Download as PDF, PPTX
![Open problems
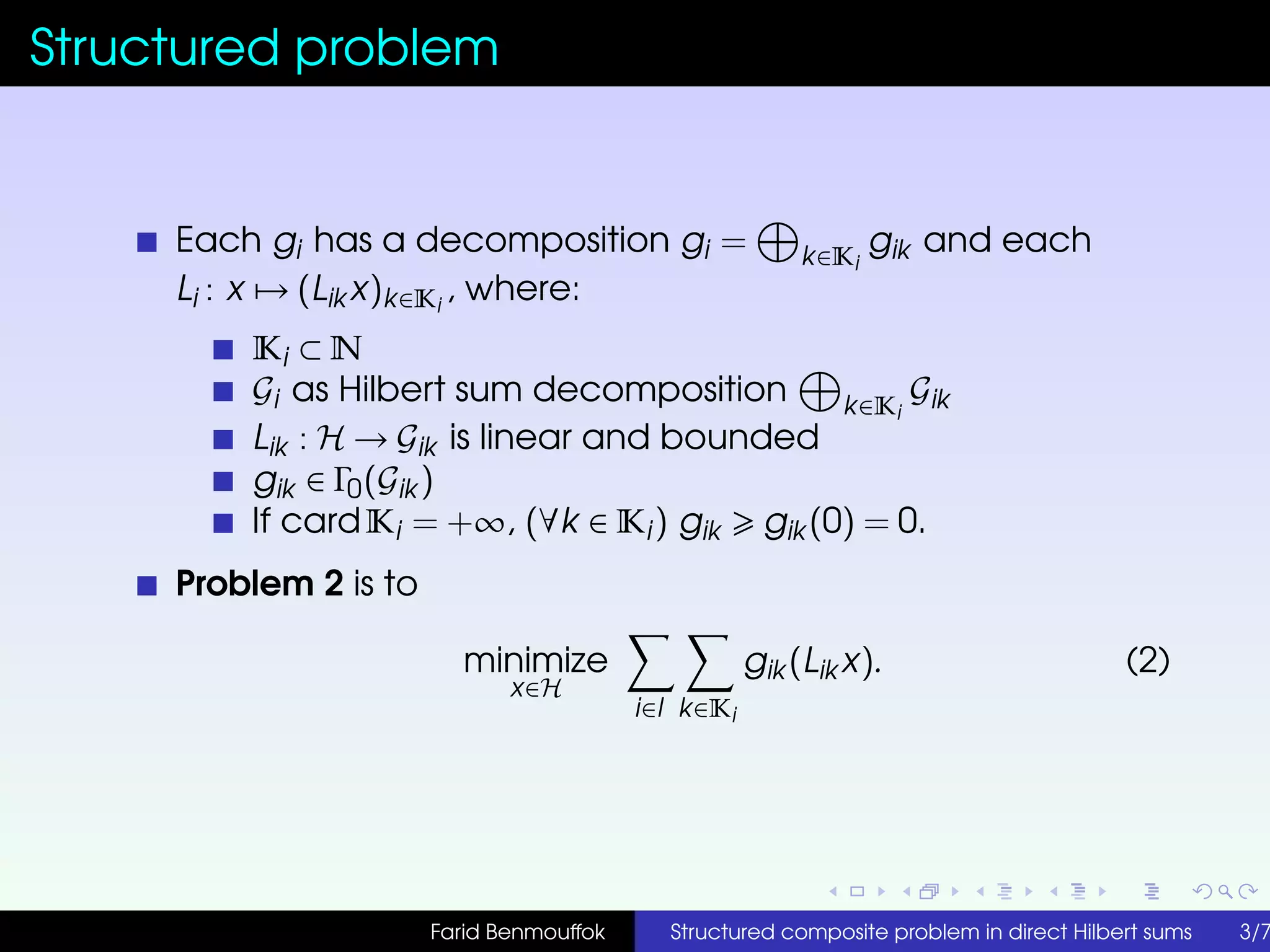
A prevalent viewpoint in modern proximal splitting algorithms is
that to activate each function gik appearing in the model there
are two options:
If gik is smooth, i.e, real-valued and differentiable
everywhere with a Lipschitzian gradient, then use gik ;
otherwise, use gik ◦ Lik proximally, i.e, via its proximity
operator
If Lik L∗
ik = αId, then we have an explicit expression of
the proximity operator of gik ◦ Lik ;
otherwise, we can use the splitting algorithm to gik
and Lik separately, [Combettes and Eckstein 2018].
