![Presentation #8
Target task = sensor scattering:
Automatic deployment of disposable wireless sensors by a drone
Motivation
• Deploying sensors by drones instead of humans has advantages in terms of
worker safety and time requirements
Technical challenge
• Optimal plan to maximize information gain from scattered sensors
Human detection
in landslideFlash flood detection
[Abdulaal+, IWRSN14]
Contamination
detection
NP-hard](https://image.slidesharecdn.com/20181003iros18pub-181002180607/75/SuMo-SS-Submodular-Optimization-Sensor-Scattering-for-Deploying-Sensor-Networks-by-Drones-2-2048.jpg)
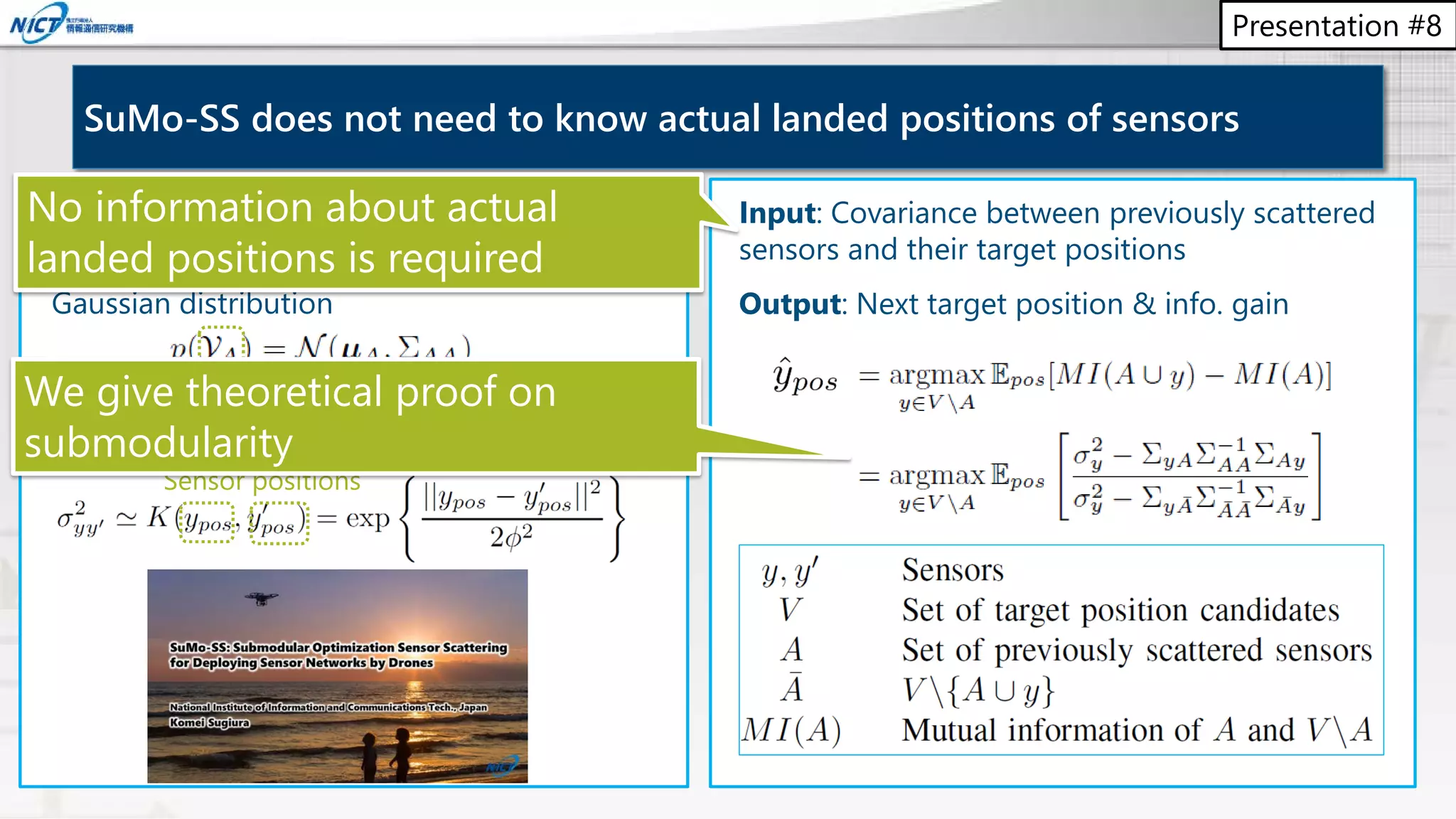
![Presentation #8
We prove that SubModular Sensor Scattering (SuMo-SS) is online, semi-
optimal, and can handle uncertainty
Sensor scattering problem is NP-hard
• Combinatorial explosion
Related work utilized submodular
optimization (e.g. [Krause 08])
• (1-1/e)-approximation = 63% of optimal
score is guaranteed
• However, uncertainty was not handled](https://image.slidesharecdn.com/20181003iros18pub-181002180607/75/SuMo-SS-Submodular-Optimization-Sensor-Scattering-for-Deploying-Sensor-Networks-by-Drones-3-2048.jpg)
![Presentation #8
We prove that SubModular Sensor Scattering (SuMo-SS) is online, semi-
