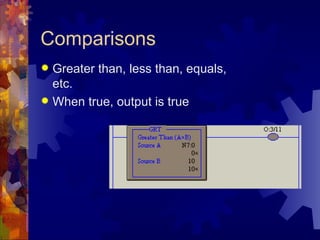
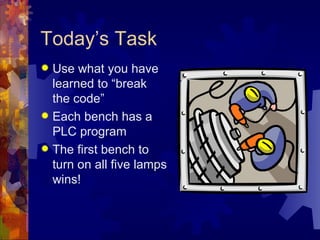
This document provides an overview of programmable logic controllers (PLCs) and their history and applications. It discusses how the first PLC was developed by General Motors in 1968 to replace a relay-based system. It also covers PLC components like the CPU, I/O modules, memory organization, and programming environments. Additional topics include sensors, discrete and analog I/O, addressing schemes, programming instructions like moves, comparisons, and counters. The purpose is to introduce students to basic PLC programming concepts.









































![IDRC Diaspora Study Presentation Toronto 1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/idrcscopingstudypppresentationtoronto11-13313051854427-phpapp02-120309090153-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



































![Food[1]](https://cdn.slidesharecdn.com/ss_thumbnails/food1-120617050843-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
























