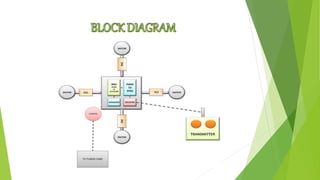
This document summarizes a quadcopter project completed by Ismail and Santosh. It describes the key components of the quadcopter, including four motors whose speed and direction of rotation are controlled by the user to lift and propel the aircraft. The quadcopter uses a brushless motor, electronic speed controller, flight controller, lithium polymer battery, power distribution board, and radio transmitter and receiver to function, while its frame holds these components.