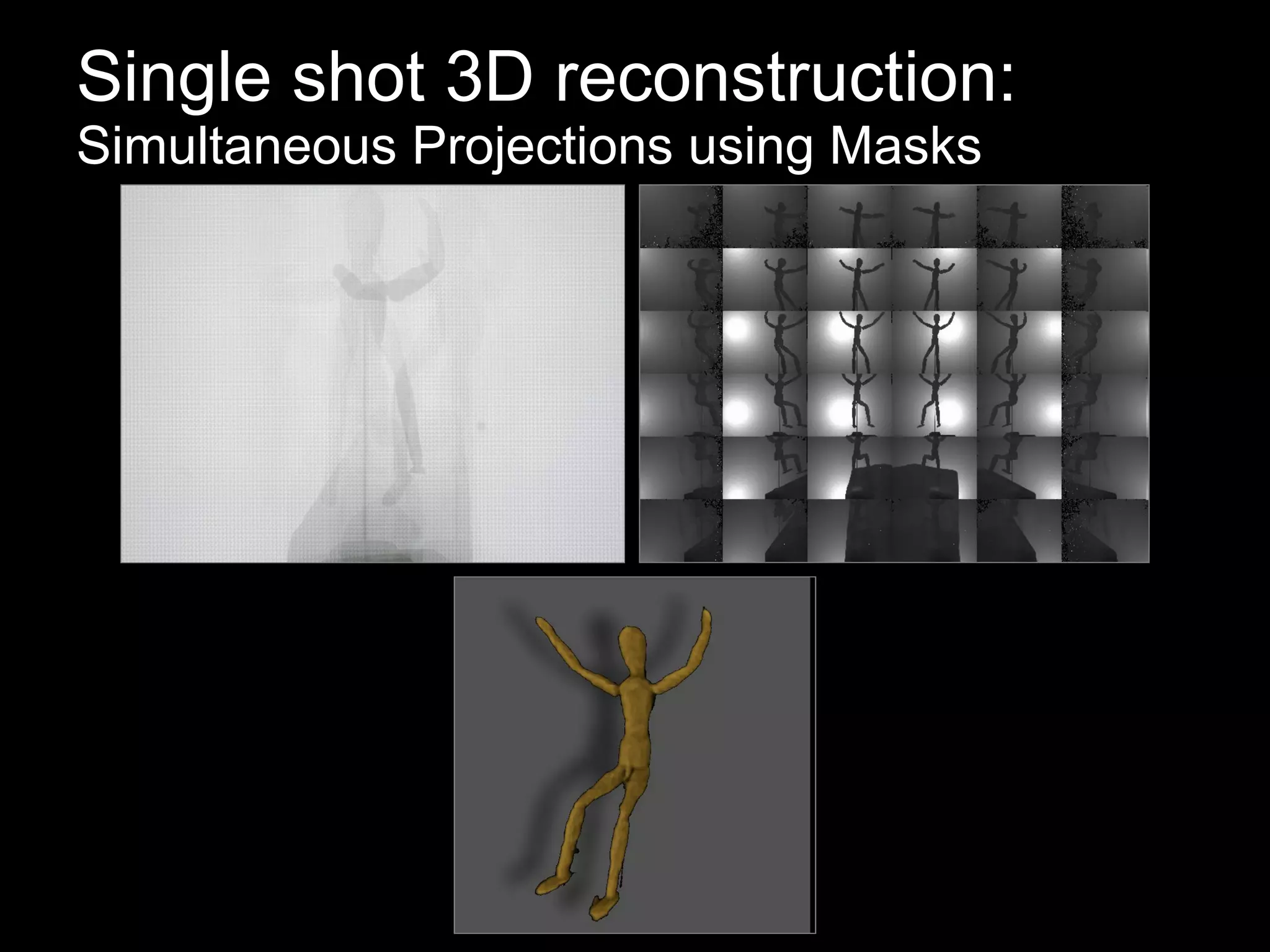
![Single shot visual hull Lanman, Raskar, Agrawal, Taubin [Siggraph Asia 2008]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-73-2048.jpg)
![Barcode size : 3mm x 3mm Distance from camera : 5 meter Long Distance Bar-codes