Question 1: Develop an efficient distributed block iterative
method to solve the Problem 2
Question 2: Extention to maximally monotone inclusion of
the form
0 ∈
i∈I k∈Ki
L∗
ik ◦ Aik ◦ Lik (6)
Farid Benmouffok Structured composite problem in direct Hilbert sums 7/7](https://image.slidesharecdn.com/benmouffokrev-180326221806/75/QMC-Operator-Splitting-Workshop-Structured-Composite-Problems-in-Direct-Hilbert-Sums-Farid-Benmouffok-Mar-21-2018-10-2048.jpg)
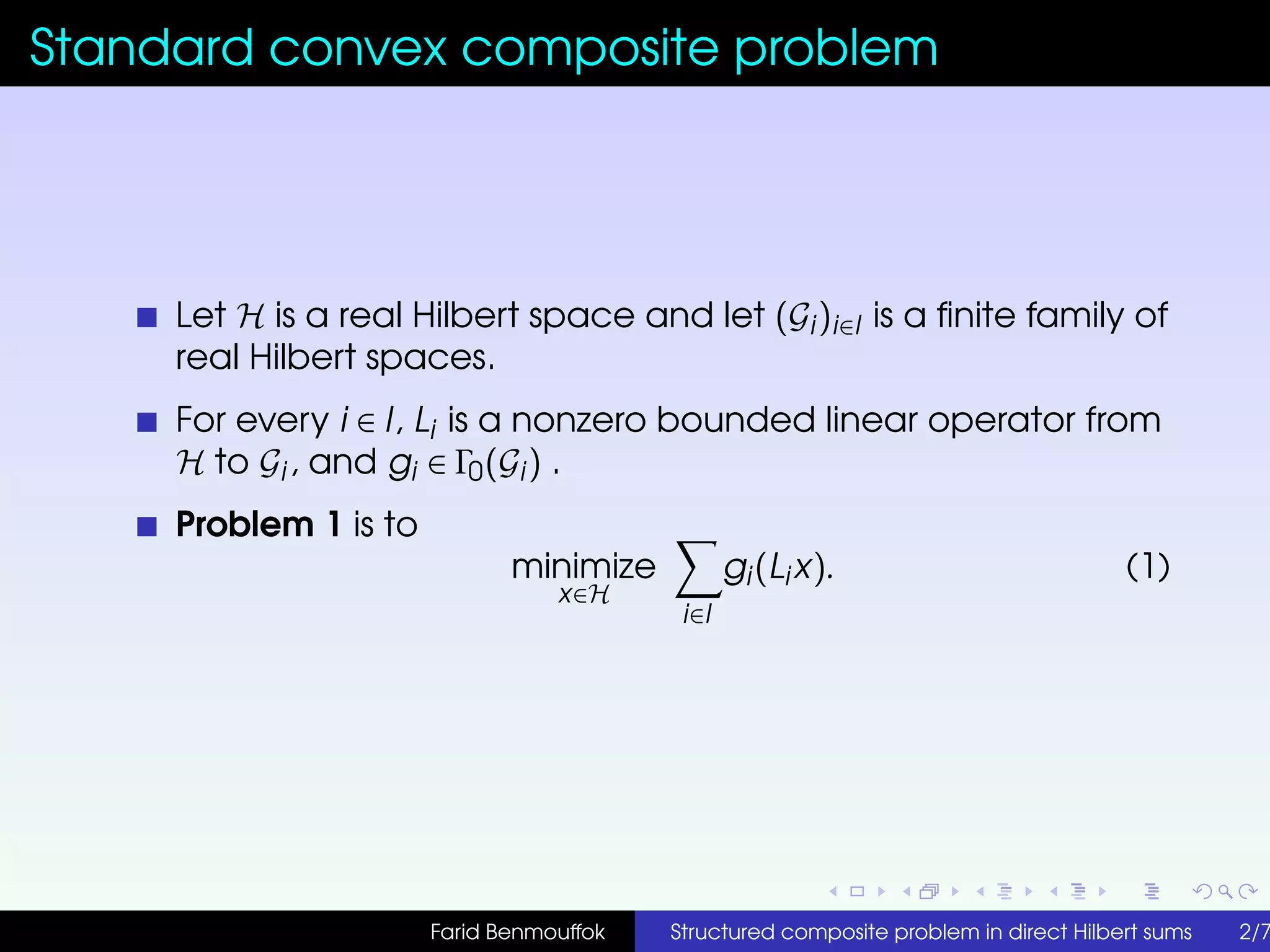
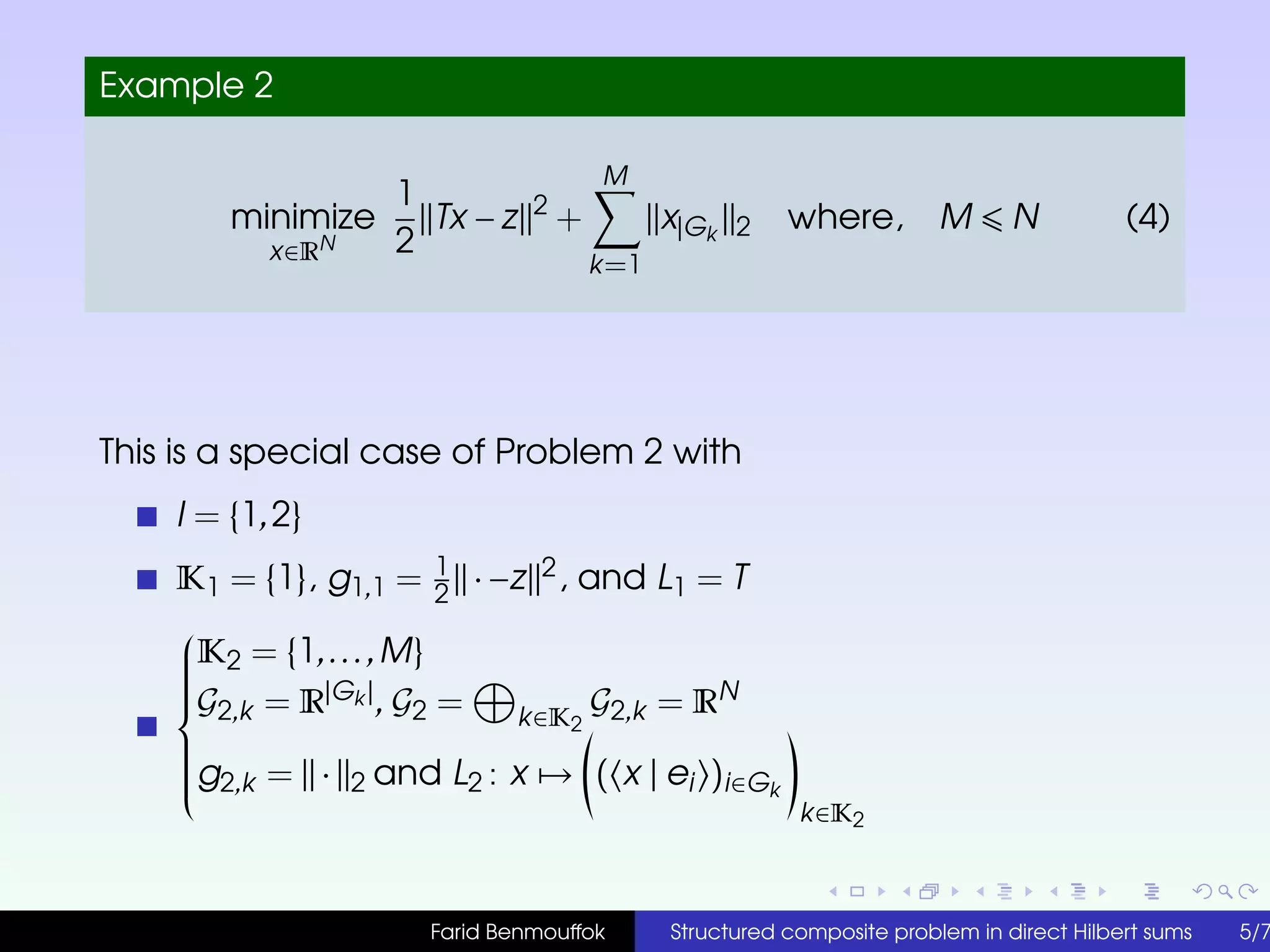
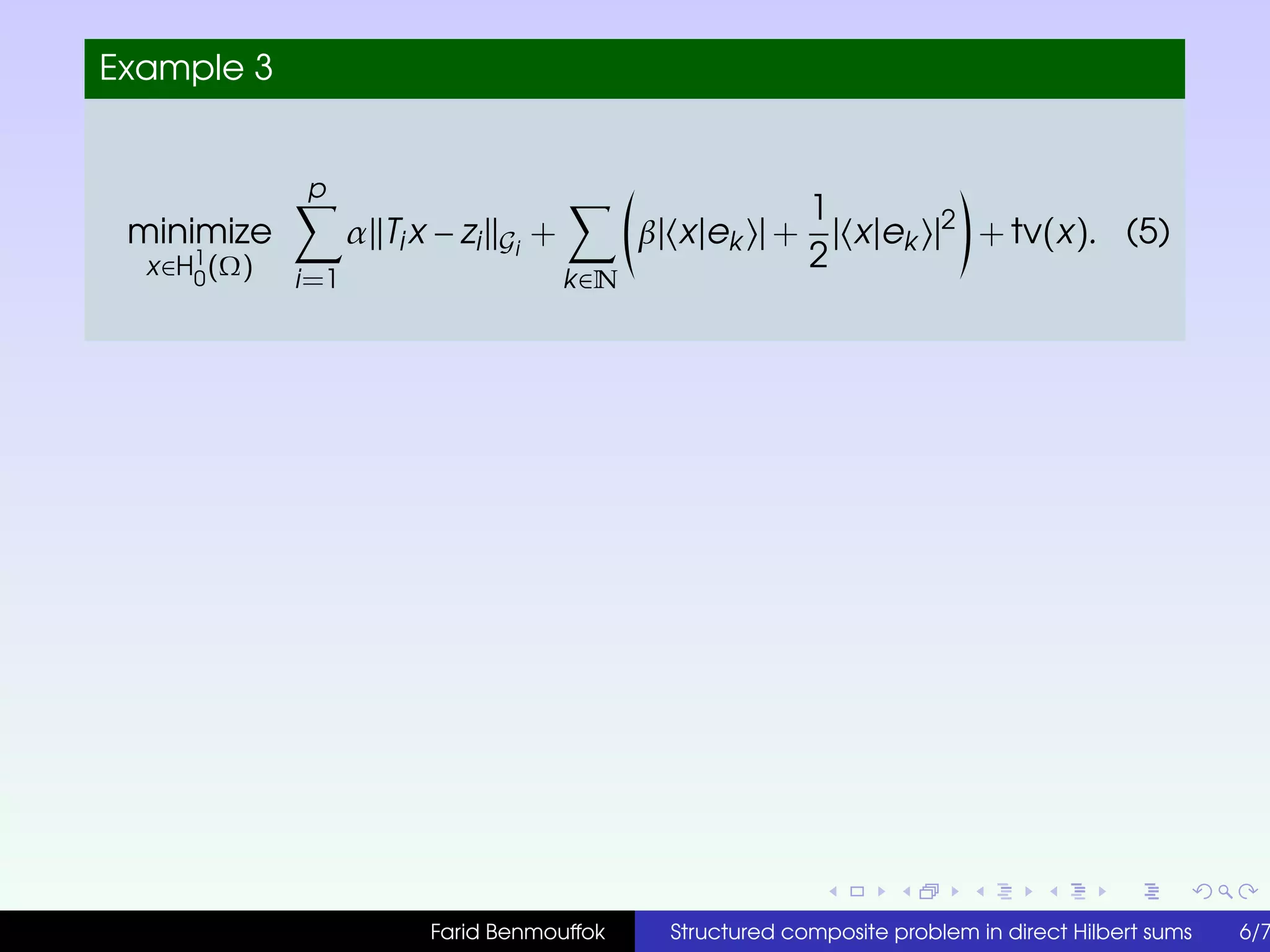
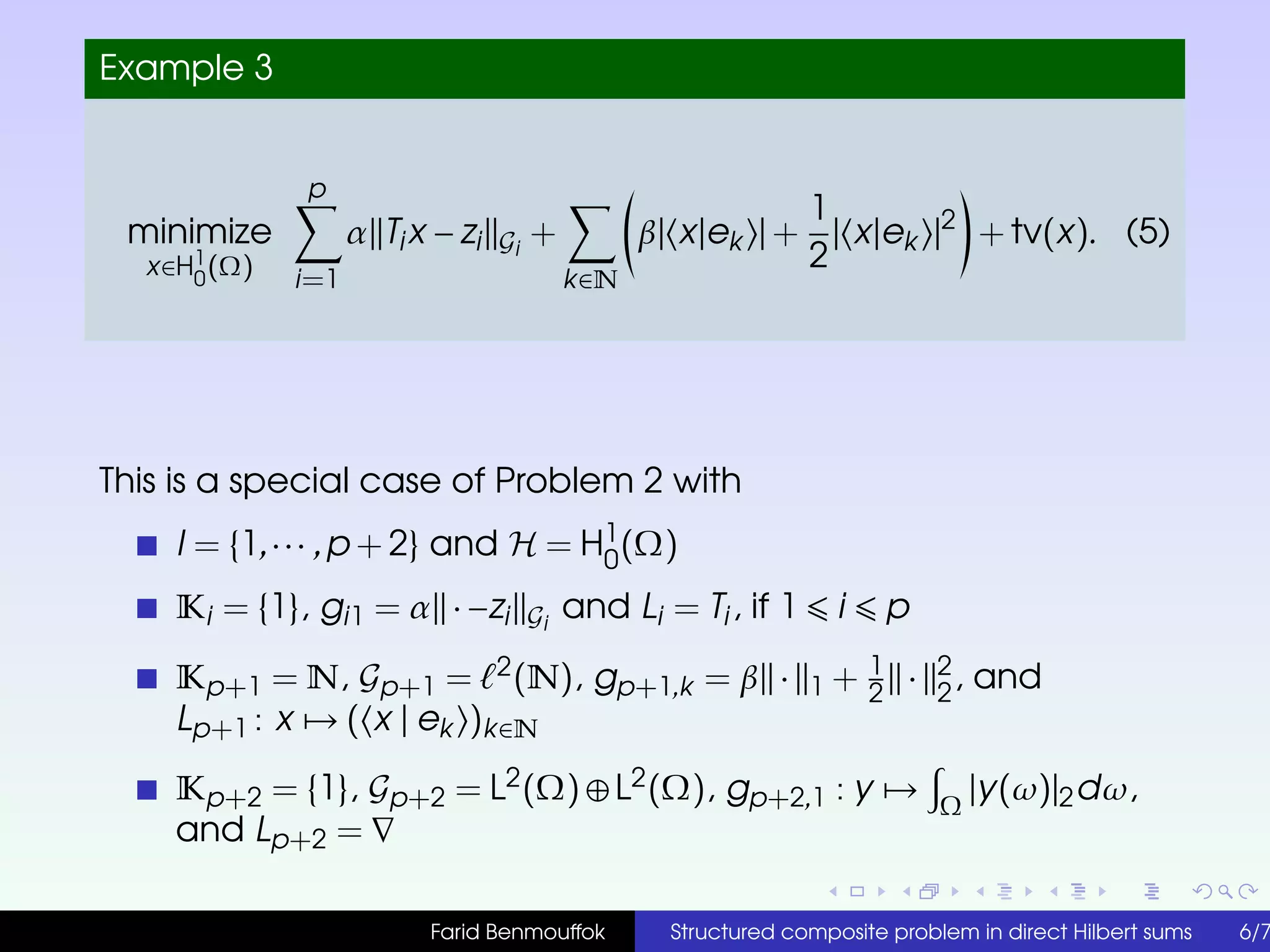
This document presents a structured composite minimization problem involving minimizing the sum of functions over direct Hilbert sums. It gives examples of how standard convex composite problems and regularization problems can be represented as special cases of this structured problem. It discusses options for activating the functions using proximal operators or separately handling the linear operators and functions. It poses two open problems - developing an efficient distributed block iterative method to solve the structured problem and extending it to maximally monotone inclusions.