optimal, and can handle uncertainty
Sensor scattering problem is NP-hard
• Combinatorial explosion
Related work utilized submodular
optimization (e.g. [Krause 08])
• (1-1/e)-approximation = 63% of optimal
score is guaranteed
• However, uncertainty was not handled
Proposed method (SuMo-SS)
• Handles uncertainty in sensor positions
• Does not suffer from combinatorial
explosion
• (1-1/e)-approximation is guaranteed
Without remote control
x10](https://image.slidesharecdn.com/20181003iros18pub-181002180607/75/SuMo-SS-Submodular-Optimization-Sensor-Scattering-for-Deploying-Sensor-Networks-by-Drones-4-2048.jpg)
![Presentation #8
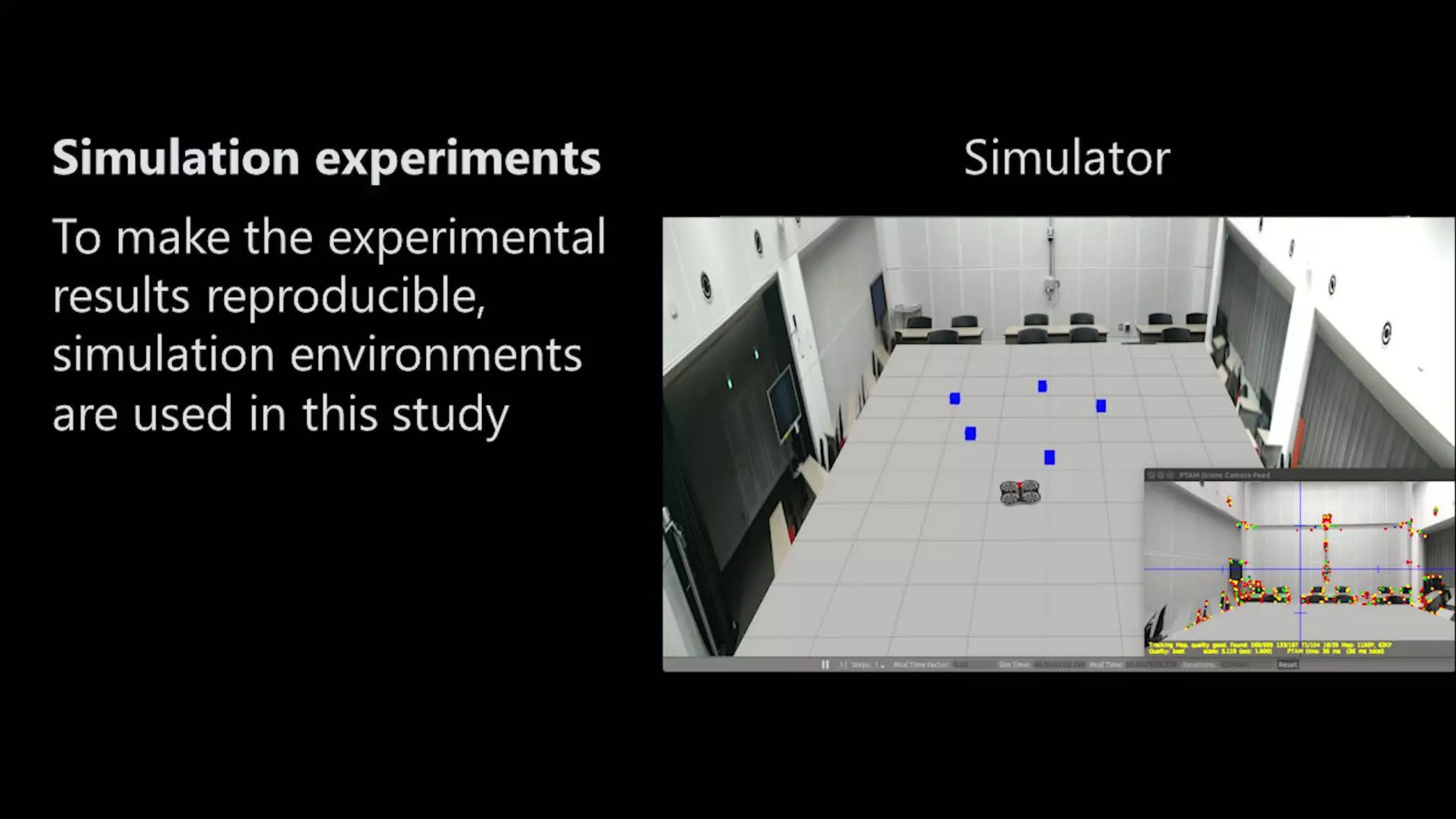
Experimental setup:
We used a simulation environment to make experimental results reproducible
Physical model
• AR.Drone 2.0 with a customized
electromagnetic device for
attaching/detaching a sensor
• Monocular SLAM[Engel+ 14]
Simulation model
• Purpose: To make the results
reproducible
– cf. Estimated lifetime of the
physical drone is <100 h](https://image.slidesharecdn.com/20181003iros18pub-181002180607/75/SuMo-SS-Submodular-Optimization-Sensor-Scattering-for-Deploying-Sensor-Networks-by-Drones-6-2048.jpg)
![Presentation #8
Quantitative results: Proposed method obtained larger mutual information
than baseline and random selection methods
Metric = Cumulative mutual info.
(a) Proposed (SuMo-SS)
(b) Baseline [Krause 08]
(c) Random selection
Sensitivity analysis
• Proposed method outperformed
the baseline[Krause 08] in 43/49
conditions
Deviation in x-axis
Deviationiny-axis
*Average of 10 experiments
Cumulativemutualinfo.](https://image.slidesharecdn.com/20181003iros18pub-181002180607/75/SuMo-SS-Submodular-Optimization-Sensor-Scattering-for-Deploying-Sensor-Networks-by-Drones-8-2048.jpg)

The document presents a method called Submodular Optimization Sensor Scattering (SuMo-SS) for deploying sensors from drones to maximize information gain. The sensor scattering problem is NP-hard due to combinatorial explosion. SuMo-SS handles uncertainty in sensor positions and does not suffer from combinatorial explosion, providing a (1-1/e)-approximation guarantee. Simulation results show SuMo-SS obtained larger mutual information than baseline and random selection methods for sensor deployment from drones.


















































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)