Woo, Mohan, Raskar, [2008]](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-75-2048.jpg)
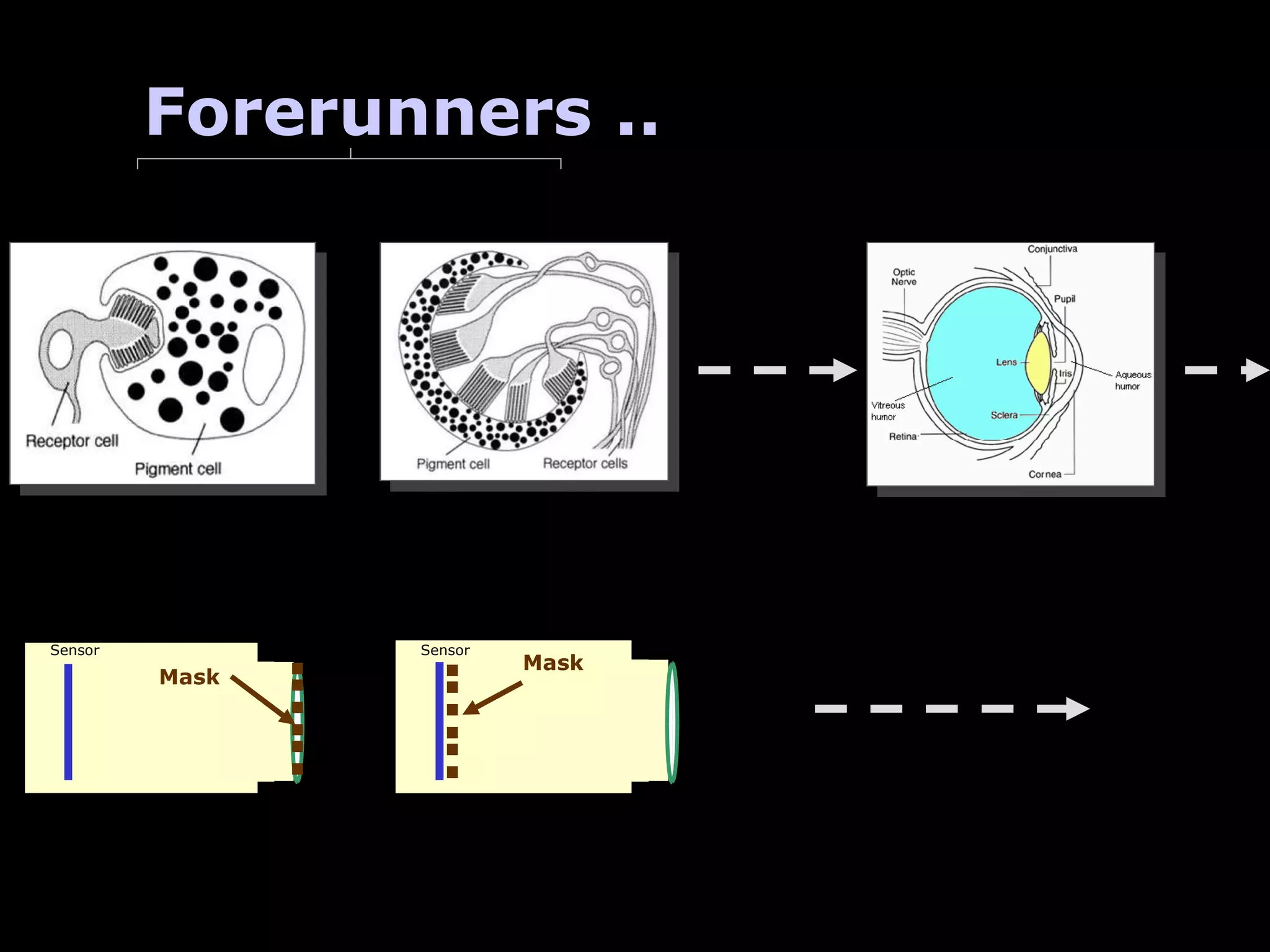
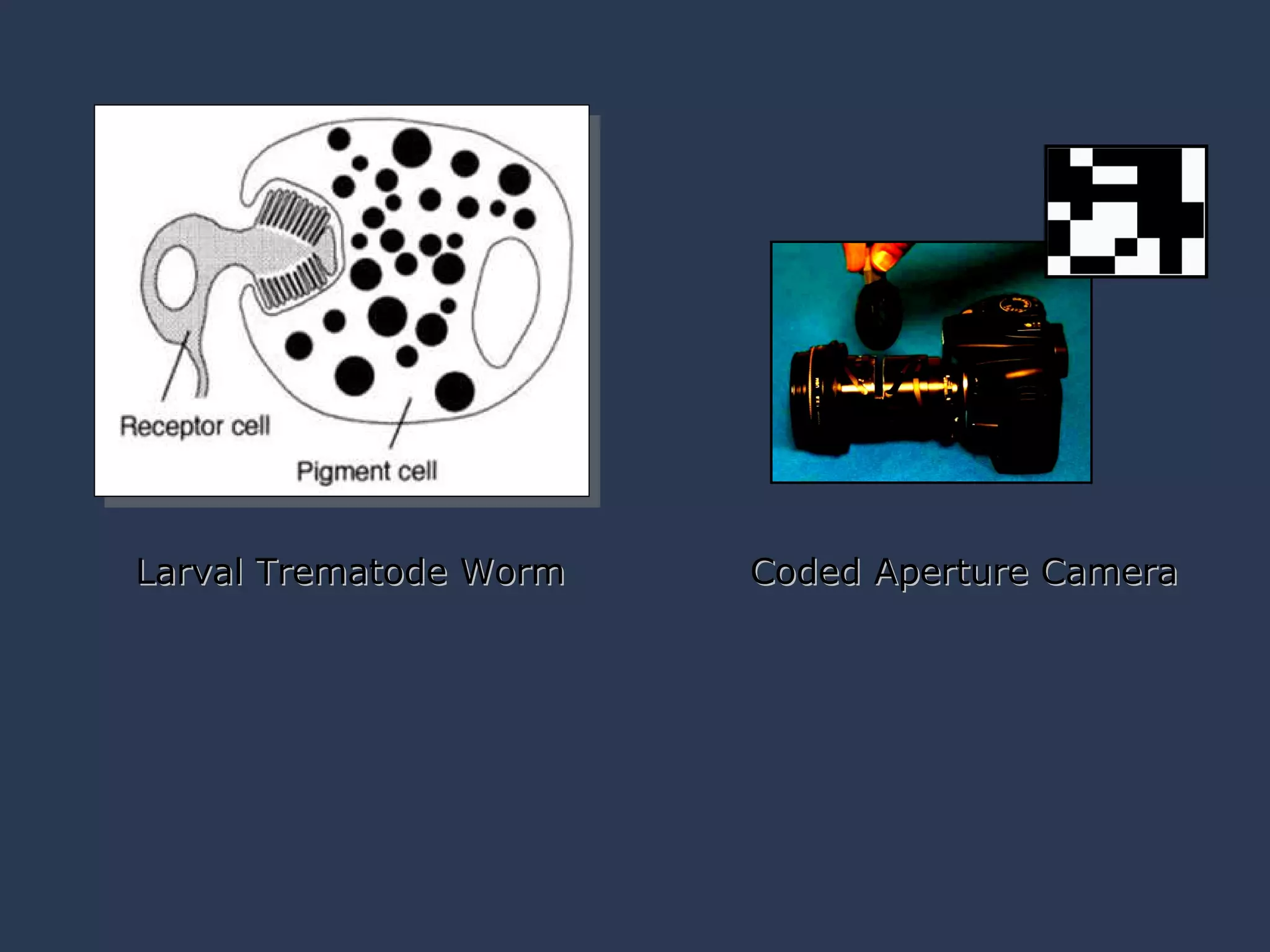
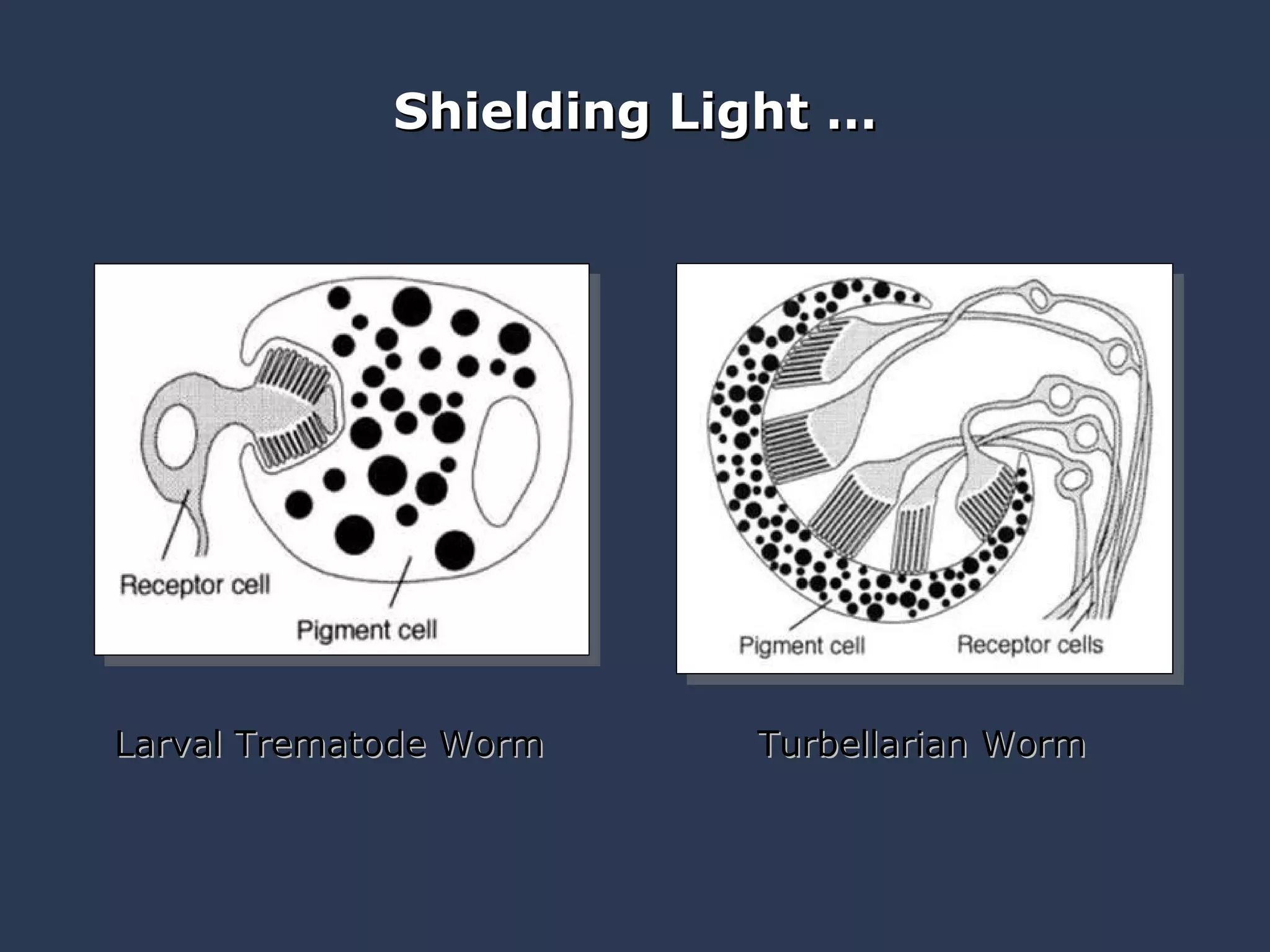
![Fernald, Science [Sept 2006] Shadow Refractive