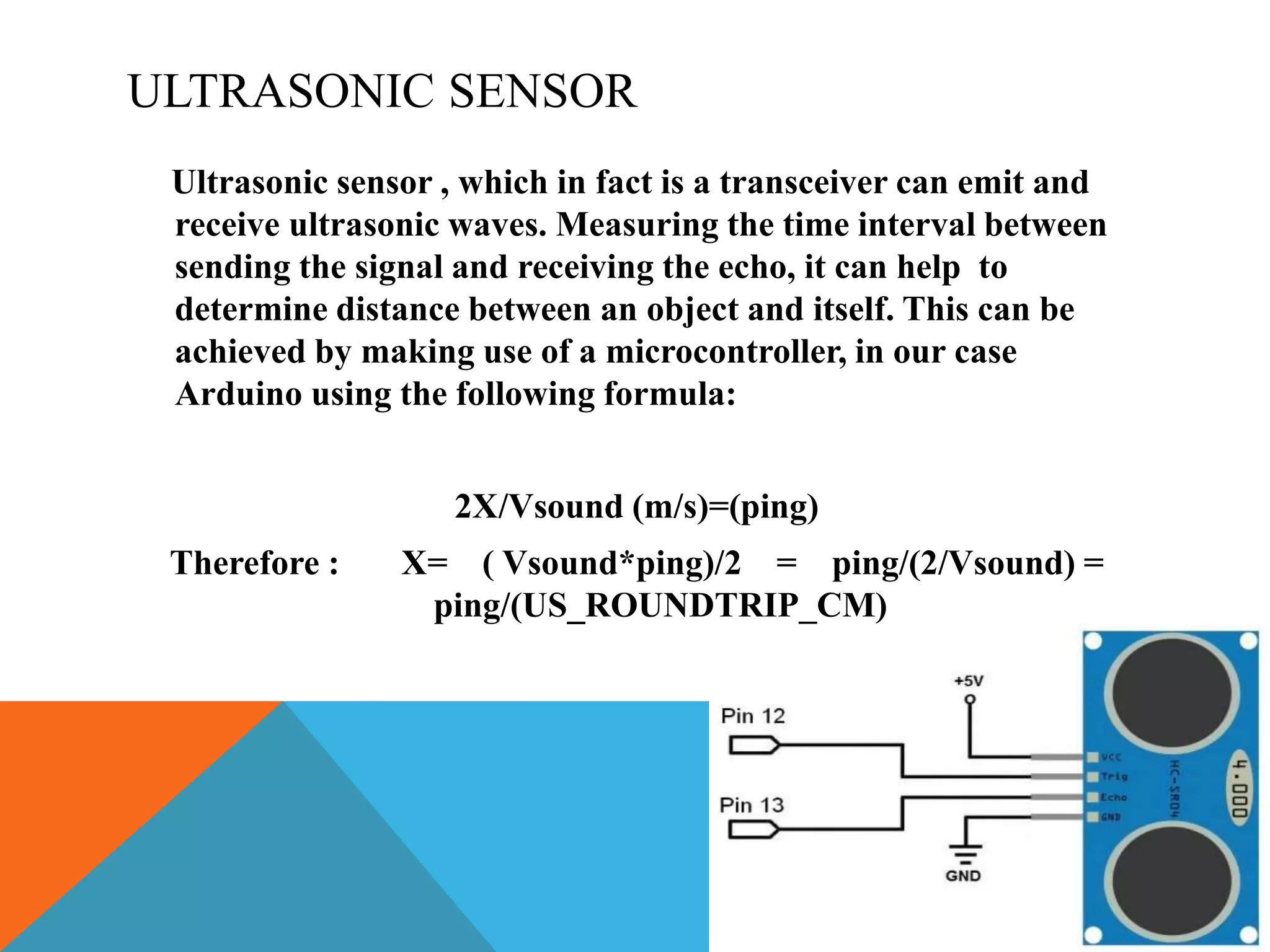
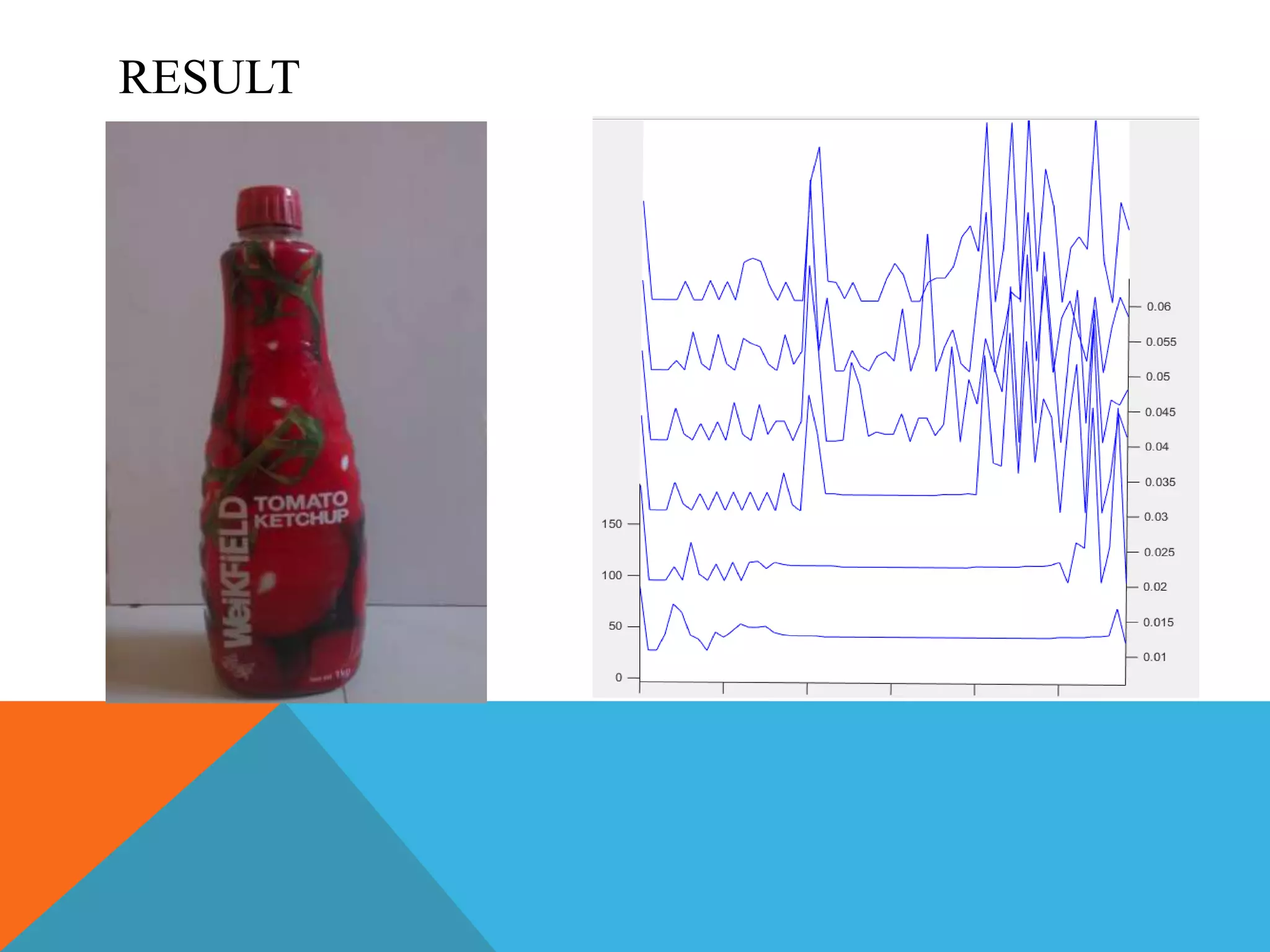
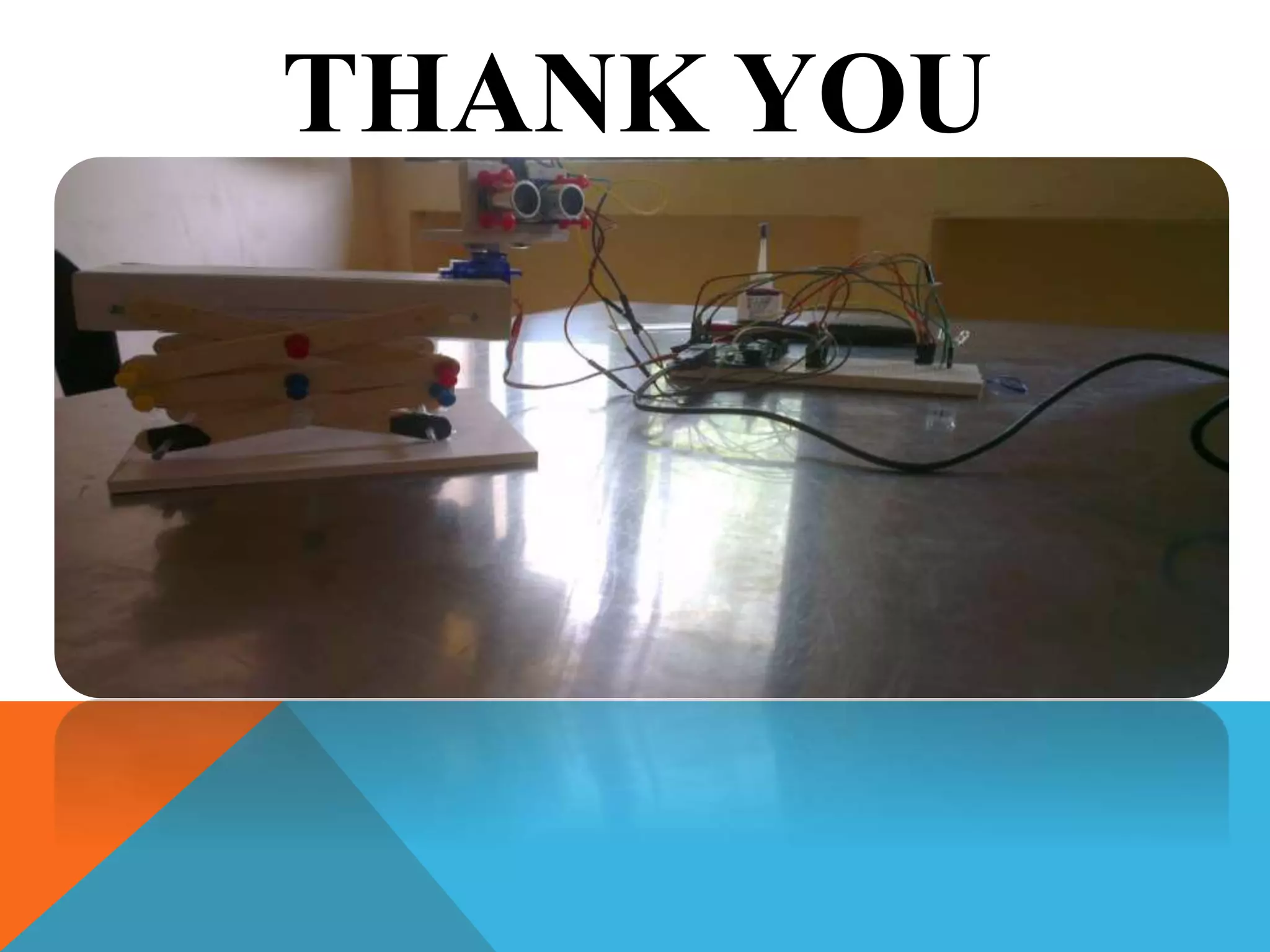
This project aims to create a rough map of an object using an ultrasonic sensor. The sensor measures distance at different points on the object as it is rotated and moved. These distance measurements are sent to a computer running MATLAB, which processes the data and generates a mesh plot approximating the object's shape. Components needed include an Arduino, ultrasonic sensor, servo motor, and lifting mechanism to move the sensor. Limitations include low precision and the inability to create a full 3D plot. Potential extensions involve adding remote control, improved filtering, and using it to map rooms in dark environments.