Reflective Tools for Visual Computing](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-84-2048.jpg)

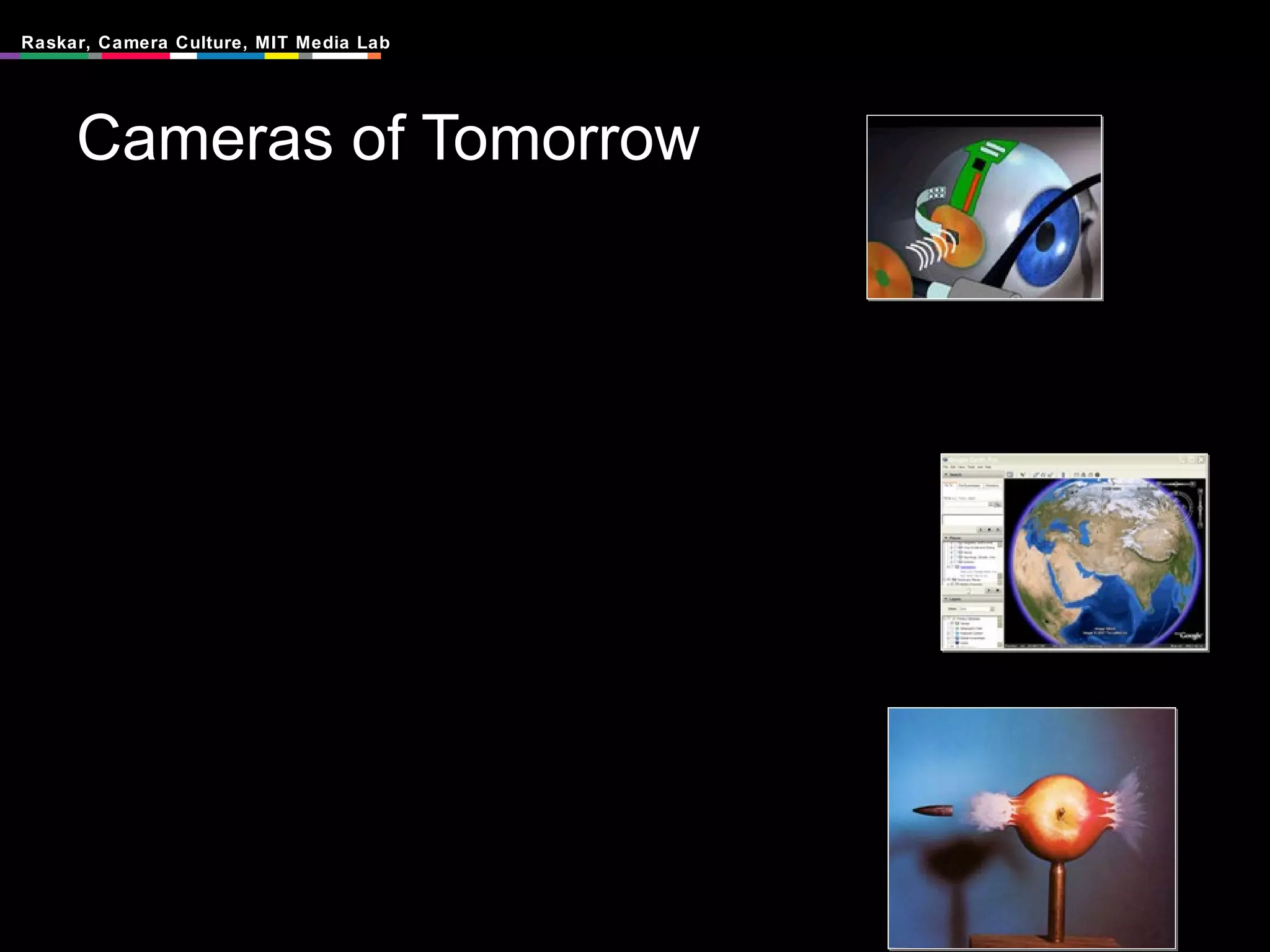
![Cameras of Tomorrow Coded Exposure Motion Deblurring [2006] Coded Aperture Focus Deblurring [2007] Glare reduction [2008] Optical Heterodyning Light Field Capture [2007] Coded Illumination Motion Capture [2007] Multi-flash: Shape Contours [2004] Coded Spectrum Agile Wavelength Profile [2008] Epsilon-> Coded ->Essence Photography http://raskar.info](https://image.slidesharecdn.com/raskarilpoct08web-090428161403-phpapp02/75/Raskar-Ilp-Oct08-Web-88-2048.jpg)


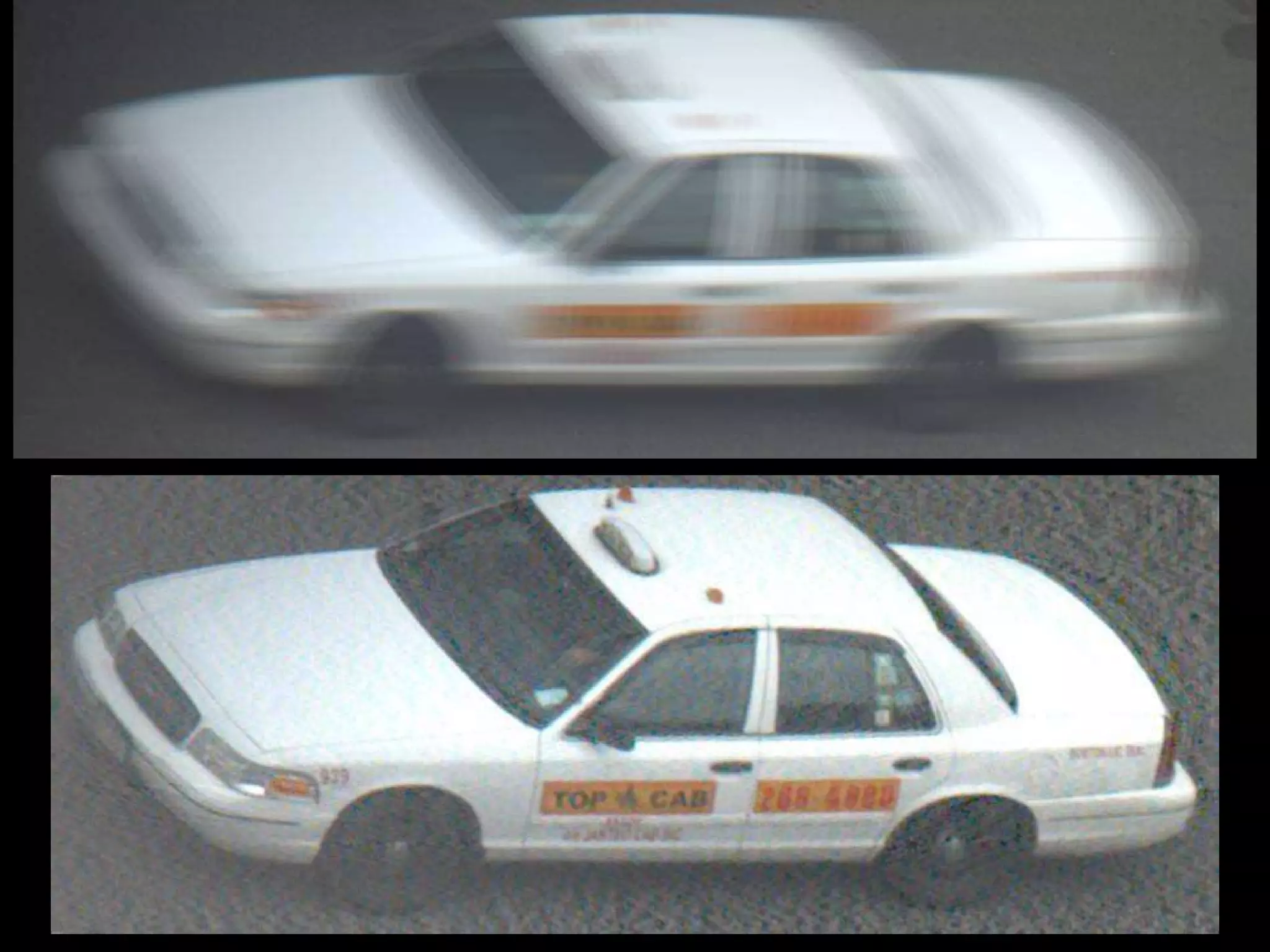
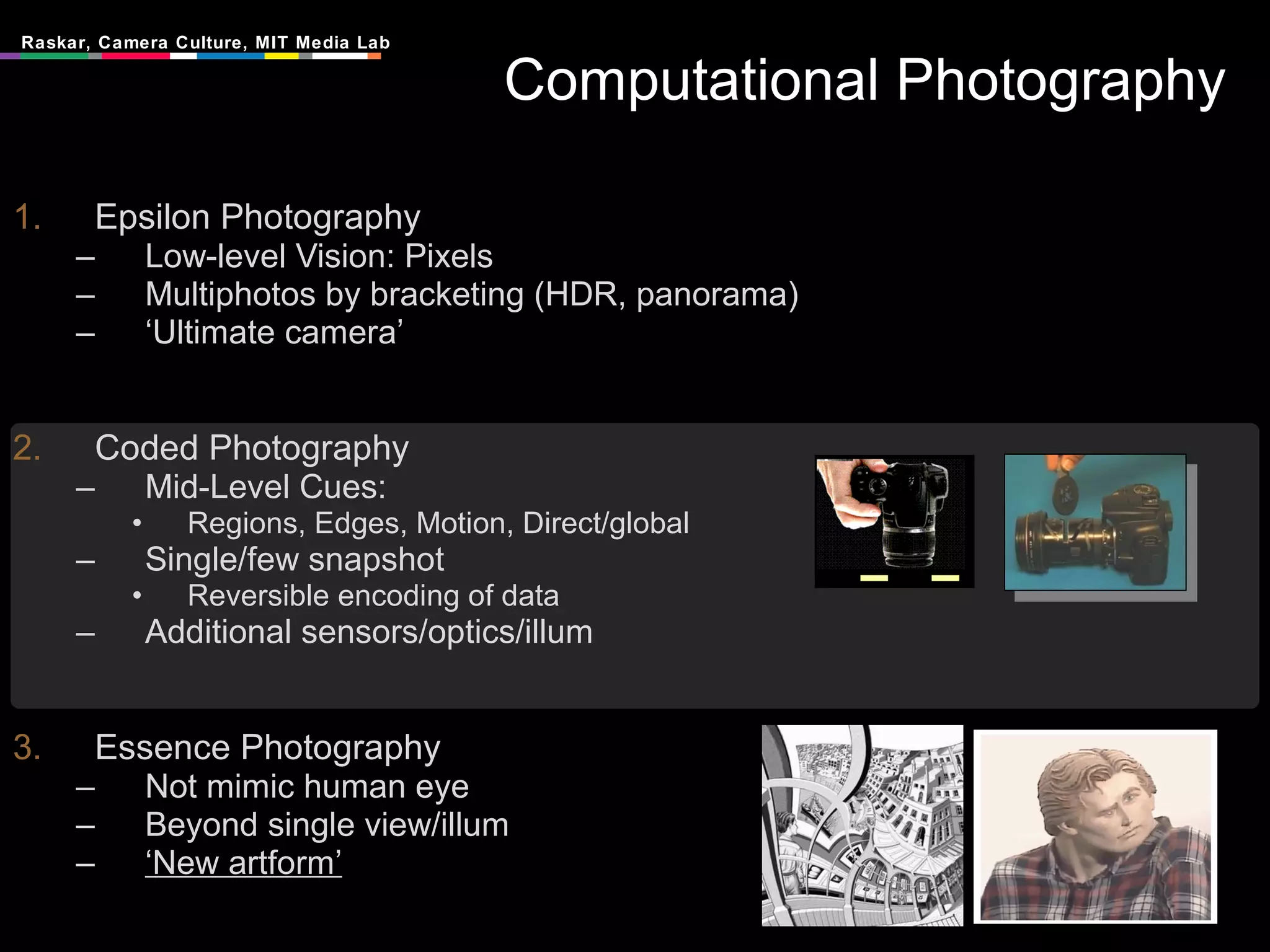
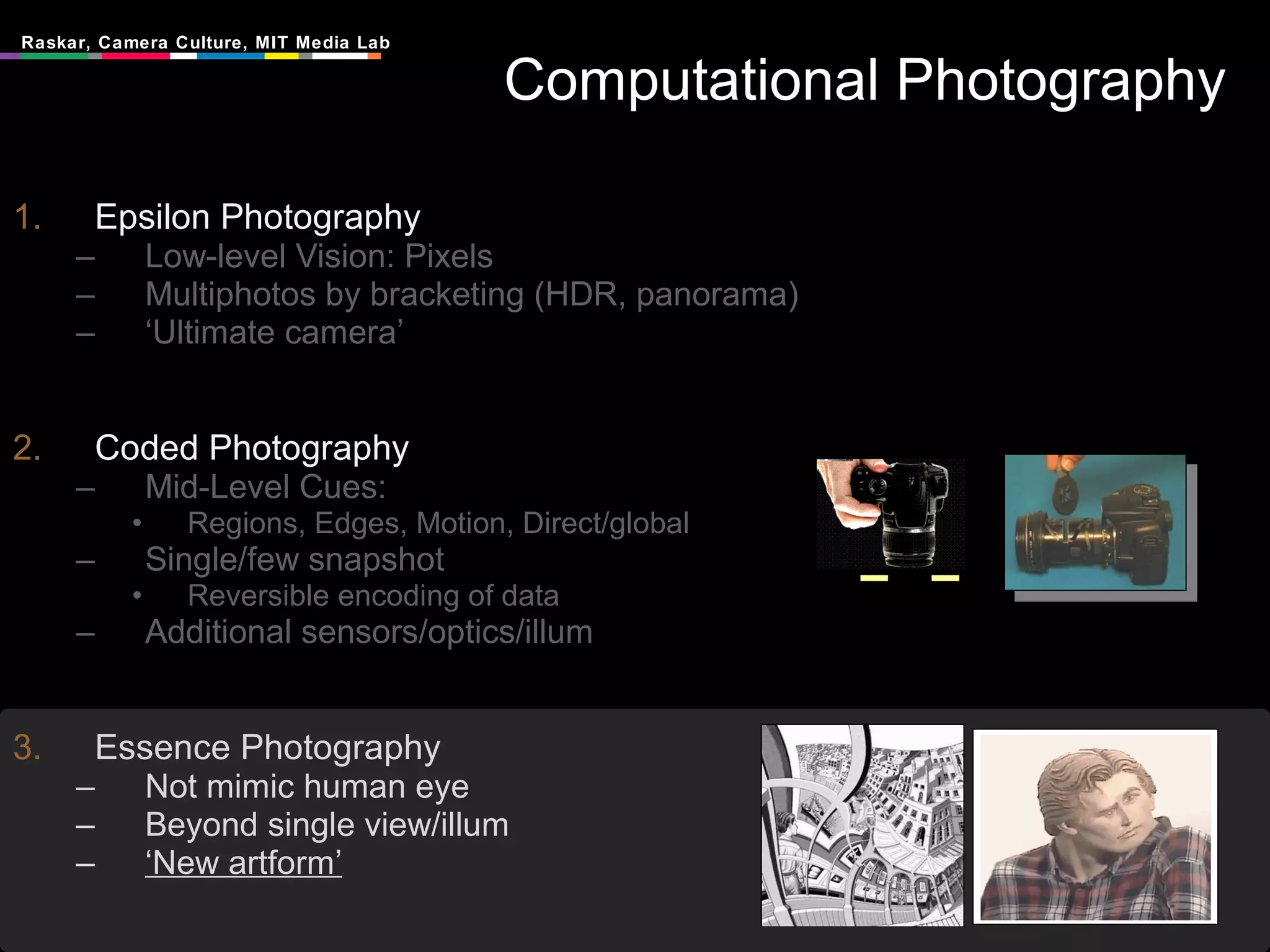
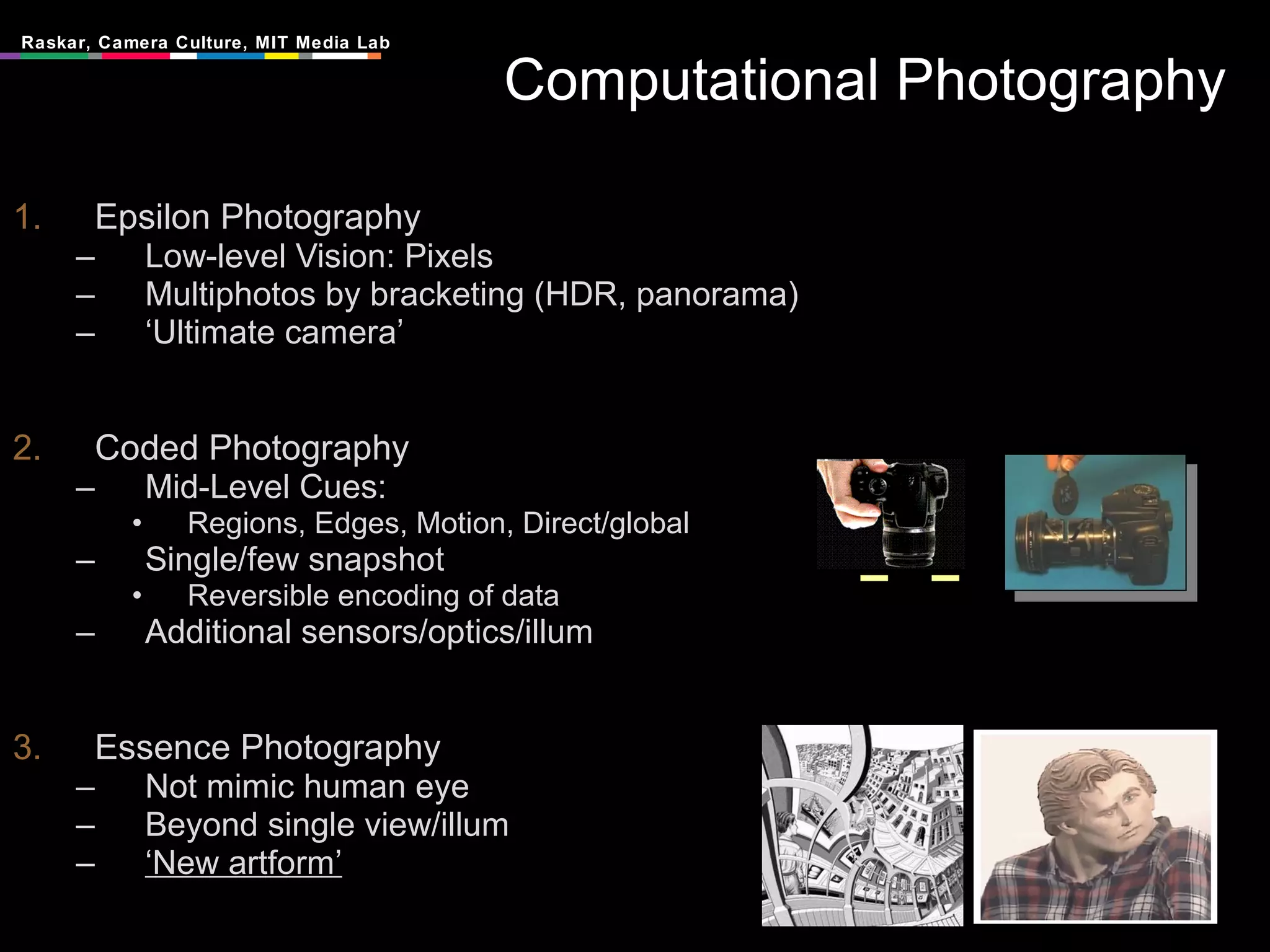
1. Ramesh Raskar discusses his research in computational photography and creating new types of cameras that go beyond traditional camera capabilities. 2. The goal is to develop imaging platforms that have a deeper understanding of the visual world than humans by capturing and analyzing more information. 3. Examples of this research include cameras that can capture light fields and refocus images after capture, cameras that can remove motion blur in a single photo, and techniques for capturing high-speed motion with imperceptible tags.







































































![Reading Techniques [Autosaved].pptxReading Techniques [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/readingtechniquesautosaved-251211193055-b8821f9d-thumbnail.jpg?width=640&height=640&fit=bounds)














